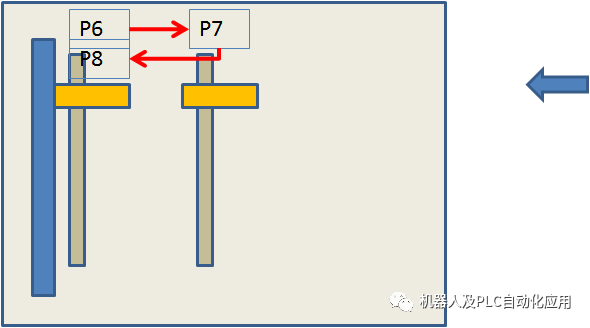
 通过接触位置确定后续坐标位置
通过接触位置确定后续坐标位置

LIN SUCHEN VB=350[mm/s] RobWzg=1Base=26 Fern=M28 Vred=10% Nah=M29 P
大众标注特有的轨迹搜索程序
5: Tech_ BaseverschiebungSuchlauf Base 31 setzen - - - xyz-MaxWeg:- Nahsensor=M29 EIN
当M29被触发后当前位置被报存为BASE31,从而后续使用BASE31的轨迹点的轨迹点实现偏移.
接触工件位置M29
LIN VB=700[mm/s] VE=0% ACC=100% RobWzg=20 Base=31 SPSTrig=5[1/100s]P
返回测量位置
LIN VB=400[mm/s] VE=0% ACC=100% RobWzg=31 Base=31 SPSTrig=5[1/100s]P
抓件位置
Tech_Baseverschiebung Suchlauf Base 31 setzen- - - xyz-MaxWeg:- Nahsensor=M29 EIN
VW_USER (#USR_ADV,105,11,0,0,0,0,29,TRUE)
------------------ADC------------------------
CASE 105 ;上级组0, 下级组5 提前执行
Sensor fuer Dehnfuge 传感器的伸缩缝
IF(PAR7==TRUE)THEN
SWITCH PAR1
CASE 1当P1设置为1时当前位置的BASE坐标村到BASE31里(这里我们不使用).
CONTINUE
Base_Data[31] = BASE_DATA[VW_MPARA_ACT.BASE_NO]
.................
CASE 11
CONTINUE
WHILE ($CYCFLAG[PAR6]==TRUE)M(P6)
MLD(22,#QuitMsg) ;搜索运行接近传感器故障
ENDWHILE
;ENDFOLD
-----------------------MAIN--------------
CASE 105 ; 上级组0,下级组5 在轨迹当前步 执行
设置搜索运行基数
IF(PAR7==TRUE)THEN
SWITCH PAR1
CASE 1;只在于执行里执行
CASE 11; ---------成功搜索后设置基数
CONTINUE
WHILE(VW_MPARA_ACT.BASE_NO<1) 当使用的BASE号不能是0
MLD(18,#QuitMsg); 如果是0提示BASE值不正确
ENDWHILE
IF $FLAG[Fehler_Suchlauf]==TRUE THEN F533开启搜索指令
MLD(16,#QuitMsg);没有提示信息
ENDIF
--------如果坐标号是31的话---------------
IF(BASE_TYPE[VW_MPARA_ACT.BASE_NO]==#BASE)THEN当前BASE的类型是#BASE
CONTINUE
$BASE=$NULLFRAME-------坐标值零----------
$BASE=$pos_act 当前坐标保存位BASE坐标值
BASE_DATA[31]=$BASE 保存在BASE31里
IF NOT $EXT THEN 不是外部自动会有提示信息,,并停止程序
MeldNr(4) ;这样的,新基坐标已定
HALT
ENDIF
ENDIF
审核编辑 :李倩
-
传感器
+关注
关注
2578文章
55830浏览量
795484 -
坐标
+关注
关注
1文章
18浏览量
21759
原文标题:通过接触位置确定后续坐标位置
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
步进电机的位置控制与速度控制

定华雷达仪表学堂:不适合安装雷达物位计的三个位置
BLDC无位置传感器控制方式介绍
开启电子革命:HRPM霍尔效应旋转位置传感器深度解析
探索HRPS霍尔效应旋转位置传感器:工业与交通领域的理想之选
PIHER PSRC - 2P非接触式角位置传感器:工业与车辆领域的理想之选
自动驾驶汽车如何确定自己的位置和所在车道?

DBC解析:信号位置与物理值计算

CW32电机控制基础——无感BLDC的转子位置检测
集成MT6816磁性角度编码器实现伺服电机紧凑型非接触位置传感
集成 MT6835 非接触磁性编码器:工业机器人与车辆系统位置传感的稳健之选
三坐标测量技术解析:从基础原理到斜孔测量难点突破
三坐标测量技术解析:从基础原理到斜孔测量难点突破



评论