 一款可无限扩展的软件定时器MultiTimer
一款可无限扩展的软件定时器MultiTimer

1. MultiTimer
今天给大家带来的开源项目是 MultiTimer,一款可无限扩展的软件定时器,作者0x1abin,目前收获 95 个 star,遵循 MIT 开源许可协议。
MultiTimer 是一个软件定时器扩展模块,可无限扩展你所需的定时器任务,取代传统的标志位判断方式, 更优雅更便捷地管理程序的时间触发时序。
项目地址:https://github.com/0x1abin/MultiTimer
2. 移植MultiTimer
2.1. 移植思路
开源项目在移植过程中主要参考项目的readme文档,一般只需两步:
- ① 添加源码到裸机工程中;
- ② 实现需要的接口;
2.2. 准备裸机工程
本文中我使用的是小熊派IoT开发套件,主控芯片为STM32L431RCT6:
移植之前需要准备一份裸机工程,我使用STM32CubeMX生成,需要初始化以下配置:
- 配置一个串口用于打印信息
- printf重定向
2.3. 添加MultiTimer到工程中
① 复制MultiTimer源码到工程中
② 在keil中添加 MultiTimer的源码文件
③ 将MultiTimer头文件路径添加到keil中
3. 使用MultiTimer
使用时包含头文件:
#include "multi_timer.h"
如果遇到multi_timer.c文件中NULL宏定义报错,则在multi_timer.h中添加
头文件即可。
3.1. 创建Timer对象
/* USER CODE BEGIN PV */struct Timer timer1;struct Timer timer2;/* USER CODE END PV */
3.2. Timer回调函数
/* Private user code ---------------------------------------------------------*//* USER CODE BEGIN 0 */void timer1_callback(){printf("timer1 timeout! ");}void timer2_callback(){printf("timer2 timeout! ");}/* USER CODE END 0 */
3.3. 初始化并启动Timer
始化定时器对象,注册定时器回调处理函数,设置定时时间(ms),循环定时触发时间:
/* USER CODE BEGIN 2 */printf("multi timer test... ");//重复计时,周期为1000次,即1000ms=1stimer_init(&timer1, timer1_callback, 1000, 1000);timer_start(&timer1);//单次计时,周期为50次,即50mstimer_init(&timer2, timer2_callback, 50, 0);timer_start(&timer2);/* USER CODE END 2 */
3.4. Timer对象处理
在循环中调用Timer对象处理函数,处理函数会判断链表上的每个定时器是否超时,如果超过,则拉起注册的回调函数:
/* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */timer_loop();}/* USER CODE END 3 */
3.5. 提供Timer时基信号
MultiTimer中所有的定时器都是通过一个32位的计数值_timer_ticks来判断的,所以需要一个硬件定时器提供时基信号,递增该值。
本文中使用的是STM32HAL库,所以通过Systick来提供,无需设置额外的定时器。
在main.c文件的最后编写Systick回调函数:
/* USER CODE BEGIN 4 */void HAL_SYSTICK_Callback(void){//给multitimer提供时基信号timer_ticks(); //1ms ticks}/* USER CODE END 4 */
然后在stm32l4xx_it.c中调用该回调函数:
/*** @brief This function handles System tick timer.*/void SysTick_Handler(void){/* USER CODE BEGIN SysTick_IRQn 0 */HAL_SYSTICK_IRQHandler();/* USER CODE END SysTick_IRQn 0 */HAL_IncTick();/* USER CODE BEGIN SysTick_IRQn 1 *//* USER CODE END SysTick_IRQn 1 */}
接下来编译下载,看在串口助手中看到打印的日志: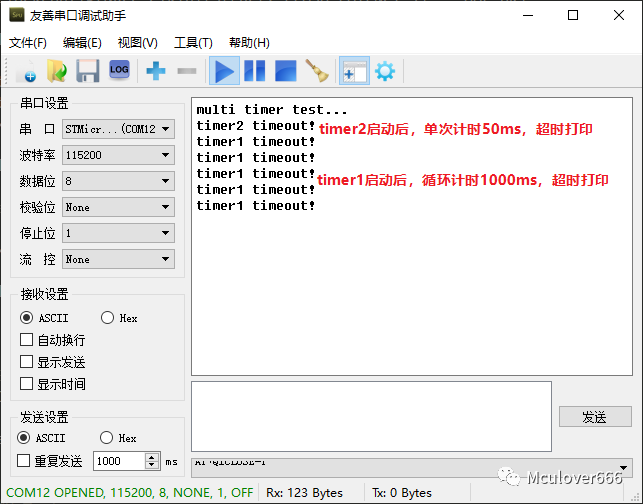
4. MultiTimer设计思想解读
4.1. 软件定时器设计思想
MultiTimer的设计比较简洁。
设置一个计数值_timer_ticks不断递增,由定时器提供的中断驱动,只计次数,不计时间,有了很大的自由度,一般时基信号设置为1ms一次:
/*** @brief background ticks, timer repeat invoking interval 1ms.* @param None.* @retval None.*/void timer_ticks(){_timer_ticks++;}
在程序运行时循环比较定时器设置的超时值是否大于当前_timer_ticks的计数值,如果是则再次判断是否重复计数值是否为0,是则停止定时器,完成单次计时效果,否则修改计数值,最后拉起注册到该定时器的回调函数执行:
/*** @brief main loop.* @param None.* @retval None*/void timer_loop(){struct Timer* target;for(target=head_handle; target; target=target->next) {if(_timer_ticks >= target->timeout) {if(target->repeat == 0) {timer_stop(target);} else {target->timeout = _timer_ticks + target->repeat;}target->timeout_cb();}}}
