 详解毫米波雷达与激光雷达的区别
详解毫米波雷达与激光雷达的区别

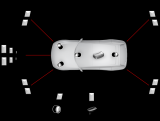
车载角雷达可以实现盲点检测(BSD)、侧向来车警示 (CTA)、车道变换辅助 (LCA)等功能,在辅助驾驶场景中具有重要应用。下面以 TI 公司的 AWR1843 雷达为例介绍车载角雷达的工作原理。
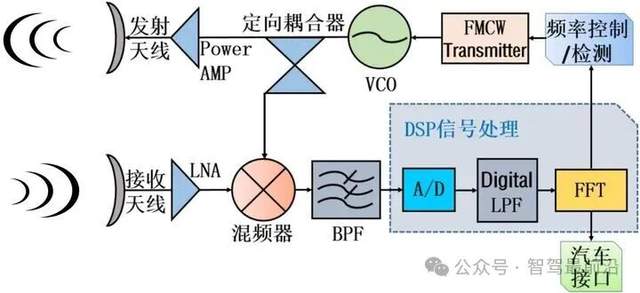
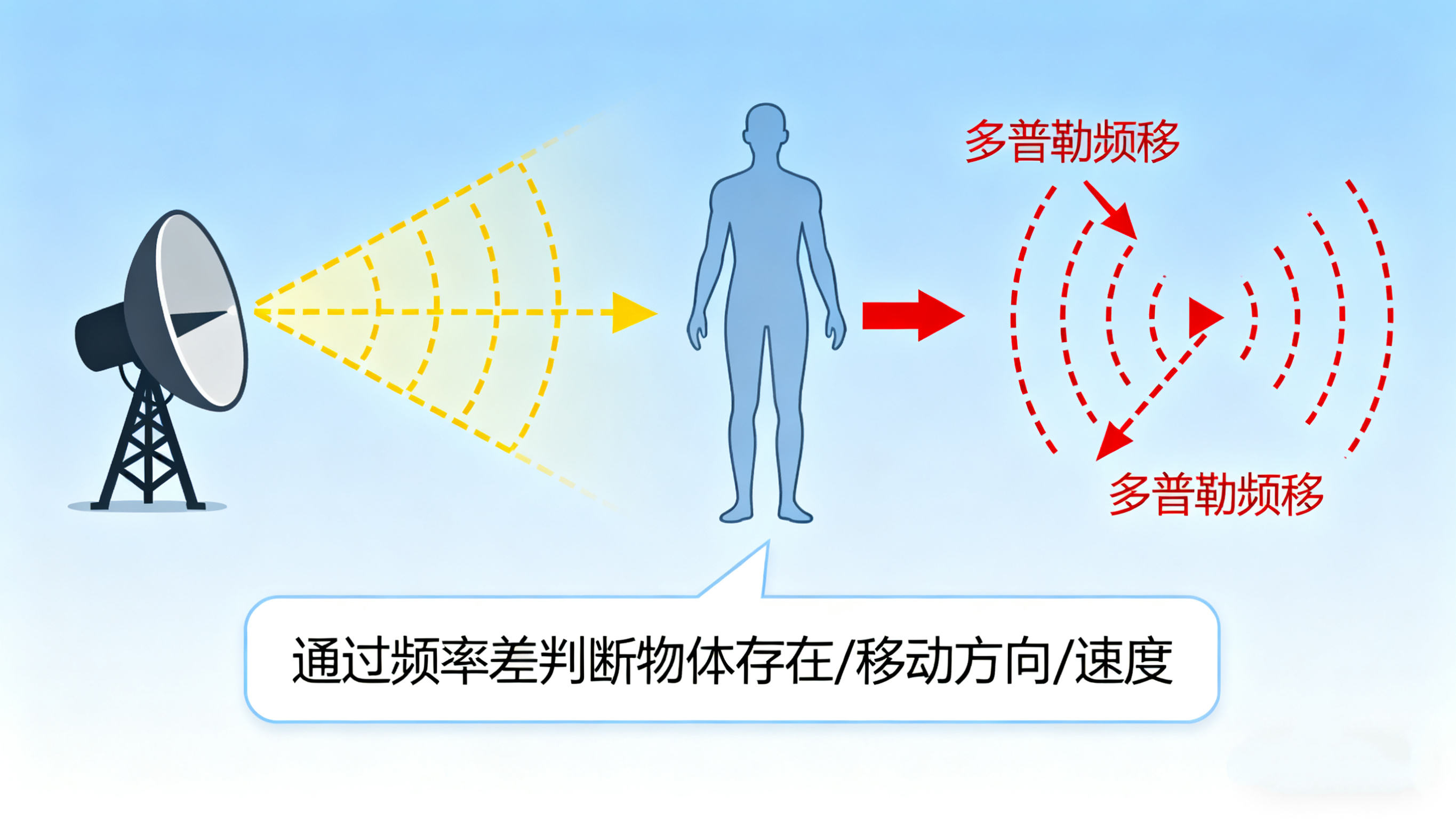
调频连续波(FMCW)雷达可以准确测量障碍物和其他车辆的距离和相对速度,是汽车安全应用的重要传感器。雷达相对于摄像头和基于激光雷达的系统的一个重要优势是雷达相对不易受环境条件的影响(例如雨水、灰尘、烟雾和眩光的影响)。
FMCW 雷达传输 Chirp(线性调频)信号并处理其反射,因而可以在完全黑暗或明亮的日光下工作。与超声波相比,雷达通常具有更长的射程,并且雷达信号的传输时间远小于超声波信号的传输时间。因此,雷达可以更准确地报告动态场景。
毫米波雷达与激光雷达区别
从工作原理上来讲,激光雷达(LIDAR,light detection and ranging)和毫米波雷达(RADAR,radio detection and ranging)基本类似,都是利用回波成像来显示被探测物体。
不过激光雷达发射的电磁波是一条直线,主要以光粒子发射为主要方法,而毫米波雷达发射出去的电磁波是一个锥状的波束,以电磁辐射为主。
角雷达的工作原理
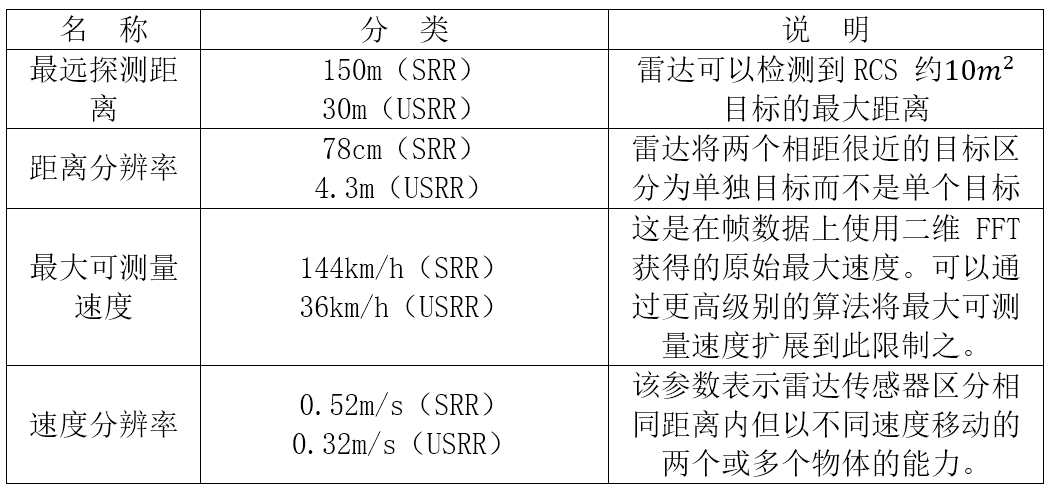
角雷达设计应用于超短程雷达(USRR)和短程雷达(SRR)。在 140km/h 的行驶条件下,AWR1843 雷达能够检测两百多个个物体,并在 150 米的距离处跟踪二十多个物体。
