 提升工业通信能力,机器人驱动选型从侧面突破
提升工业通信能力,机器人驱动选型从侧面突破

上一期说到,随着国内工业机器人赛道上玩家的增多,机器人厂商,尤其是国内协作机器人厂商都开始寻求最适合自己的主控芯片。性能的高低已经不是单一的决定因素,这些厂商往往要考虑到拓展机器人功能以及把控整机成本。所以很多以前在芯片选型上保守的厂商现在都愿意尝试一下不同的芯片,择优选出最适合自家的型号。上一期物品们列出的仅仅是机器人关节驱动芯片里的三个为人熟知的系列,在这个应用领域里,还有这大量优秀的产品值得挖掘。
RX72M
单芯片依然是国内做工业机器人关节驱动最常见的方案。RA的RX72M加上EtherCAT的单芯片解决方案也是不少国内机器人厂商常用的选择。这种设计方案考虑到总线通信功能,减去了设计者需要自己外加从站控制芯片的步骤,将从控制器集成到了MCU上,实现了需要在单个芯片上使用专用控制器的系统配置,从而有助于减少零件数量并节省空间。因此这种方案很受机器人厂商欢迎。

RX72M产品组内核是RA出名的RX第三代CPU内核“RXv3 core”。性能很高,主频最高可达240MHz,这个系列能够在240 MHz下运行1396 CoreMark,再加上片上双精度FPU,显著提高了MCU处理能力。RA为这个拥有强大核心能力的系列配置了大容量4MB存储和SRAM 1 MB 的闪存记忆体。
这个通信接口尤为丰富,包括符合IEEE 1588的以太网MAC、SD主机接口、四SPI和CAN,对于通讯协议复杂的机器人工控应用来说这样的设计可以减少很多麻烦。从整个体系上这个系列也很注重对功耗的限制,RTC能够通过专用电源进行操作,并配有四种不同模式的低功耗模式。
如果RX72M仅仅在内核处理性能上做了增强,那么对机器人厂商而言可能都不会有那么多吸引力。就单单它支持市场上70%以上主要工业网络通信协议就能看出RX72M在基础设施上的建设花了不少心思。除此之外RA还有结合ROS的机器人驱动组合,也是极具吸引力。
AM64X
TI有不少用于工业机器人协作机器人的单芯片方案,旗下C2000系列,DSP系列一直是行业里的主流硬通货。但这次我们不看这些耳熟能详的系列,我们看看AM64X系列中的新品。虽然AM6442还没有正式发售,还没有经过各家机器人厂商的校验。但仅从它的配置上,就已经能断言在高端协作机器人驱动上它一定能稳占一席。
 (图源:TI)
(图源:TI)
AM6442是Sitara新增的工业级异构Arm处理器产品系列,针对需要将实时通信与应用处理结合的电机驱动器而构建。AM6442将两个支持时间敏感TSN技术的Sitara千兆位PRU-ICSSG与最多两个Arm Cortex-A53内核、最多四个Cortex-R5F MCU和一个Cortex-M4F MCU合并到一起。看到这里想必都明白这个处理器系列性能有多强悍了。即便是对于工业机器人的多轴控制,这个系列的性能应付起来也是绰绰有余。
双核64位Arm Cortex-A53微处理器系统性能高达 1.0GHz,子系统则支持最多2个双核Arm Cortex-R5F MCU 子系统主频最高800MHz专用于实时处理。而另一个单核Arm Cortex-M4F MCU最高400MHz。如此高性能的内核,配合紧密耦合的存储器组以及可配置的SRAM分区,对于实时性能要求越来越高的机器人应用正好适配。
