 伺服驱动器接线端子说明
伺服驱动器接线端子说明

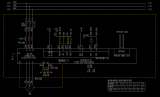
伺服驱动器的前面板左边一般有三个接线端口,驱动器主要有控制回路电源、单相AC电源等构成,通过CN3端口和编码器接线来控制驱动器,由于普通的伺服电机呢它的编码器都是装在电机后面,因此驱动器单相接法必须接R、S端子。
驱动器通常是通过CN3端口与用边插式连接件连接等上位机相连接组成任意极数的端子排,三相电源必须经过变压器变压才能接,脉冲信号接到伺服驱动器CN4水晶头插口上,因此我们在选择接线端子时可以选择公制线规也可以选择标准线规。
伺服驱动器接线端子常见的方法:
1.插拔式接线端子
2.栅栏式接线端子
3.弹簧式接线端子
4.轨道式接线端子
5.H型穿墙式接线端子
不管是以上那种接线方法,接线端子时必须将与线直径与额定的电流置于导电片平台两侧并与导电片夹合在一起,绝缘基座置于接线件座的绝缘隔板内,这样驱动器的绝缘性能以及防护等级才能有所提高。
本文综合整理自百度经验 伺服与运动控制 自动化控制系统交流
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
驱动器
+关注
关注
54文章
9111浏览量
156464 -
编码器
+关注
关注
45文章
4011浏览量
143325 -
电机
+关注
关注
145文章
9703浏览量
154786 -
伺服驱动器
+关注
关注
22文章
569浏览量
33631
发布评论请先 登录
相关推荐
热点推荐
伺服驱动器增益参数的调整方法
伺服驱动器的增益调整,本质上是优化其内部的 比例-积分-微分(PID)控制器 ,让电机能又快又准地跟随指令,同时避免振动和噪音。一般有两种调整路径:依赖软件算法的 自动调整 ,和深入核心的 手动整定
安川伺服驱动器警报代码说明
安川伺服驱动器的警报代码通常以 A 开头(表示警报)或 CPF 开头(表示操作器通讯错误),后面跟随三位数字或字母组合。每个代码都对应特定的故障原因,帮助您快速定位问题。 为了方便您查阅,我将常见

伺服驱动器最常见的故障及解决方法
伺服驱动器作为工业自动化系统中的核心部件,其稳定性直接影响设备运行效率。根据市场反馈和技术统计,以下针对伺服驱动器六大高频故障现象、成因及解决方案进行系统性分析,并提供预防性维护建议。


西门子S7-1200 PLC与SINAMICS V90伺服驱动器PROFINET通信控制实例
S7-1200系列PLC可以通过PROFINET与V90 PN型伺服驱动器组合进行速度控制,S7-1200 PLC负责发送控制命令和速度给定,并读取V90伺服驱动器状态和实际转速;V9
人形机器人伺服电机驱动器新动力:高性能电容器的协同作用
PART1人形机器人心脏:伺服电机驱动器随着人工智能和机器人技术的飞速发展,人形机器人正逐步成为智能制造和未来生活的新伙伴。在这一领域,伺服电机作为人形机器人的“心脏”,其性能直接决定了机器人的运动

工业机器人伺服驱动器配哪样的UPS不间断电源比较好
随着工业自动化程度的不断提高,工业机器人已经成为现代制造业不可或缺的重要设备。作为工业机器人的核心部件,伺服驱动器对供电质量有着极高的要求。那么,如何为工业机器人伺服驱动器选择合适的U

永磁电机调速驱动器与伺服驱动器、变频器有哪些异同?
永磁电机调速驱动器、伺服驱动器与变频器作为现代工业控制领域的三大核心动力装置,在电机控制领域各具特色且存在交叉应用。但在应用过程中,它们之间存在一些异同点。以下是对这三者的详细比较:

使用西门子报文控制V90伺服驱动器
西门子的V90伺服驱动器可以通过PROFINET(PN)进行通信,并且通常与SINAMICS V90集成使用的控制器是SIMATIC S7系列PLC。西门子报文(Messages)通常指的是在PLC和

EtherCAT主站转Profinet网关接IS620N伺服驱动器与西门子plc通讯案例
在现代工业自动化领域,伺服驱动器的应用非常广泛。汇川IS620N系列伺服驱动器因其高性能和可靠性,受到了许多用户的青睐。这款驱动器支持Eth

东元伺服驱动器报警代码
东元伺服驱动器的报警代码是用于指示驱动器运行过程中遇到的故障或异常状态的重要信息。以下是一些常见的东元伺服驱动器报警代码及其对应的故障原因:

富士伺服驱动器的常用故障代码及其检查与维护
富士伺服驱动器的常用故障代码及其检查与维护方法如下: 一、常用故障代码及其检查 1. 过电流故障(OC 1、OC 2) ● 显示:驱动器显示过电流故障。 ● 检出内容:主回路晶体的输出




评论