在角雷达应用中,AWR1843 被配置为多模雷达,意味着它在跟踪 150 m 处的物体的同时,还可以在 30 m 处生成丰富的物体点云。通过设计增益比更高的天线,可以实现超过 150 m 的范围。
由于该设计是多模雷达,因此有两组不同的规格。第一个是可用于BSD、LCA和TJA,对应实现最大射程 150m 的配置(SRR)。第二个是对应于 30m 配置的 USRR 规范。
AWR1843 雷达简介
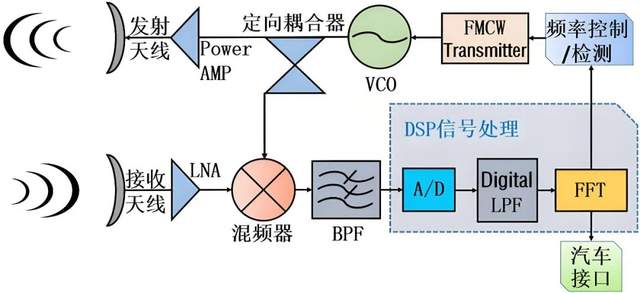
AWR1843 是一款集成的单芯片调频连续波(FMCW)传感器,能够在 76-81GHz 频段内工作。该器件采用 45nm CMOS 工艺构建,可在极小的外形尺寸内实现模拟和数字集成。
该传感器有四个接收器和三个带有闭环锁相环(PLL)的发射器。其还包括一个用于射频校准和安全监控的内置无线电处理器(BIST)。传感器设备支持 10MHz 的中频带宽和可重新配置的输出采样率。Arm Cortex R4F 和 TI 的 C674x DSP(定点和浮点)以及 2MB 片上 RAM 支持高级算法开发。
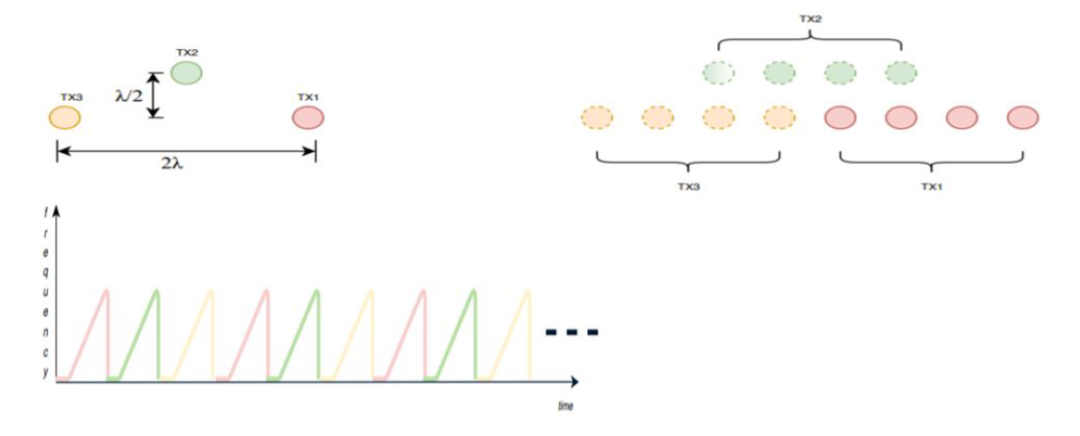
天线配置
角雷达使用四个接收器和三个发射器(两种不同Chirp配置)。第一种配置(SRR)使用简单的非 MIMO 配置,TX1、TX2 和 TX3同时传输。
第二种 USRR 使用时分复用MIMO配置(即转换 TX1、TX2 和 TX3 中交替发射 Chirp 信号)。该多输入多输出(MIMO)配置合成了一个由 12 个虚拟 RX 天线组成的阵,将角度分辨率提高了三倍(与单个 TX 配置相比)。
信号配置和系统性能
在对信号配置之前,我们先看看毫米波雷达的信号波形图。
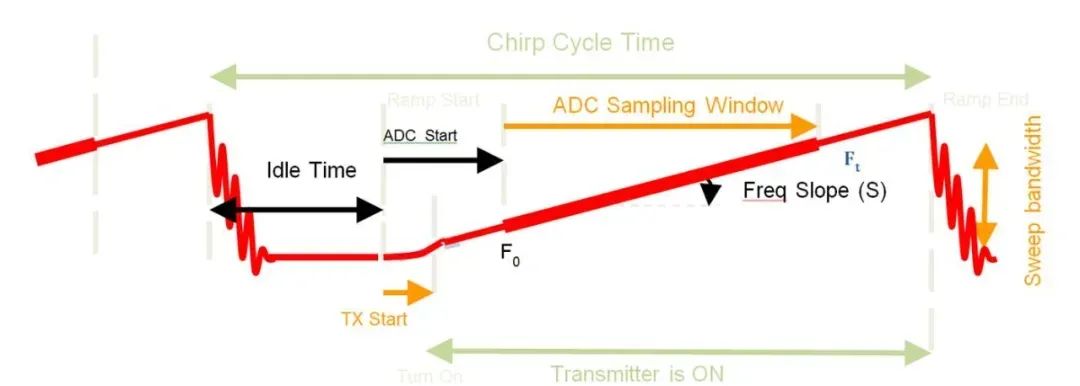
图中,
Idle Time:空闲时间,上一次 chirp 结束和下一次 chirp 开始之间的时间
