 ABB机器人示教器入门-初级教学
ABB机器人示教器入门-初级教学

手动操作窗口示意图: 步骤1、将机器人操作模式选择器置于手动限速模式。步骤2、在ABB菜单中,单击手动操纵打开手动操纵窗口。
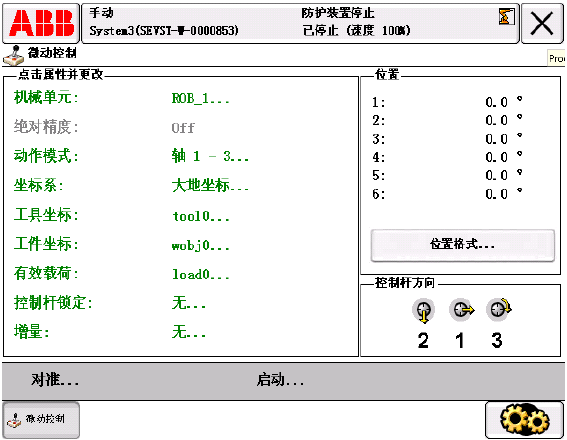 机械单元:步骤1、打开手动操纵窗口,并点击机械单元。步骤2、在弹出的窗口中选择需要进行控制的机械单元,然后点击确定。
机械单元:步骤1、打开手动操纵窗口,并点击机械单元。步骤2、在弹出的窗口中选择需要进行控制的机械单元,然后点击确定。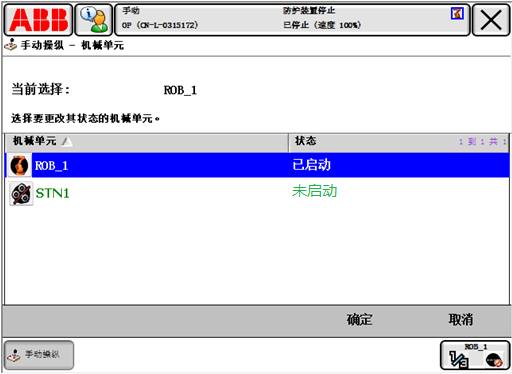 运动模式:步骤1、打开手动操纵窗口,并点击动作模式。步骤2、在弹出的窗口中选择所需模式,然后点击确定。
运动模式:步骤1、打开手动操纵窗口,并点击动作模式。步骤2、在弹出的窗口中选择所需模式,然后点击确定。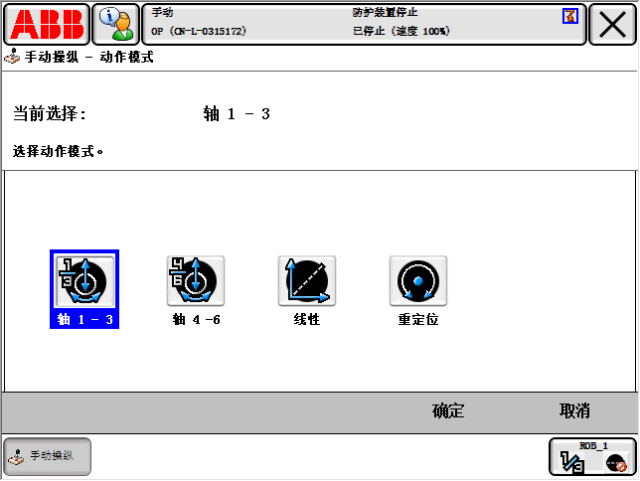 单轴运动Axis 1-3 轴 1-3
单轴运动Axis 1-3 轴 1-3 机器人一、二、三每个转轴单独转动。
机器人一、二、三每个转轴单独转动。 Axis 4-6 轴 4-6
Axis 4-6 轴 4-6 机器人四、五、六每个转轴单独转动。
机器人四、五、六每个转轴单独转动。 单轴运动何时使用比较好呢?(1)将机械单元移出危险位置;(2)将机器人移出奇点;(3)定位机器人轴,以便进行校准。注:机器人外轴运动必须为单轴运动;为了更精确校准,可使用微动控制。
重定位运动姿态运动:机器人TCP位置不变,机器人工具沿坐标轴转动,改变姿态。
单轴运动何时使用比较好呢?(1)将机械单元移出危险位置;(2)将机器人移出奇点;(3)定位机器人轴,以便进行校准。注:机器人外轴运动必须为单轴运动;为了更精确校准,可使用微动控制。
重定位运动姿态运动:机器人TCP位置不变,机器人工具沿坐标轴转动,改变姿态。
 注:重定位运动时,必须先选择工具坐标。
