 机器人关节用什么电机,机器人关节电机可分为哪几种
机器人关节用什么电机,机器人关节电机可分为哪几种

机器人关节是机器人各个零部件之间发生相对运动的机构。关节之中,单独驱动的为主动关节,反之称为从动关节。机器人关节模组通常采用超声波电机、伺服电机、谐波减速器、VR减速器、行星齿轮箱电机等。
机器人关节电机大致可细分为以下几种
1.交流伺服电动机:包括同步型交流伺服电动机及反应式步进电动机等。
2.微型电动机:包括超声波电机
3.直流伺服电动机:包括小惯量永磁直流伺服电动机、印制绕组直流伺服电动机、大惯量永磁直流伺服电动机、空心杯电枢直流伺服电动机。
4.步进电动机:包括永磁感应步进电动机。
fqj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31497浏览量
223883 -
电机
+关注
关注
145文章
9711浏览量
154895
发布评论请先 登录
相关推荐
热点推荐
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
如果把高端机器人比作一个“人”,那么关节扭矩传感器就是遍布全身的“触觉神经”。没有它,机器人就像得了末梢神经麻痹——能按程序动,却感受不到外界的力量,动作僵硬、笨拙,甚至危险。
核心原
发表于 04-17 17:27
机器人关节电机灌封解决方案 | EP 1720柔性环氧胶
的场景,已经成为现实…… 在机器人不断向 轻量化、高精度 、智能协作演进的浪潮下, 关节电机 作为“驱动核心”,正面临 功率密度、散热 与 可靠性 的多重挑战。材料突破,已成为提升其性能的关键。 无框力矩电机——高效

Neway电机方案在机器人技术方面的优势
,确保电机控制系统在长时间运行中不易出现故障。五、高效能与低损耗,提升系统能效背景:工业机器人关节需高精度、高响应速度的电机控制,电源模块需提供稳定直流电压并减少能量损耗。Neway方
发表于 03-30 09:39
SiLM2026EN-DG DFN3×3封装如何实现200V半桥驱动,为机器人关节电机注入高效动力?
在机器人关节电机驱动、小型步进电机控制以及DC-DC电源转换等应用中,是不是会面临一个两难选择:既要实现高压、高速的功率开关驱动,又要在有限的空间内完成紧凑布局。传统驱动方案往往需要在性能与体积之间
发表于 03-26 08:17
基于兆易创新GD32H75EYMJ7 MCU的机器人GaN关节驱动解决方案
在工业机器人、协作机器人等智能装备的发展进程中,关节驱动作为核心动力单元,其响应速度、控制精度、能效表现与集成度直接决定了机器人的运动性能和应用场景。当前

扭矩之源:解析关节电机线圈如何实现机器人的柔顺运动
关节电机线圈 作为机器人关节驱动的核心组件,直接决定了机械臂的灵活性、精度与响应速度。在工业机器人、仿生假肢和精密自动化设备中,关节电机是实
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
科技:《武 BOT》:H2人形机器人31个高精度关节、单臂7自由度,完成醉拳、双截棍、舞剑,同步误差**< 0.1秒;核心是高功率密度伺服电机+高速控制+**强散热。
**魔法原
发表于 02-17 14:07
半桥驱动SiLM2026EN-DG DFN3x3小封装,轻松搞定200V机器人关节电机
自家的HVIC和锁存免疫CMOS技术,单片集成,稳定性据说有保障。输入兼容性也很好,逻辑输入电压最低能到3.3V,和现在的MCU、逻辑电路对接起来很方便。广泛应用于机器人关节电机驱动,正好契合200V半
发表于 12-13 08:41
采用DFN3×3封装SiLM2026EN-DG 200V半桥驱动器,如何实现机器人关节的高效紧凑驱动?
和600mA灌电流的输出能力,兼顾高速开关与系统可靠性,尤其适合空间受限的机器人关节电机、POL电源、DC-DC转换器等应用。核心特性详解:
宽电压支持:母线电压最高200V,VCC工作范围10V
发表于 12-09 08:35
高性能人形机器人关节模组选型的关键技术要素
人形机器人关节模组一般是集传动装置、驱动器、电机、抱闸、编码器以及力矩传感器等于一体的精密部件,负责驱动和控制人形机器人各个关节精确实现拟人


集成多摩川磁性编码器的伺服电机与机器人关节设计创新
在科技日新月异的今天,机器人正以前所未有的态势融入我们的生产生活。从工业流水线上不知疲倦的机械臂,到家庭中灵活可爱的扫地机器人,它们的身影无处不在。而在机器人的核心部件中,伺服电机和
人形机器人关节电机:永磁电机类型解析
随着人形机器人加速商业化,电机作为驱动关节运动的关键部件,在人形机器人上使用的电机种类根据其设计目标和功能需求而有所不同,主要包括伺服

集成MT6701磁编芯片的机器人关节模块化设计与驱动优化
随着机器人技术的快速发展,关节模块作为机器人的核心执行单元,其性能直接决定了机器人的运动精度和响应速度。近年来,磁编码器因其非接触式测量、高分辨率、强抗干扰能力等优势,逐渐成为

人形机器人之26家电机制造商盘点
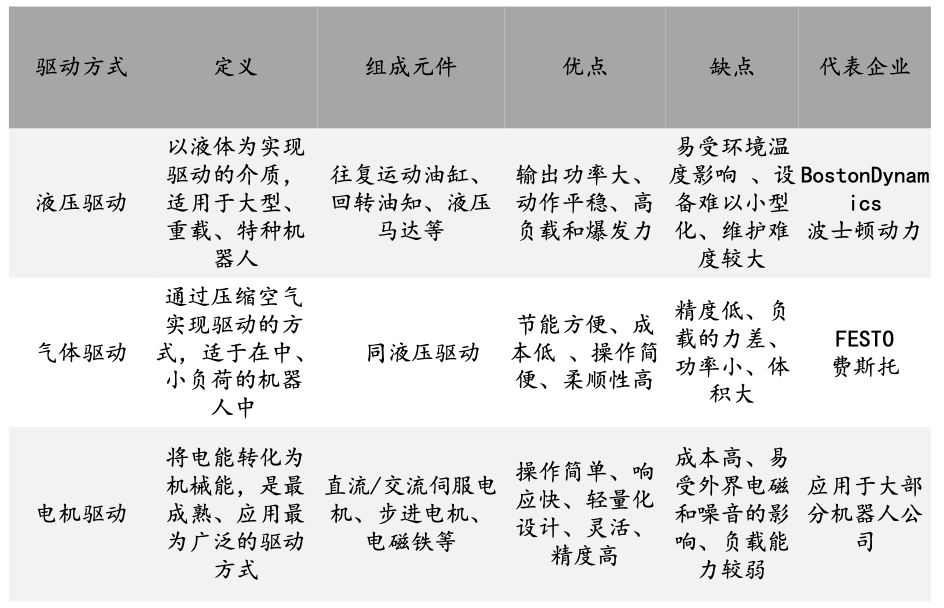
机器人驱动方式可分为液压驱动、气体驱动和电机驱动三种,其中电机驱动是应用最广泛的方式,具有高精度、实时响应等优势,更适合当今人形机器人的发展



评论