 服务机器人技术关键点:TOF、IMU、NTC
服务机器人技术关键点:TOF、IMU、NTC

任何种类的机器人对传感器需求都是巨大的,各类不同的传感器组合构成机器人的五官,为其提供智能化感知。检测位置的运动传感器、检测物料的气压传感器、检测障碍物的超声波TOF传感器、检测室内环境的气体传感器和温度传感器、检测电池电流的电流传感器、检测角度和位置的霍尔传感器和磁阻传感器等等。从感知外部到感知内部,这些传感器将机器人整个系统完全覆盖起来。
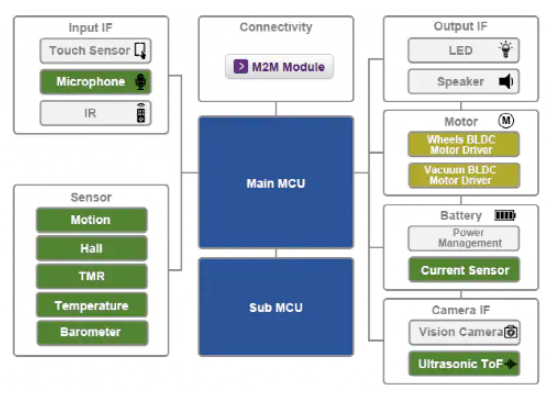
(机器人配置示意图,TDK)
超声波ToF的地面类型、高低坡以及障碍物检测
机器人传感上,可以用于障碍物检测、高低坡检测、地面检测的方法有很多。此前我们也讲过很多应用在这个方向上的传感方法,但今天我们在地面类型、高低坡以及障碍物检测上看一看超声波ToF。
众所周知,基于超声波的传感用在机器人应用上最受欢迎的就是其在任何照明条件下都可工作,包括全日光条件,尤其是在感知中能够进行不受受测物体颜色和光学透明度影响的距离测量,精确最高可到毫米级,这一特性是很多传感无法做到的。
超声波ToF传感器利用超声波换能器芯片发射超声波脉冲,然后收听从位于传感器视场中的目标返回的回波。通过计算超声波飞行时间(ToF),传感器可以确定某一物体相对于器件的位置。这里,超声波换能器芯片是重中之重。MEMS工艺下的换能器芯片已经往微型和低功耗在靠拢。如果只是单一的超声波信号处理,显然是不足以同时完成地面类型、高低坡以及障碍物的检测。为了实现对多种超声波信号处理的能力,单单MEMS超声波换能器是不够的,需要在混合信号CMOS ASIC上结合MEMS超声波换能器和DSP,以对多种不同检测应用上的信号进行处理。
这一类超声波ToF传感需要实现很宽的FoV,感应距离相对来说不是那么关键,超声波的探测距离本来就不是其特长,能够实现几米左右的探测即可。FoV则一定要够宽,允许同时对FoV中的多个物体进行覆盖。在地面类型的检测上使用超声波ToF可以通过反射超声波信号的平均振幅来确定目标表面是“硬的”还是“软的”,在扫地机器人上这种应用颇多;障碍物存在检测这一类标准的应用无需赘述,任何一个传感器都能进行;高低坡的检测则通常会需要多个超声波ToF进行配合。
高精度IMU的校准补偿
IMU也是服务机器人运动传感的必备,高性能6轴是选型里最先考虑的选择。在实际使用过程中,虽然高性能的IMU在分辨率、采样精确度、稳定性、噪声密度上已经足够优秀,但对IMU的弱点进行补偿是必不可少的。这些弱点主要存在于对IMU的校准上。
首先是在机器人启动后,对机器人IMU进行的偏置校准,目前一般都讲究可编程的控制,能够实现自动或手动偏置校正是最好的,从软件层面消除初始误差的产生。随时间和温度变化,IMU需要动态校准随时间变化的传感器偏差漂移,并且时刻对温度进行动态校准,这也是一个实时补足的地方。精准的运动传感肯定建立在实时的校准上,每个传感器都有自己的动态补偿公式,大多数IMU芯片厂商会把所有必要的运动检测和校准在生产过程中完成,减少再集成的时间成本。
在IMU实际使用中的数据融合处理上,完全看各厂商的校准能力,对偏置漂移的校准能力决定了机器人能否对运动方向做出正确的跟踪与预估。对其他任何可能需要的校准,主机都必须能随时提供机器人状态作为输入给校准系统,同时处理该输入数据的速率必须要快,能在极短的时间内完成响应,这对电机MCU或者说电机控制单元也是一个考验。
NTC取舍
NTC热敏电阻芯片在检测温度上给予了机器人控制很大的支持,尤其是可接合的NTC芯片,在半导体器件用于给固定电池状态和机器人产品的电机控制器充电。这些NTC一般直接安装在模块中,监测半导体连接点的温度。功率型热敏电阻也会用来抑制浪涌。
NTC热敏电阻由于性价比高在温度传感上使用十分广泛,但它在极端温度下提供精度较低。而且热敏电阻是以热量形式散发能耗的,这会影响其测量精度。散发的热量取决于材料成分和流经器件的电流。如果对器件的灵敏度和精度要求较高,具有较低自热且传感器漂移小的NTC会更好。
另外在安装上,为了直接或间接地通过IGBT、电容器、机器人中的线圈等散热来监测温度,拧入式或旋入式传感器是更成熟的方法,能通过拧入式外壳或金属标签形成更好的热耦合。
写在最后
机器人传感太多,这里只选取了几个方向。机器人感知能力在很大程度上取决于传感系统提供关键的数据,结合ML和AI后,机器人感知也开始向更加智能的方向进化。
-
传感器
+关注
关注
2574文章
54481浏览量
786686 -
机器人
+关注
关注
213文章
30654浏览量
219911 -
TOF
+关注
关注
9文章
522浏览量
38195
发布评论请先 登录
IMU+多相机高速联合自动标定方案
驱动服务机器人创新的核心技术







 工商网监
工商网监
评论