线性运动基坐标何时使用:当需要将可预测的运动轻而易举地转化为控制杆运动时,可以在基坐标系中进行微动控制。在许多情况下,基坐标系是使用最为方便的一种坐标系,因为它对工具、工件或其它机械单元没有依赖性。
注:重定位运动时,必须先选择工具坐标。
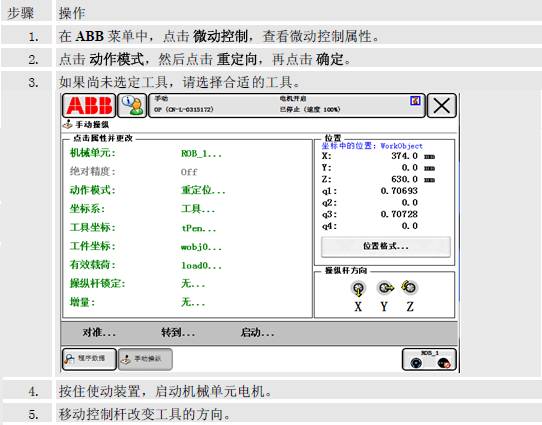
线性运动基坐标何时使用:当需要将可预测的运动轻而易举地转化为控制杆运动时,可以在基坐标系中进行微动控制。在许多情况下,基坐标系是使用最为方便的一种坐标系,因为它对工具、工件或其它机械单元没有依赖性。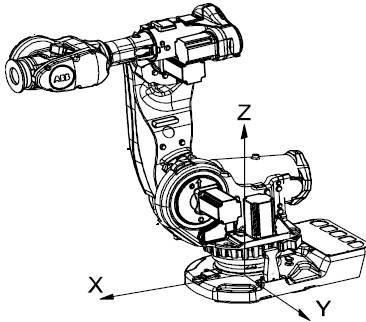 操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性;(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤;(3)点击坐标系,然后点击基坐标,再点击确定;(4)按住使动装置,启动操纵器电机;(5)移动控制杆,机械单元将随之移动;
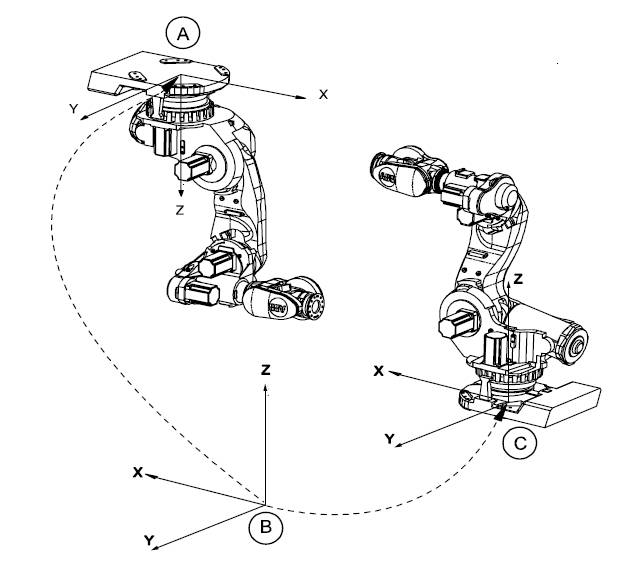
线性运动大地坐标何时使用:例如:有两个机器人,一个安装于地面,一个倒置。代表机器人的基坐标系也将上下颠倒。如果在倒置机器人的基坐标系中进行微动控制,则很难预测移动情况。此时可选择共享大地坐标系。
操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性;(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤;(3)点击坐标系,然后点击基坐标,再点击确定;(4)按住使动装置,启动操纵器电机;(5)移动控制杆,机械单元将随之移动;
线性运动大地坐标何时使用:例如:有两个机器人,一个安装于地面,一个倒置。代表机器人的基坐标系也将上下颠倒。如果在倒置机器人的基坐标系中进行微动控制,则很难预测移动情况。此时可选择共享大地坐标系。
