 机器人药丸可通过粘液保护胃肠道
机器人药丸可通过粘液保护胃肠道

粘液在保护身体免受伤害、防止潜在危险物质进入胃肠系统方面发挥着关键作用。但这也使得口服某些药物,包括胰岛素是几乎不可能的。这意味着糖尿病患者必须定期注射胰岛素,当然这会有些不方便,可能会导致糖尿病患者错过准确服药时间。
麻省理工学院的研究人员想找到一种解决这个问题的方法,于是他们发明了一种机器人药丸,叫做RoboCap,它可以像钻头一样穿过黏液保护胃肠道。在《科学机器人学》上发表的一项研究中,他们在猪身上测试了这项发明,发现它能有效地让猪的身体吸收药物,包括胰岛素和静脉注射抗生素。虽然这项研究是初步的,但总有一天,它会使许多疾病的治疗变得更容易、更方便。
麻省理工学院科赫综合癌症研究所博士后研究员、哈佛大学研究员协会(Society of Fellows at Harvard University)初级研究员Shriya Srinivasan表示:“我们看到的结果可以应用于任何药物。”Srinivasan是《科学机器人》论文的主要作者。
RoboCap的工作原理
RoboCap有几个部分可以让它到达正确的位置并穿透粘液。整个药丸都涂有一层凝胶状物质,能够对pH值作出反应,只有在到达小肠后,才容易吞咽和激活。一旦到达那里,涂层溶解,即关闭药丸的电路并触发其机械部件。药丸的一侧是一个附在内部马达上的重物,当马达启动时,它会使药丸开始振动和旋转。RoboCap会穿过小肠内的粘液,最终将药物沉积在药丸的另一侧。
为了有效地钻过粘液,药丸使用了表面特征,如受鱼雷鳍启发的螺旋涡轮鳍和螺旋槽。它还涂有小钉,以帮助“刷”掉粘液,类似于牙刷的工作原理。Srinivasan说,她还受到了一段叫做“鼹鼠”的隧道掘进机的在线视频的启发,这种机器可以穿过岩石和泥土,钻出狭窄的通道。
研究人员用两种不同的药物测试了他们的发明:胰岛素和万古霉素,这是一种IV抗生素。他们在猪小肠的切除部分上测试了这种方法。这使他们能够测量在粘膜层上方注射的药物有多少到达了另一侧。研究人员还在活猪身上测试了RoboCap,在这两种情况下都将RoboCaps与没有钻孔机制的药物或对照药进行了比较。
Srinivasan说:“当我们将对照组与RoboCap进行比较时,实际到达血流的药物量增加了20-40倍。”
潜在应用
在完成药物递送后,RoboCap通过消化系统自行离开身体。研究人员没有发现任何证据表明,避孕药对猪的胃肠道系统造成任何损害,频繁的粘液分泌意味着钻孔动作对感染风险或身体保护自身的能力没有持久影响。
Srinivasan说,这项研究和技术都有局限性。目前尚不清楚一旦RoboCap离开身体,如何处置它。这项研究也没有检查药物的剂量,或药物如何被装入药丸内。该研究还仅比较了口服药物的释放情况;例如,它没有像正常情况那样,比较RoboCap与胰岛素注射时,有多少胰岛素进入血液。很明显,这项发明还远未可用于人类;它必须经过广泛的开发,才能大规模生产,并需要经过临床试验过程。
使用这样的机械方法比使用化学方法来完成药物的口服递送的方法具有许多优点,其中指示了药物的摄取路径。但仅仅因为这种方法可以用于多种药物并不意味着它一定实用。圣母大学化学和生物分子工程系教授Matthew Webber说:“我认为,目前对胰岛素定价的一些政治和社会压力可能会导致这种特殊的交付方式有点过于昂贵。”
Webber确实认为这种方法对其他药物有潜在的用处,比如癌症的抗体治疗,这种通常需要在医院里静脉注射。不管是否有可能口服给药,Webber仍旧表示这是一个创新的想法。
“这方面的科学是超级酷的,”他说,“我认为有很多……非常复杂和详细的工程,可以用来制造这样的东西。”
-
电路
+关注
关注
173文章
6063浏览量
177469 -
机器人
+关注
关注
213文章
30580浏览量
219525
原文标题:机器人胶囊(Robopill)通过粘液可将药物送入消化道
文章出处:【微信号:IEEE_China,微信公众号:IEEE电气电子工程师】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
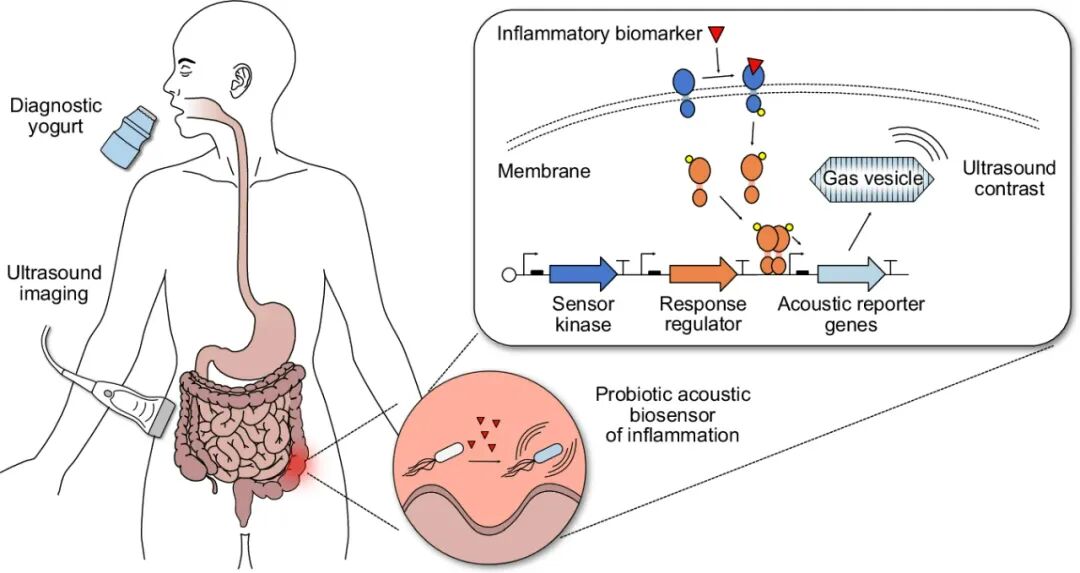
加州理工学院: 益生菌声学生物传感器用于实现肠道炎症的无创成像
工业机器人的特点
盘点#机器人开发平台
详细介绍机场智能指路机器人的工作原理
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
爱普生可编程晶振SG8201CJ和SG8200CJ在胃镜机器人领域发挥重要作用






 工商网监
工商网监
评论