为了应对复杂的工业通信,AM6442配置了两个千兆位工业通信子系统。子系统不仅仅支持TI非常有特色的时间敏感网络,还支持Profinet IRT、Profinet RT、EtherNet/IP、EtherCAT等等。对工业网络通信协议丝毫不比上面那位差。唯一的缺点可能就是对大多数走量的机器人厂商来说这样的配置太高端。
XMC4000
英飞凌的XMC4000系列采用了内置DSP指令的 Arm Cortex-M4内核。各型号在主频,应用方向上稍有不同,但单精度浮点单元、DMA以及MPU这些先进的技术一个都不少。
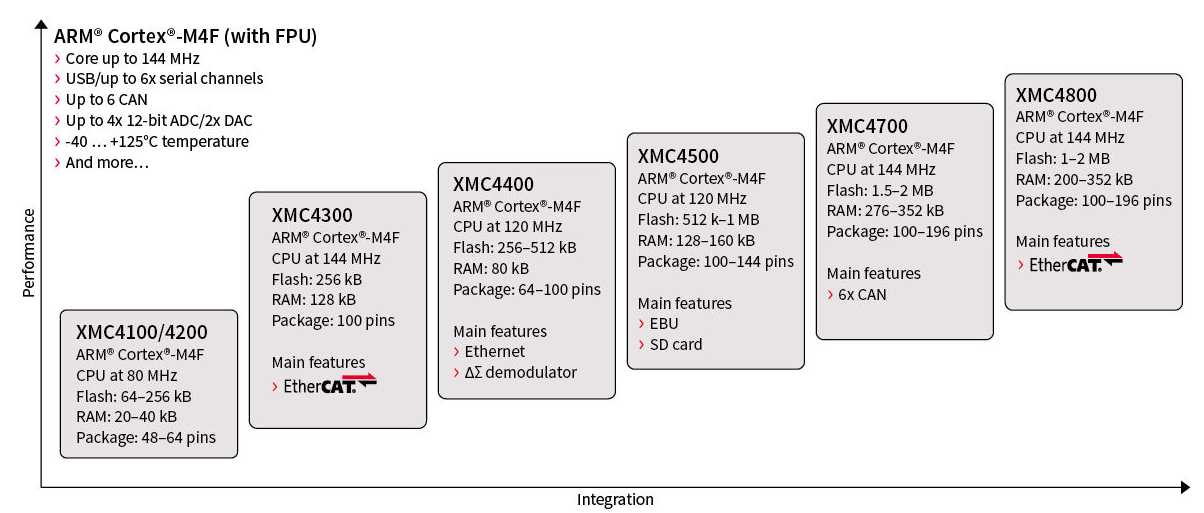
集成EtherCAT的4300与4800是很多机器人厂商钟爱的选择。本身强大的内核性能,加上增强型的通信能力以及相比之下更低的成本,这个系列能成为一些机器人厂商的偏爱不无道理。
就本身性能来看,144MHz的主频加上FPU、DSP,配合2MB的嵌入式闪存和352KB的嵌入式RAM,已经可以让工业机器人关节驱动表现良好的性能。此外还配置了一套全面的定时器、Delta Sigma 解调器、位置接口、具有ADC触发器的PWM。
XMC4800在嵌入式控制上是性价比很高的一个系列。XMC4800系列是业界首款将EtherCAT与ARM Cortex-M 控制器结合的MCU,具有集成闪存和模拟/混合信号IP。在EtherCAT设计上,英飞凌一直都以紧凑、成本效益为先,无需专用 ASIC和外部存储器。在成本的把控上无疑是切中了厂商的痛点。
小结
集成工业以太通讯协议的芯片受到一大批机器人厂商的青睐。在性能足够覆盖机器人驱动的情况下,提供更好的其他层面的支持也提升了下游厂商的黏性。
RX72M
单芯片依然是国内做工业机器人关节驱动最常见的方案。RA的RX72M加上EtherCAT的单芯片解决方案也是不少国内机器人厂商常用的选择。这种设计方案考虑到总线通信功能,减去了设计者需要自己外加从站控制芯片的步骤,将从控制器集成到了MCU上,实现了需要在单个芯片上使用专用控制器的系统配置,从而有助于减少零件数量并节省空间。因此这种方案很受机器人厂商欢迎。
(图源:RA)
RX72M产品组内核是RA出名的RX第三代CPU内核“RXv3 core”。性能很高,主频最高可达240MHz,这个系列能够在240 MHz下运行1396 CoreMark,再加上片上双精度FPU,显著提高了MCU处理能力。RA为这个拥有强大核心能力的系列配置了大容量4MB存储和SRAM 1 MB 的闪存记忆体。
这个通信接口尤为丰富,包括符合IEEE 1588的以太网MAC、SD主机接口、四SPI和CAN,对于通讯协议复杂的机器人工控应用来说这样的设计可以减少很多麻烦。从整个体系上这个系列也很注重对功耗的限制,RTC能够通过专用电源进行操作,并配有四种不同模式的低功耗模式。
如果RX72M仅仅在内核处理性能上做了增强,那么对机器人厂商而言可能都不会有那么多吸引力。就单单它支持市场上70%以上主要工业网络通信协议就能看出RX72M在基础设施上的建设花了不少心思。除此之外RA还有结合ROS的机器人驱动组合,也是极具吸引力。
AM64X
TI有不少用于工业机器人协作机器人的单芯片方案,旗下C2000系列,DSP系列一直是行业里的主流硬通货。但这次我们不看这些耳熟能详的系列,我们看看AM64X系列中的新品。虽然AM6442还没有正式发售,还没有经过各家机器人厂商的校验。但仅从它的配置上,就已经能断言在高端协作机器人驱动上它一定能稳占一席。