 操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性。(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。(3)点击坐标系,然后点击基坐标,再点击确定。(4)按住使动装置,启动操纵器电机。(5)移动控制杆,机械单元将随之移动。
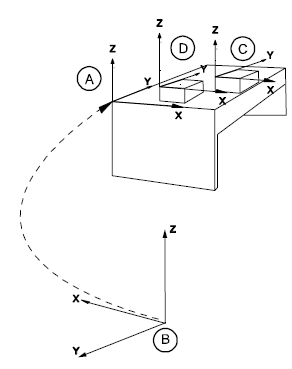
线性运动工件坐标何时使用:例如:工厂打算确定一系列孔的位置,以便沿着工件边缘钻孔。工厂打算在工件箱的两面隔板之间焊接。
操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性。(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。(3)点击坐标系,然后点击基坐标,再点击确定。(4)按住使动装置,启动操纵器电机。(5)移动控制杆,机械单元将随之移动。
线性运动工件坐标何时使用:例如:工厂打算确定一系列孔的位置,以便沿着工件边缘钻孔。工厂打算在工件箱的两面隔板之间焊接。
 操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性。(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。(3)点击工件以选择工件。(4)点击工具以选择工具。(5)点击有效载荷以选择有效载荷(6)点击坐标系,然后点击工件,再点击确定。(7)按住使动装置,启动操纵器电机。(8)移动控制杆,机械单元将随之移动。
线性运动工具坐标何时使用:使用工具体系对穿、钻、铣、锯等进行编程和调整