Tx Start Time:发射开启时间,从斜坡开始到发射器打开的时间
ADC Start Time:ADC 启动时间,从斜坡开始到 ADC 开始对数据进行采集时间
Ramp End Time:斜坡结束时间,从斜坡开始到 chirp 持续上升结束的时间
AWR1843 雷达最大探测距离大约 150m,最大探测距离 。频率斜率 和最大距离 的乘积受限于可用的中频带宽 (AWR1843 为 10MHz)。因此,150m 的最大距离将 FMCW 信号的频率斜率锁定到大约 。
Chirp 信号周期的选择是距离分辨率 和最大速度 之间的权衡。该雷达使用约 0.78m 的距离分辨率,其原始最大速度约为 55km/h。通过高级算法,可以检测到的最大速度为 144km/h。
由于 L3 内存和 IF 带宽的限制,较远的距离会有较低的距离分辨率。解决这种权衡的一种有用技术是拥有多种配置,每种配置都针对特定的观看范围进行定制。例如,典型的 SRR 雷达在两种模式之间交替:低分辨率模式瞄准更大的最大距离(例如 150 米,分辨率为 0.75 米)和高分辨率模式瞄准更短的距离(例如 30 米,分辨率为 4 厘米)。
为了满足 USRR 和 SRR 的要求,角雷达设计利用了 AWR1843 器件的高级帧配置 API。此 API 允许构建由多个子帧组成的帧,每个子帧都被调整到特定的应用程序。
这些子帧中的每一个都被调整到一个应用程序。在 SRR 设计的情况下,使用了两个子帧。一个子帧专用于 USRR 中,另一个子帧专用于 SRR 中。
帧配置使用高级帧配置 API 生成两个单独的子帧-SRR 子帧以及 USRR 子帧。如下图所示。
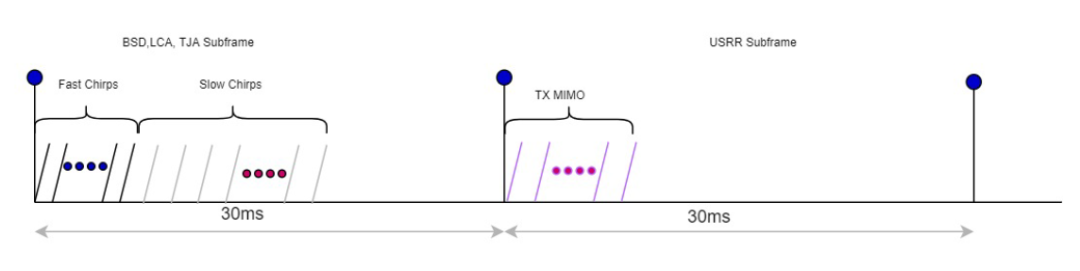
SRR 子帧由两种 Chirp 信号组成:快频信号和慢频信号。快频信号和慢频信号具有相同的斜率,但是,慢频信号的重复周期略高于快频信号。