(图源:TI)AM6442是Sitara新增的工业级异构Arm处理器产品系列,针对需要将实时通信与应用处理结合的电机驱动器而构建。AM6442将两个支持时间敏感TSN技术的Sitara千兆位PRU-ICSSG与最多两个Arm Cortex-A53内核、最多四个Cortex-R5F MCU和一个Cortex-M4F MCU合并到一起。看到这里想必都明白这个处理器系列性能有多强悍了。即便是对于工业机器人的多轴控制,这个系列的性能应付起来也是绰绰有余。
双核64位Arm Cortex-A53微处理器系统性能高达 1.0GHz,子系统则支持最多2个双核Arm Cortex-R5F MCU 子系统主频最高800MHz专用于实时处理。而另一个单核Arm Cortex-M4F MCU最高400MHz。如此高性能的内核,配合紧密耦合的存储器组以及可配置的SRAM分区,对于实时性能要求越来越高的机器人应用正好适配。
为了应对复杂的工业通信,AM6442配置了两个千兆位工业通信子系统。子系统不仅仅支持TI非常有特色的时间敏感网络,还支持Profinet IRT、Profinet RT、EtherNet/IP、EtherCAT等等。对工业网络通信协议丝毫不比上面那位差。唯一的缺点可能就是对大多数走量的机器人厂商来说这样的配置太高端。
XMC4000
英飞凌的XMC4000系列采用了内置DSP指令的 Arm Cortex-M4内核。各型号在主频,应用方向上稍有不同,但单精度浮点单元、DMA以及MPU这些先进的技术一个都不少。
(图源:英飞凌)
集成EtherCAT的4300与4800是很多机器人厂商钟爱的选择。本身强大的内核性能,加上增强型的通信能力以及相比之下更低的成本,这个系列能成为一些机器人厂商的偏爱不无道理。
就本身性能来看,144MHz的主频加上FPU、DSP,配合2MB的嵌入式闪存和352KB的嵌入式RAM,已经可以让工业机器人关节驱动表现良好的性能。此外还配置了一套全面的定时器、Delta Sigma 解调器、位置接口、具有ADC触发器的PWM。
XMC4800在嵌入式控制上是性价比很高的一个系列。XMC4800系列是业界首款将EtherCAT与ARM Cortex-M 控制器结合的MCU,具有集成闪存和模拟/混合信号IP。在EtherCAT设计上,英飞凌一直都以紧凑、成本效益为先,无需专用 ASIC和外部存储器。在成本的把控上无疑是切中了厂商的痛点。
小结
集成工业以太通讯协议的芯片受到一大批机器人厂商的青睐。在性能足够覆盖机器人驱动的情况下,提供更好的其他层面的支持也提升了下游厂商的黏性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
mcu
+关注
关注
147文章
19134浏览量
404046 -
驱动控制
+关注
关注
0文章
145浏览量
16411
发布评论请先 登录
相关推荐
热点推荐
贞光科技代理——三星电容解决方案:人形机器人MLCC选型指南
作为三星电机授权代理商,贞光科技始终关注人形机器人产业对高可靠被动元器件的迫切需求。从AI运算单元到关节驱动再到精密传感,我们依托三星电机全系列MLCC产品线与本地化技术支持,为机器人

Neway电机方案在机器人技术方面的优势
采购率超85%,交货周期缩短至2周,紧急订单可72小时交付,确保工业机器人厂商的生产连续性。二、高功率密度与小型化设计,节省布局空间背景:工业机器人关节