操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性。(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。(3)点击工件以选择工件。(4)点击工具以选择工具。(5)点击有效载荷以选择有效载荷(6)点击坐标系,然后点击工件,再点击确定。(7)按住使动装置,启动操纵器电机。(8)移动控制杆,机械单元将随之移动。
线性运动工具坐标何时使用:使用工具体系对穿、钻、铣、锯等进行编程和调整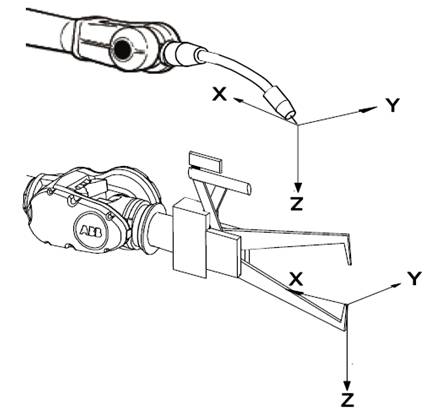 操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性。(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。(3)选择合适的工具。(4)点击坐标系,然后点击工具,再点击确定。(5)按住使动装置,启动机械单元电机。(6)移动控制杆,机械单元将随之移动。
操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性。(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。(3)选择合适的工具。(4)点击坐标系,然后点击工具,再点击确定。(5)按住使动装置,启动机械单元电机。(6)移动控制杆,机械单元将随之移动。审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31650浏览量
224558 -
ABB
+关注
关注
26文章
578浏览量
57568
原文标题:ABB机器人示教器入门-初级教学|干货
文章出处:【微信号:AMTBBS,微信公众号:世界先进制造技术论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
机器人教学设备数据采集解决方案
某机器人教学设备可模拟流水线典型生产任务,涵盖工业机器人的搬运、装配、打磨、抛光、涂胶等工序,集成PLC、触摸屏、机器人离线仿真编程、人机协作、传感

