 如何在 Petalinux 下定位 decice-tree 错误
如何在 Petalinux 下定位 decice-tree 错误

今天邀请到赛灵思专家和大家分享下如何在Petalinux下定位decice-tree错误的一些技巧。
首先我们来了解下 Petalinux 工程中 device-tree 的文件位置:
工具自动生成的device-tree文件位于
components/plnx_workspace/device-tree/device-tree,
该文件夹下的文件请勿自行修改,供用户编辑的 device-tree 文件位于
project-spec/meta-user/recipes-bsp/device-tree/files
对于大部分错误,通过 petalinux 工具的 error log 已经足够定位错误类型和位置。比如下面,
ERROR: device-tree-xilinx-v2020.1+gitAUTOINC+f725aaecff-r0do_compile: Error executing a python function inexec_python_func() autogenerated:
The stack trace of python calls that resulted in this exception/failure was
……
Subprocess output:
/tmp/xilinx-zcu102-2020.2-2021.02.08-01.47.20-87H/work/zynqmp_generic-xilinx-linux/device-tree/xilinx-v2020.1+gitAUTOINC+f725aaecff-r0/system-user.dtsi ERROR (duplicate_label): /ethernet@ff0b0000: Duplicate label 'gem0' on /ethernet@ff0b0000 and /amba/ethernet@ff0b0000
ERROR: Input tree has errors, aborting (use -f to force output)
ERROR: Logfile of failure stored in: /tmp/xilinx-zcu102-2020.2-2021.02.08-01.47.20-87H/work/zynqmp_generic-xilinx-linux/device-tree/xilinx-v2020.1+gitAUTOINC+f725aaecff-r0/temp/log.do_compile.62492
ERROR: Task (/group/bcapps/chaoz/plnx_zcu102_bsp_2020p2/xilinx-zcu102-2020.2/components/yocto/layers/meta-xilinx/meta-xilinx-bsp/recipes-bsp/device-tree/device-tree.bb:do_compile) failed with exit code '1'
NOTE: Tasks Summary: Attempted 3410 tasks of which 3402 didn't need to be rerun and 1 failed.
……
ERROR: Failed to build project
实际的 log 会非常冗长,我们在其中仔细找 dtc 的报错,其中提示 “Duplicate label 'gem0' on /ethernet@ff0b0000 and /amba/ethernet@ff0b0000“,说明 ‘gem0’ 的 label 在多个地方重复定义了。而且报错也提示了错误的位置为“…/system-user.dtsi:3.31-15.9”,我们根据错误提示去删除重复的 gem0定义即可。
有时候通过 petalinux 的 log 无法定位到具体错误位置,这时候我们可以通过在 Petalinux 之外手动编译 device tree文件的方式来获得更具体的错误信息。手动编译需要用到dtc (Devicetree Compiler), 如果你的机器上还没有 dtc 的话可以从 linux-xlnx/scripts/dtc 位置找到源码并执行 make 来编译生成 dtc 工具。
如前所述 Petalinux 下的 device tree 分布在两个位置,我们先把所有 dts/dtsi 文件都拷贝到单独工作目录中方便后续手动编译。
设备树的顶层为 system-top.dts, 并引用了很多其它 dtsi 文件,类似 C 语言中的 include 机制。可以先利用 gcc 来进行预处理,将分立的 dts/dtsi 文件汇总到一个文件中,
gcc-I
再用 dtc 来编译设备树文件。
dtc-Idts-Odtb-oout.dtb
接下来根据 dtc 的报错信息,就可以容易地定位到错误类型和位置。
原文标题:开发者分享 | 如何在 Petalinux 下定位 decice-tree 错误
文章出处:【微信公众号:FPGA之家】欢迎添加关注!文章转载请注明出处。
-
设备
+关注
关注
2文章
4887浏览量
73858 -
源码
+关注
关注
8文章
689浏览量
31517 -
编译
+关注
关注
0文章
696浏览量
35287
发布评论请先 登录
FPGA技术教程Linux开发:Petalinux安装
CAN总线报错看不懂?5种错误帧+5步排查法一次讲清

如何在 Vision Five 2 上安装 python 库?
如何在 VF2 上编译东西?
Ubuntu 23.10 -> 错误:重新定位溢出怎么解决?
Linux 6.8 内核 - 错误:找不到 cmdline 扁平化设备树怎么解决?

泡沫起升仪步进/伺服电机细分驱动技术:实现冲程毫米级定位的电子方案

GPS定位和地磁定位有什么区别?

`lv_obj_tree.h` 在 **LVGL v9** 中的位置和作用

Cortex-M0+处理器的HardFault错误介绍
电商API常见错误排查指南:避免集成陷阱

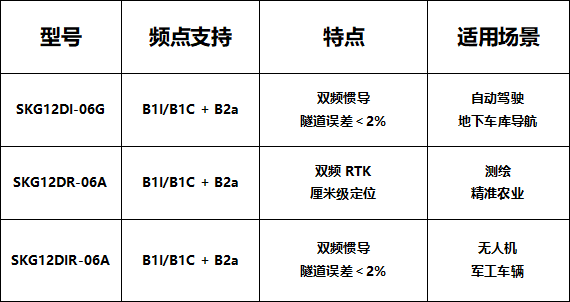
北斗三号兼容升级如何选择新一代北斗高精度定位模组
如何验证CAN控制器的错误响应机制?




评论