与快频信号相比,在 2D-FFT 之后处理的慢频信号将具有较小的最大速度。快、慢频信号不交替。相反,快频信号重复一定次数,然后是慢频信号再次重复相同次数。
这种设计的目的是使用来自快频信号和慢频信号的两个独立的目标速度估计来生成具有更高最大速度估计。
USRR 子帧由三个交替的 Chirp 信号组成。每个 Chirp 使用 AWR1843 上可用的三个 TX 之一。该子帧的组合处理允许生成 8 个 Rx 天线的虚拟 Rx 阵列,因此具有更好的角分辨率(在方位角方向约为14.32度)。
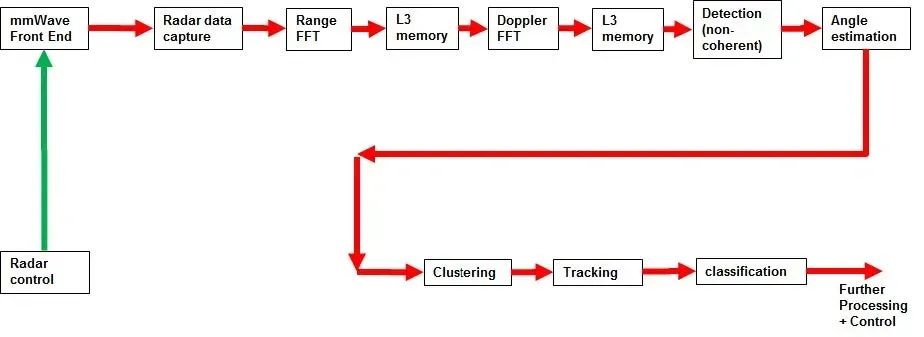
下图显示了到SRR应用程序的处理数据路径。
时间配置
下图显示了 Chirp 信号的时序和系统中的后续处理。
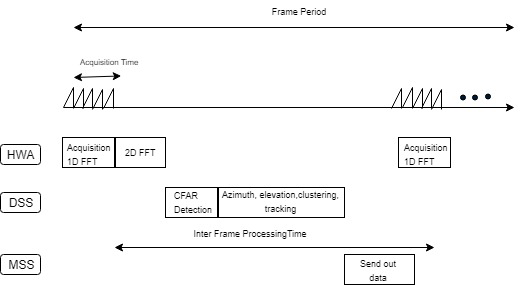
上图显示的数据路径处理,描述如下。
RF 前端由 BIST 子系统(BSS)配置,从各个前端通道获得的原始数据交由雷达硬件加速器(HWA)进行处理。
Chirp 期间的处理包括:
从 ADC 缓冲器获取来自多个接收天线的输入(对应于发射天线上的Chirp模式),硬件加速器执行的一维(距离)FFT 处理
通过增强型直接存储器访问(EDMA)将处理结果输到L3(三级缓存)RAM
在射频电路的空闲期间(即帧间处理时间)进行处理包括:
将 L3 RAM 中的一维输出作为输入,由硬件加速器执行的二维(速度)FFT 处理,在 L3 RAM 中生成(距离、速度)矩阵
将数据从 L3 RAM 输入 C674x DSP 以执行多普勒方向的CFAR检测,距离方向的 CFAR 检测使用 mmWave 库。其余的处理在 DSP 中继续进行
SRR子帧、多普勒和 USRR 子帧的峰值聚合(多普勒和距离)
到达方向(方位角)、俯仰角估计
基于目标的 SNR 和 2D-FFT 幅度进行额外修剪以避免地面杂波