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
如果把高端机器人比作一个“人”,那么关节扭矩传感器就是遍布全身的“触觉神经”。没有它,机器人就像得了末梢神经麻痹——能按程序动,却感受不到外界的力量,动作僵硬、笨拙,甚至危险。
核心原
发表于 04-17 17:27
智能机器人从0到1系统入门课程 带源码课件 百度网盘下载
机器人 AI 交互:语音识别 + 视觉识别入门实践
在人工智能技术飞速演进的当下,机器人正从冰冷的自动化设备向具备感知能力的智能体进化。传统的机器人交互往往局限于单一的指令执行,缺乏对
发表于 04-11 16:41
入门宇树机器人开发:从SDK源码探索到实战操作
宇树机器人(Unitree)作为全球领先的四足机器人研发企业,其推出的unitree_sdk2是面向旗下 Go2、H1、B2 等系列机器人的第二代软件开发工具包。该 SDK 提供了丰富的接口和示例代码,支持开发者快速实现

SDI录像机CM8004B:赋能示教领域,驱动技能教学数字化升级
在医学手术培训、工业自动化操作教学等示教领域,高清、稳定、精准的音视频记录与传输是保障教学质量的核心前提。传统示
探索Xilinx Kria KR260机器人入门套件:开启机器人应用开发新旅程
探索Xilinx Kria KR260机器人入门套件:开启机器人应用开发新旅程 在当今科技飞速发展的时代,机器人技术的应用越来越广泛。对于电子工程师来说,拥有一款优秀的开发套件至关重要
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在高负载下CPU占用仅34%,完美实现多路视觉
发表于 10-29 16:41
突发!ABB机器人业务易主,软银53.75亿美元接盘
电子发烧友网报道(文 / 吴子鹏)10 月 8 日,瑞士工程巨头 ABB 宣布,将以 53.75 亿美元的价格将其机器人业务出售给日本软银集团。这一交易不仅标志着 ABB 战略转型的关键一步,也预示
