 关于PCL和Ceres Solver的安装
关于PCL和Ceres Solver的安装

众所周知最近在和工友搞SLAM,好家伙工友M1版的MAC+虚拟机跑ROS(其实一开始在英伟达的XAVIER上面跑来着,无奈空间不够,寄了),总之就是大概一周内都在调试(断断续续的那种),今天是工作日,我也实在看不下去了,也投入到了这个令人头秃的工作中,事实证明这个东西是真的熬人。
一开始跑的FAST-LIO,是雷达+IMU的SLAM框架,在最后一步的雷达和IMU的配准的时候有一些超过了我和工友能力范围的步骤(搞不几米了),虽然这样,但是忙了这么久了,有点难过,后来找了找有没有不用IMU的框架,然后就有了这篇文章,但是我有个疑惑的地方,我个人感觉MID-40雷达自己是带有IMU的,因为在驱动里面我找到了这样的开关,以及在建图的过程中下面车辆微小的动作也可以在图中有体现,我觉得应该是有IMU的。

emmmm,没有IMU,无妨我们有外置的,有空加一个上去
这篇文章主要是展示使用,安装过程中的一些坑也会说明。
先看看结果:
Loam-Livox是用于Livox 激光雷达的稳健、低漂移和实时里程计和测绘软件包,是专为大规模工业用途而设计的低成本和高性能激光雷达。
该LOAM 算法仅使用一个 Livox Mid-40 单元,没有融合其他传感器如 IMU、GPS 或摄像头。通过运动补偿机制进行连续扫描匹配,从而实现 LiDAR位姿的实时解算(即测距)。有了LiDAR位姿, 所有LiDAR测量的点云就可以投影到同一个全局坐标系中, 得到环境的三维地图。为提升算法性能和可靠性,一系列核心问题得以解决,包括有限视场下的特征提取和筛选、杂点剔除、移动物体过滤以及帧内运动补偿。该算法的测距和建图部分均可以同时在MacBook上以 20 Hz 的频率实时运行(工友的本子没有跑起来)。
官方测试的是Ubuntu16,18的版本(64bit),我这里使用的是20.04.
记得安装的时候替换里面的XXX,第二个是我的安装命令。
sudo apt-get install ros-XXX-cv-bridge ros-XXX-tf ros-XXX-message-filters ros-XXX-image-transport
sudo apt-get install ros-noetic-cv-bridge ros-noetic-tf ros-noetic-message-filters ros-noetic-image-transport
关于PCL和Ceres Solver的安装,你可以看下篇文章,注意PCL需要安装1.9的版本。
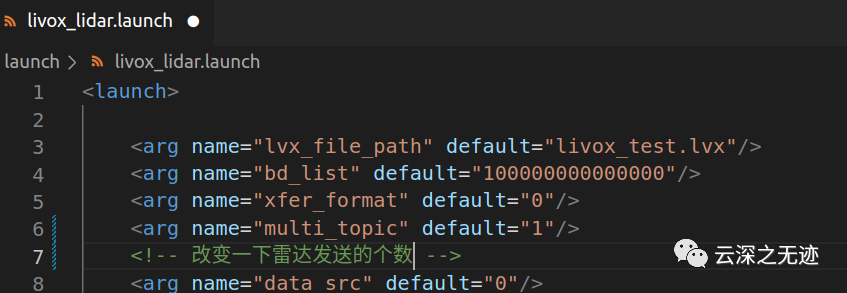
如果你使用的是MID-100的高端货,需要在ROS的驱动包里面设置这个参数
cd ~/xxxx/src
git clone https://github.com/hku-mars/loam_livox.git
cd ../
catkin_make
source ~/xxxx/devel/setup.bash
xxxx是你自己的目录,按部就班的执行就好
那么我敢打包票,你会遇到一个Opencv的报错问题,无妨~我们已经解决了。
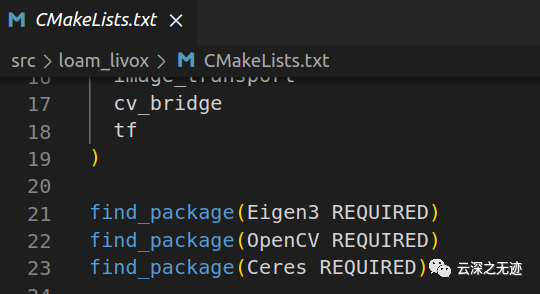
有的人说要把这里的OpenCV版本号改了,其实不用
在源码的文件夹里面修改这个文件为
#include
其实就是opencvAPI的变动
cap.set(cv::CAP_PROP_SETTINGS, 1); // opens camera properties dialog
cap.set(cv::CAP_PROP_FRAME_WIDTH, 320);
cap.set(cv::CAP_PROP_FRAME_HEIGHT, 240);
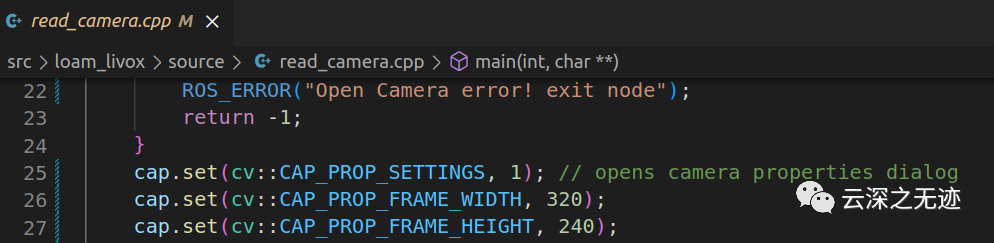
这个里面修改三个文件,此时保存编译
至少里面的这些东西都不报错,就是都安装OK
当然下面给的是安装OpenCV的命令:
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev sudo apt-get install libgtk2.0-dev sudo apt-get install pkg-config sudo apt install build-essential cmake git pkg-config libgtk-3-dev libavcodec-dev libavformat-dev libswscale-dev libv4l-dev libxvidcore-dev libx264-dev libjpeg-dev libpng-dev libtiff-dev gfortran openexr libatlas-base-dev python3-dev python3-numpy libtbb2 libtbb-dev libdc1394-22-dev libopenexr-dev libgstreamer-plugins-base1.0-devlibgstreamer1.0-dev
mkdir ~/opencv_build && cd ~/opencv_build git clone https://github.com/opencv/opencv.git gitclonehttps://github.com/opencv/opencv_contrib.git
cd ~/opencv_build/opencv mkdir-pbuild&&cdbuild
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D INSTALL_C_EXAMPLES=ON -D INSTALL_PYTHON_EXAMPLES=ON -D OPENCV_GENERATE_PKGCONFIG=ON -D OPENCV_EXTRA_MODULES_PATH=~/opencv_build/opencv_contrib/modules -DBUILD_EXAMPLES=ON..
make-j8
sudomakeinstall
安装
pkg-config--modversionopencv4
验证
roslaunch loam_livox livox.launch roslaunch livox_ros_driver livox_lidar.launch
先运行第一个节点,启动接收和建图的线程,然后第一个,雷达开始启动。
建图的时候,室内还是算了,雷达一扫百米,室内实在是憋屈啊。在室外测试,因为雷达本身的范围就很大了,这里也不就建议不停的旋转雷达,可以多绕一圈来补充特征点,以及就是要匀速走直线,拐弯也要平缓,不能速度突变。
-
传感器
+关注
关注
2578文章
55846浏览量
795556 -
摄像头
+关注
关注
61文章
5133浏览量
103645 -
雷达
+关注
关注
52文章
3443浏览量
124767 -
PCL
+关注
关注
1文章
38浏览量
14267
原文标题:港大Loam-纯雷达建图
文章出处:【微信号:TT1827652464,微信公众号:云深之无迹】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
Clarity 3D Solver 与 Celsius Thermal Solver的算法解密
【Toybrick RK3399Pro AI开发板试用体验】在Toybrick RK3399Pro编译安装cartographer
关于232的NCL,PCL的疑问
PCL点云库介绍及项目配置方式
使用imu_utils工具生成IMU的Allan方差标定曲线 精选资料推荐
PCL应用示例

Cadence EMX 3D Planar Solver 通过 Samsung Foundry 8nm LPP 工艺技术认证

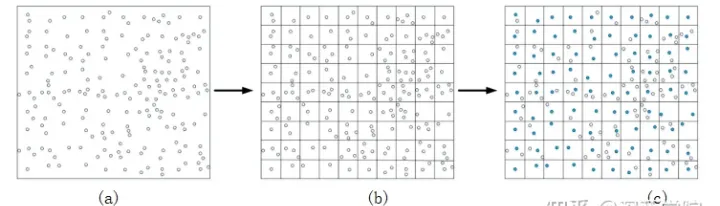
PCL中基础下采样介绍



评论