在 SRR 和 USRR 中使用 DBSCAN 算法(基于密度的聚类算法)对检测到的目标进行聚类
使用 SRR 的扩展卡尔曼滤波器跟踪集群
EDMA配置
存储器之间的大规模数据移动是在 SRR 中使用 EDMA 完成的。使用 EDMA 比使用处理器移动数据更有效,因为当数据移动完成时,DSP 和 HWA 可以继续处理数据。必要的主要数据传输包括:
• 将距离 FFT 输出数据从 HWA 内存移动到 L3 内存
• 从 L3 获取 1D-FFT 数据到 HWA 输入缓冲区以执行 2D FFT
• 移动来自 L3 的 1D-FFT 数据进行角度估计(在2D-DFT之后)
ping-pong 工作机制
ping-pong 是一种数据传输技术,能够同时利用两个数据缓冲区达到数据连续传输的目的,从而提高数据传输速率。
由于单个缓冲区得到的数据在传输和处理中很容易被覆盖,而 ping-pong 缓冲区的方式能够总是保持一个缓冲区的数据被利用,另一个缓冲用于存储数据。即两个相同的对象作为缓冲区交替地被读和被写。
大多数 EDMA 都在 ping-pong 缓冲区上工作,这意味着当 ping 缓冲区被填充时,HWA 或 DSP 可以使用 pong 缓冲区进行处理。
内存分配
AWR1843具有以下存储器:
• L3 RAM 1024 kB
• L2 RAM 256 kB
• L1D RAM 32 kB
• L1P RAM 32 kB
R4F有512kB代码和数据RAM。在 SRR设计中,R4F仅用于配置和 UART/LVDS 通信。它的内存消耗和分配对设计没有影响。因此,DSP 是内存的主要消费者。
在 L1P RAM 和 L1D RAM可用的32KB中,L1P RAM 的一半(16 kB)和L1D RAM的一半(16 kB)保留用于代码和数据存储。剩余的用作缓存。