发表于 03-30 09:39
从PLC到机器人:实时操作系统如何决定能力上限
制造业的进化,从来不是简单的设备替换,而是控制逻辑与底层能力的彻底升级。过去,产线靠PLC实现稳定、标准化的自动化制作;今天,机器人正在从“按流程执行”走向“自主感知、实时决策、精准执行”。涵盖工业
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
2026年马年春晚四家机器人公司:宇树、魔法原子、银河通用、松延动力的高动态、高精度、高可靠表现,背后离不开低温烧结银在电机驱动
发表于 02-17 14:07
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在高负载下CPU占用仅34%,完美实现多路视觉
发表于 10-29 16:41
遨博机器人以 “更专业更智能” 破局,让机器人从工业走向生活
在第 25 届中国国际工业博览会的机器人展区,遨博展台依旧是观众与行业目光的焦点。作为协作机器人领域的领军企业,今年推出的 “具身智能” 系列机器人更凭借多元
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
地磁基准的惯性导航系统可持续提供可靠数据。实测显示,搭载昆泰芯 KTM59 系列融合磁传感器的机器人,在复杂动态环境中定位可靠性达 99.7%,较单一传感器方案提升 27%。
磁传感器芯片的技术突破
发表于 08-26 10:02
医疗术野新突破:MODBUS转CANOPEN网关打造高性能手术机器人通信骨架
能直接影响手术效果与患者安全。传统MODBUS协议因其简单易用,在工业领域广泛应用,但在高实时、多节点、复杂交互的医疗机器人场景中显得力不从心。因此,将MODBUS设备接入高性能的CANopen网络,成为提升系统整体

智造未来:工业机器人关键技术突破与场景化应用趋势
机器人被誉为“制造业皇冠顶端的明珠”,是衡量国家创新能力和产业竞争力的关键标志,也是全球新一轮科技与产业革命的核心驱动力。当前,机器人产业蓬勃发展,深刻变革着人类生产生活方式,为经济社
工业机器人的特点
0.3%的年化生产力提升。因此,发展工业机器人推动国内自动化水平,提高产出是目前的不二之选。
** 适用范围广**
机器人相对于工人的优势还体现在应用范围广。
发表于 07-26 11:22

工业通信界的“月老”:CC\\-Link IE和DeviceNet如何牵起机器人的“红线”
机器人的“姻缘簿”上,它们竟成了最佳“CP”,联手解决设备通信难题。
耐达讯通信技术CC-Link IE基于以太网,擅长快速处理海量数据,就像工业界的“闪电快递员”;DeviceNet
发表于 06-12 14:35
当机器人遇上“语言障碍”:CCLINKIE转Profinet的“破冰外挂”来啦\\!
”才到机器人控制器,焊接精度从±0.1mm“漂移”到±0.3mm。直到一次技术改造,让不同协议的设备实现了“无障碍对话”,这场工业互联的破局战,藏着哪些硬核逻辑?
一、协议壁垒下的生产痛点
某合资车企
发表于 06-04 14:31
工业机器人与协作机器人概念不同
在自动化生产的浪潮中,工业机器人与协作机器人逐渐成为企业提升效率、优化产能的得力助手。但它们并非同一概念,在功能、设计与应用场景上有着显著差异。北京沃华慧通测控有限公司凭借深厚的技术沉




评论