 使用VPLC系列机器视觉运动控制一体机对图像进行ROI创建
使用VPLC系列机器视觉运动控制一体机对图像进行ROI创建


背景
ROI即感兴趣区域是我们机器视觉图像处理经常使用的基本功能。在实际的视觉检测项目过程中,我们将待检测目标的检测特征框选出来的区域称作ROI(感兴趣区域)。使用ROI功能我们可以针对性的处理目标特征,提升检测效率和准确性,同时还可以过滤掉环境中引入的干扰因素。
ROI创建有以下两个优点:
1.可缩减处理图像的区域范围,减少图像像素处理量,缩短图像处理时间,提升效率。
2.基准模板。框选检测目标特征后可过滤掉干扰因素,提高检测方案的准确度。
在采集到一张图像后,即可在图像上框选感兴趣的区域创建ROI。
常见的ROI类型有:矩形、旋转矩形、圆形、圆环。本期课程以创建矩形ROI为例。

在上期课程中,我们讲述了如何使用 VPLC系列机器视觉运动控制一体机进行图像开闭运算的课程。本期课程正运动小助手给大家分享一下VPLC系列机器视觉运动控制一体机对图像进行ROI创建的课程。
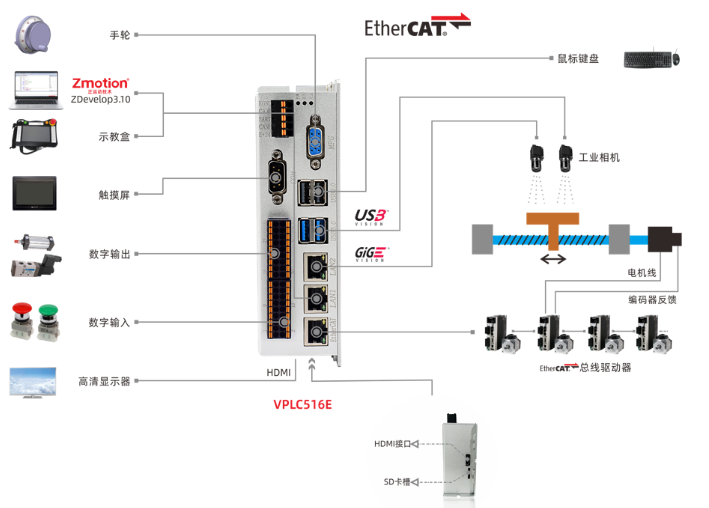
01VPLC控制器
(一)VPLC516E构架图
(二)课前准备
1.电脑一台,安装ZDevelop3.10以上版本软件
2.VPLC516E一台
3.24V直流电源一个
4.网线一根
5.WinSCP软件
6.电线若干
02课程主要使用的指令
1.SET_REDRAW -- 指定区域重新绘制(需要在自定义元件的刷新函数中使用)
SET_REDRAW ([x, y, width, height])
参数:
X,Y:显示区域左上角的坐X、Y坐标位置
width,height:区域宽和高
2.MOUSE_SCAN -- 扫描触摸按下动作
MOUSE_SCAN (num)
参数:
num:触摸对应的位置的X、Y坐标分别存储在table(num), table(num+1)
3.ZV_HMIADJRECT -- 矩形ROI调整
hittype = ZV_HMIADJRECT(mousex,mousey,tab_rect,hittype)
参数:
mousex:HMI 控件的鼠标X坐标
mousey:HMI 控件的鼠标Y坐标
tab_rect:保存矩形ROI参数的TABLE索引,依次为ltx、lty、 rbx、rby,即分别为正矩形左上角坐标ltx、lty,右下角坐标rbx、 rby,对应的是hmi控件坐标系下的值,调整后的值将直接替换调整前的值。
hittype:指定击中区域编号,表示指令要调整的矩形对应部分,为-1时表示无效编号,不对矩形做调整;为有效编号时则调整矩形对应的部分。按下鼠标左键则返回当前选中的击中区域编号,按住鼠标左键不放再移动鼠标表示在不断地在调整指定编号所对应的矩形部分,此时返回的击中区域编号与输入的编号一致。
返回值:
hittype:根据鼠标点击位置计算的新的击中区域编号
4.MOUSE_STATE -- 读取触摸状态
MOUSE_STATE (num)
参数:
num:触摸对应的位置的 X,Y 坐标分别存储在 table(num), table(num+1)
5.HMI_CONTROLSIZEX -- 获取控件宽度
HMI_CONTROLSIZEX ([winid, controlid])
参数:
winid:HMI文件里面窗口编号
controlid:元件编号,缺省为当前自定义元件宽度
6.HMI_CONTROLSIZEY -- 获取控件高度
HMI_CONTROLSIZEX ([winid, controlid])
参数:
winid:HMI文件里面窗口编号
controlid:元件编号,缺省为当前自定义元件高度
7.ZV_POSTOIMG -- HMI控件坐标转图像坐标
ZV_POSTOIMG(latch_id,num,tab_in_id,tab_out_id)
参数:
latch_id:锁存通道号
num:坐标点数量
tab_in_id:存放转换前坐标点的TABLE索引,num个坐标点数据依次为x、y、x、y......
tab_out_id:存放转换后坐标点的TABLE索引
8.DRAWRECT --绘制矩形
DRAWRECT(x1,y1,x2,y2)
参数:
x1,y1:显示区域左上角的坐标位置
x2,y2:显示区域右下角的坐标位置
03软件实现
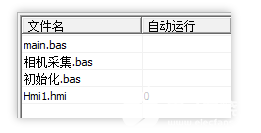
1.打开ZDevelop软件:新建名称为“创建ROI.zpj”项目→新建“HMI”文件→新建“main.bas”文件(用于编写界面响应函数、并开启HMI自动运行任务)→新建“相机采集.bas”文件(用于实现相机采集功能)→新建“初始化.bas”文件(用于初始化测量参数)→文件添加到项目。