存储在 L1P 中的代码通常是 FFT 或 CFAR 等算法,或者是更复杂算法(如聚类和跟踪)的一些内核。将这些存储在 L1 中可以更快地执行这些内核,并在剩余内存中节省一些空间(在这种情况下,约为16kB)。
L1D 用作某些常用缓冲区的快速 RAM。L2 RAM 主要用于代码存储、数据暂存等。L3 RAM 主要用存储雷达立方体等。
处理雷达信号需要在处理阶段(3D-FFT、检测、角度估计等)的每个步骤中使用大量暂存缓冲区。通过覆盖暂存缓冲区可以有效地使用可用内存。在前一阶段使用的暂存缓冲区可以在当前阶段重新使用。
原文标题:车载毫米波角雷达简介
文章出处:【微信公众号:云脑智库】欢迎添加关注!文章转载请注明出处。
-
工作原理
+关注
关注
4文章
317浏览量
38679 -
激光雷达
+关注
关注
982文章
4539浏览量
197065 -
毫米波雷达
+关注
关注
109文章
1171浏览量
66387
原文标题:车载毫米波角雷达简介
文章出处:【微信号:CloudBrain-TT,微信公众号:云脑智库】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
毫米波雷达模块选型指南:国产替代进口的主流方案对比

雨雾天下毫米波雷达与激光雷达谁更具优势?
如何克服毫米波雷达点云稀疏问题?

雨雾天气,毫米波雷达表现为什么比激光雷达更好?
4D毫米波雷达为什么称为激光雷达的“替身”?
自动驾驶中毫米波雷达到底有何作用?

智能驾驶的“感官系统”:超声波雷达、毫米波雷达与激光雷达的协同之道

微波雷达和毫米波雷达有什么区别
【干货】一文带你读懂什么是毫米波雷达,了解毫米波雷达如何成为融合感知的关键一环

自动驾驶中超声波雷达、激光雷达、毫米波雷达有何区别?

恩智浦如何释放毫米波雷达的技术潜力

毫米波雷达在自动驾驶中有何关键作用?
自动驾驶毫米波雷达之间会相互干扰吗?

多毫米波雷达的实车连续测量应用案例



评论