4.2. 单链表操作
MultiTimer的代码少,非常适合拿来学习单链表的操作,学习数据结构的过程是乏味的,不如直接来个实例看看是如何操作的。
① 链表的节点设计为一个软件定时器,所以理论上支持的定时器数量只受内存限制。
typedef struct Timer {uint32_t timeout;uint32_t repeat;void (*timeout_cb)(void);struct Timer* next;}Timer;
定时器初始化函数timer_init就是初始化一个链表节点:
void timer_init(struct Timer* handle, void(*timeout_cb)(), uint32_t timeout, uint32_t repeat){// memset(handle, sizeof(struct Timer), 0);handle->timeout_cb = timeout_cb;handle->timeout = _timer_ticks + timeout;handle->repeat = repeat;}
② 设置链表头指针,只需知道头指针就能完成对整个单链表的操作:
//timer handle list head.static struct Timer* head_handle = NULL;
③ 向单链表增加一个节点
向单链表增加一个节点有三种方式:
- 在单链表尾部增加一个节点
- 在单链表头部增加一个节点
- 在单链表中间增加一个节点
MultiTimer中所有的结点都是定时器,每个定时器之间相互独立,不存在先后次序关系,所以无论加到中间,还是加到尾部,还是加到头部,最后的功能都是一样的,但是在插入算法上有优劣性能之分。
先来看看再单链表尾部增加一个节点的算法: ( 我会动哦 )
( 我会动哦 )
int timer_start(struct Timer* handle){/*** 算法1 —— 向单链表尾部添加节点* 时间复杂度O(n)* Mculover666*/struct Timer* target = head_handle;if(head_handle == NULL){/* 链表为空 */head_handle = handle;handle->next = NULL;}else{/* 链表中存在节点,遍历找最后一个节点 */while(target->next != NULL){if(target == handle)return -1;target = target->next;}target->next = handle;handle->next = NULL;}return 0;}
这种算法理解简单,实现简单,但是算法时间复杂度秒变为O(n),当n很大时,插入一个节点的时间就会非常久。
再来看看在链表头部插入一个新节点的情况:
(我会动哦)
int timer_start(struct Timer* handle){/*** 算法2 —— 向单链表头部添加节点* 时间复杂度O(n),如果去掉判断重复,则时间复杂度O(1)* 0x1abin*/struct Timer *target = head_handle;//判断是否有重复的定时器while(target){if(target == handle){return -1;}target = target->next;}handle->next = head_handle;head_handle = handle;return 0;}
这里第二种头部插入节点的算法时间复杂度依然是O(n),emmm?
其实,这里因为单链表节点是定时器,在插入的时候需要对整个链表进行判断,避免重复添加同样的定时器节点,所以无论任何一种算法,都需要对单链表进行遍历。
如果在不需要判断重复的情况下,尾部插入算法仍然需要遍历,但是头部插入算法只需要插入就可以,时间复杂度为O(1),算法更优。
④ 单链表删除其中一个节点
删除单链表的节点时,因为节点自身只保存有下一个节点的指针,并没有指向上一个节点的指针,所以不能直接入手删除节点,那么如何删除单链表的节点呢?
方法是:设置二级指针(指向Timer类型指针的指针),通过遍历链表的方式来寻找节点中next指针指向删除节点的那个节点,代码如下。
void timer_stop(struct Timer* handle){struct Timer** curr;for(curr = &head_handle; *curr; ) {struct Timer* entry = *curr;if (entry == handle) {*curr = entry->next;// free(entry);} elsecurr = &entry->next;}}
-
软件
+关注
关注
69文章
5350浏览量
91860 -
定时器
+关注
关注
23文章
3372浏览量
124445
原文标题:MultiTimer,一款可无限扩展的软件定时器
文章出处:【微信号:strongerHuang,微信公众号:strongerHuang】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
SGM819SxQ 汽车应用看门狗定时器电路解析
SGM819S看门狗定时器电路:设计与应用详解
深度解析SGM821:纳米功耗系统定时器与看门狗功能
LM555QML定时器:功能特性、应用及设计要点
LM555-MIL定时器:高精度定时与振荡的理想之选
LMH0026:SD SDI重定时器的卓越之选
DS160PT801:高性能PCIe重定时器的卓越之选
PWM、定时器、SysTick 区别及应用场景

SysTick系统滴答定时器简介

TPL5010-Q1 纳米功耗系统定时器(带看门狗功能)技术文档摘要

TPS3435 Nano IQ精密超时看门狗定时器技术解析与应用指南
Texas Instruments DS160PT801X16EVM重定时器评估模块数据手册



评论