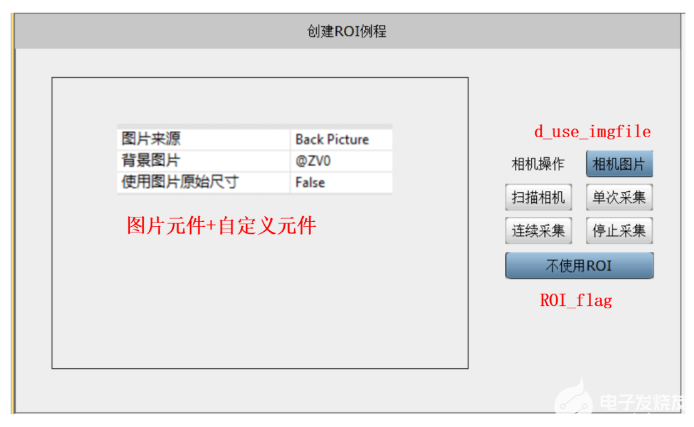
2.设计HMI主界面和关联它的控件变量。
3.编写实现对图像进行ROI创建的执行函数。
'ROI创建的执行函数
GLOBAL SUB update_roi()
local is_redraw,lv_i
SET_REDRAW '全局绘制
if ROI_flag=1 THEN
if mouse_scan(11) = 1 then '扫描鼠标按下操作
hit_pos = ZV_HMIADJRECT(table(11), table(12), 25, -1) '获取调整区域标志
is_redraw = 1 '将绘图标志置1
endif
if mouse_scan(11) = -1 then '扫描鼠标松开操作
ZV_HMIADJRECT(table(11), table(12), 25, hit_pos) '调整ROI的位置
is_redraw = 1 '将绘图标志置1
endif
if (MOUSE_state(11)) then
ZV_HMIADJRECT(table(11), table(12), 25, hit_pos) '调整ROI的位置
is_redraw = 1 '将绘图标志置1
endif
if (TABLE(25) >= 0) AND (TABLE(27) <= and="">= 0) AND (TABLE(28) <= HMI_CONTROLSIZEY(10,2)) THEN
TABLE(30) = TABLE(25) ' CX
TABLE(31) = TABLE(26) ' CY
TABLE(32) = TABLE(27) ' Width
TABLE(33) = TABLE(28) ' Height
ELSEIF (TABLE(25) < 0) OR (table(27) > HMI_CONTROLSIZEX(10,2)) OR (table(26) < 0) OR (table(28) > HMI_CONTROLSIZEY(10,2)) THEN
TABLE(25) = TABLE(30)
TABLE(26) = TABLE(31)
TABLE(27) = TABLE(32)
TABLE(28) = TABLE(33)
endif
if (1 = is_redraw) then
is_redraw = 0 '将绘图标志置0
ZV_POSTOIMG(0, 2, 25, 15)'将ROI的控件坐标数据转到图像坐标数据
d_roi_rect(0) = TABLE(15)'将ROI的图像坐标数据赋值给定义的变量
d_roi_rect(1) = TABLE(16)
d_roi_rect(2) = table(17)
d_roi_rect(3) = table(18)
SET_REDRAW '全局绘制
endif
endif
ENDSUB
'ROI区域更新后实时绘制ROI区域
GLOBAL SUB draw_roi()
if ROI_flag= 1 THEN
SET_COLOR(rgb(0,255,0)) '设置绘制时画笔的颜色为绿色
'绘制矩形
DRAWRECT(table(25),table(26),table(27),table(28))
'绘制十字标
DRAWLINE((table(25)+table(27))/2-5,(table(28)+table(26))/2,(table(25)+table(27))/2+5,(table(28)+table(26))/2)
DRAWLINE((table(25)+table(27))/2,(table(28)+table(26))/2-5,(table(25)+table(27))/2,(table(28)+table(26))/2+5)
endif
END SUB
本次,正运动技术【机器视觉运动控制一体机小课堂】三分钟对图像进行ROI创建,就分享到这里。
审核编辑:汤梓红
-
机器视觉
+关注
关注
166文章
4857浏览量
126841 -
一体机
+关注
关注
0文章
1352浏览量
34936 -
运动控制
+关注
关注
5文章
845浏览量
34743
发布评论请先 登录
开环步进一体机和闭环步进一体机有什么本质区别?


慕尼黑上海电子设备展,正运动机器视觉运动控制一体机应用预览(三)

工控一体机在全自动高速贴片机中的应用


Nullmax MaxDrive Basic智能前视一体机及小域控方案

工业一体机针对工业机器视觉需求开发的一种集成化系统被广泛应用



评论