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
2025 世界人形机器人运动会于 8 月 17 日圆满收官,赛场上机器人在跑步、跳跃、抓取等项目中的精彩表现,背后是运动控制、环境感知等技术的迭代升级。而在这些技术中,磁传感器芯片凭借独特优势,成为
发表于 08-26 10:02
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
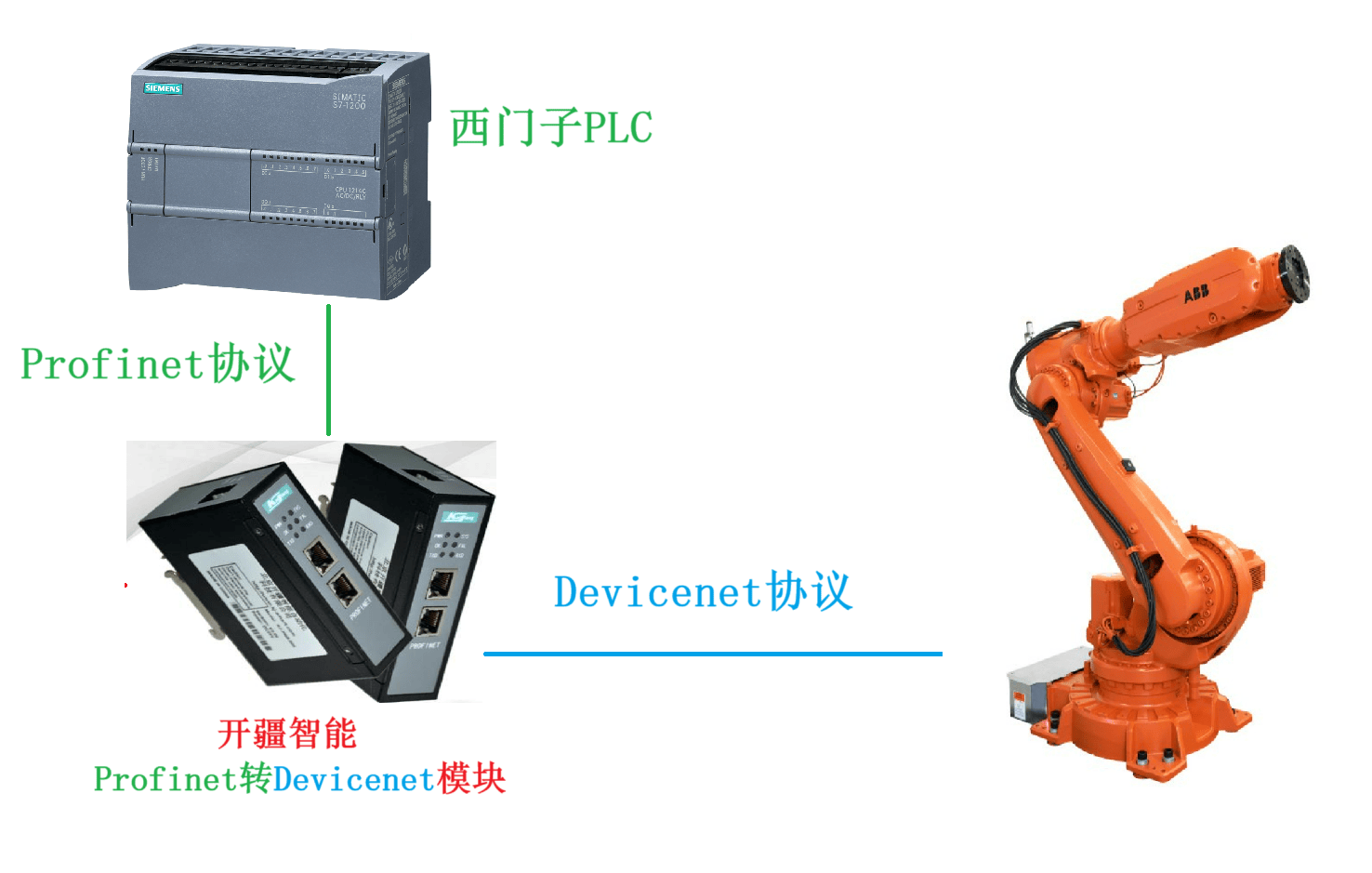
开疆智能Profinet转Devicenet网关连接ABB机器人配置案例
本案例是西门子PLC通过开疆智能研发的Profinet转Devicenet网关连接ABB机器人,网关作为Devicenet从站,ABB机器人作为主站进行通讯。具体步骤如下。
人形机器人背后的“灵魂导师”:工程师示教的价值与富唯智能的实践
示教不是对机器的妥协,而是对人机协同的深度赋能。正如训练师吴广所言:“要把机器人当作伙伴”——工程师输入的不仅是数据,更是让机器理解物理世界

开疆智能ModbusTCP转Devicenet网关连接三菱PLC与ABB机器人配置案例
本案例是三菱PLC通过开疆智能ModbusTCP转Devicenet网关连接ABB机器人的配置案例,具体分为三部分设置,分别为三菱PLC设置,ModbusTCP转Devicenet网关的配置以及ABB

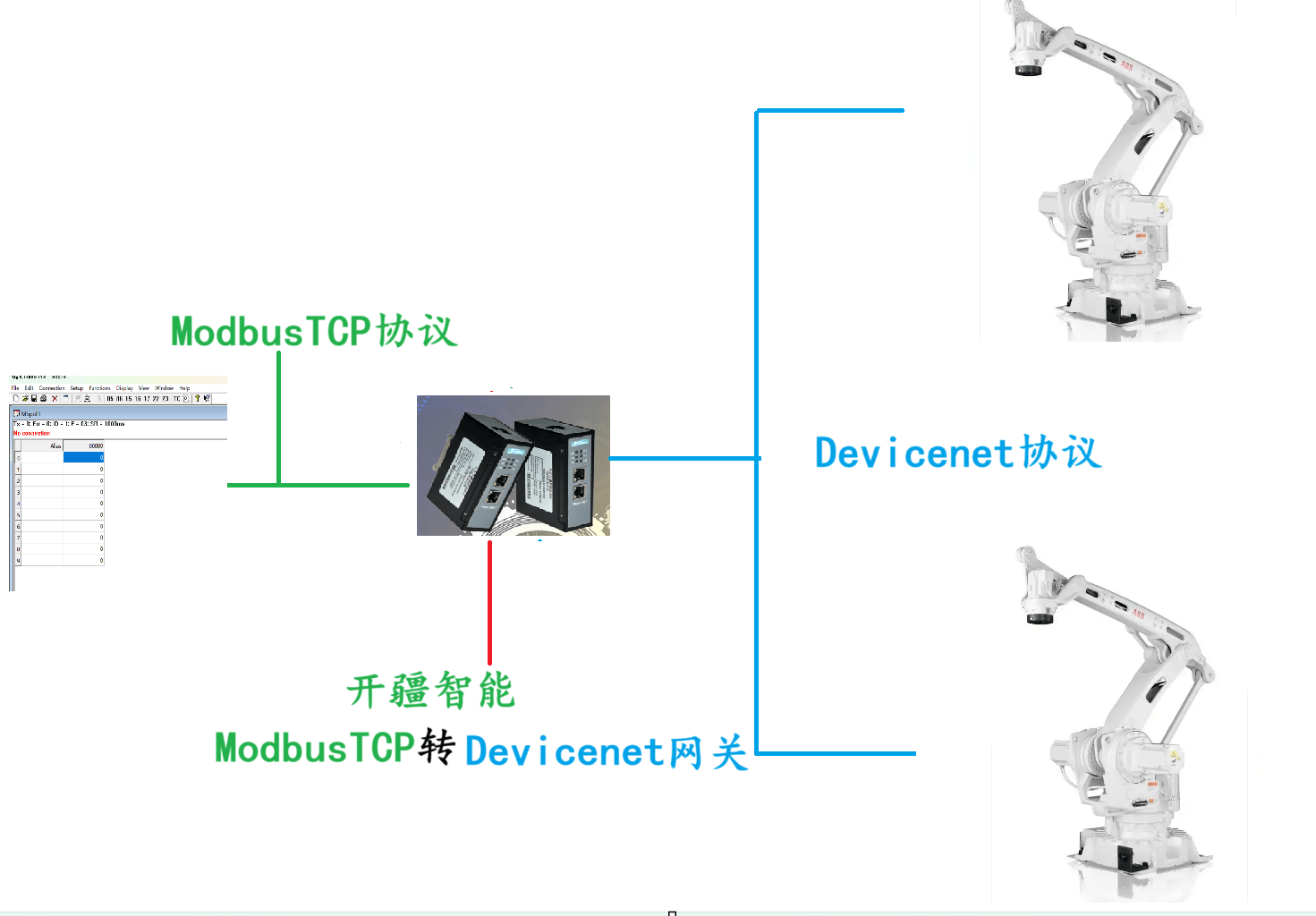
开疆智能ModbusTCP转Devicenet网关连接ABB机器人配置案例
本案例是模拟ModbusTCP主站软件通过开疆智能ModbusTCP转Devicenet网关连接ABB机器人的配置案例,具体过程如下。 配置过程 ABB机器人IO板配置 1、简介 (



评论