 科学家发现可以解释机器人握住湿物体时发生摩擦的新物理定律
科学家发现可以解释机器人握住湿物体时发生摩擦的新物理定律

一直以来,接触潮湿的表面,对机器人来说是巨大的挑战。
最近,科学家发现了一种新的物理定律,可以解释机器人握住湿物体时发生的摩擦。这种新发现的摩擦机理,可能会促进诞生更适合外科手术的机器人设计。
“我们的工作为在远程手术和制造业等领域创建更可靠、功能更强的触觉和机器人设备打开了大门,” 在和团队发现新的物理规律之后,北卡罗莱纳州立大学化学与生物分子工程学助理教授 Lilian Hsiao 表示。
北卡罗莱纳州立大学化学与生物分子工程学的博士毕业生彭云鹄,是发现上述解释机器人摩擦的新物理定律的主要研究人员之一,也是 Lilian Hsiao 课题组的学生,他说该研究将推动众多机器人技术的发展。
近日,其以第一作者身份在《自然・材料》上发表了相关论文,论文题为《机器人和人手指的弹性动力摩擦》(Elastohydrodynamic friction of robotic and human fingers on soft micropatterned substrates)。
摩擦是物理的中心主题之一,摩擦无处不在也非常必要,它能帮助我们握住东西而不会掉落。
尽管机器人设备已经广泛使用,但研发人员很难考虑机器人在抓取物体时产生的摩擦,特别是在潮湿的环境中。不同于人类可以凭直觉去握住湿的物体,以防止物体滑出我们的手。对于机器人而言,这一直是非常困难的挑战。
大多数摩擦滑动的相互作用都涉及到粗糙的表面。这种摩擦过程在物理学中具有基本意义,这早已体现在几个世纪的研究中。它们在当今不同的行业领域也具有重要的实际重要性。
但是,流体耗散、固体变形和局部流动导向效应之间,有着复杂的相互作用,因此人类尚未完全了解图案化表面的润滑滑动。
作为一种特殊摩擦,弹性流体动力润滑摩擦 (elastohydrodynamic lubrication,EHL) 一直难以被研究,它是两个固体表面之间的摩擦类型,固体表面之间会被一层流体隔开。
这种摩擦的常见场景有,当你用指尖互相摩擦时会产生一种摩擦,但是你的皮肤上存在着一层天然油脂的薄层流体。这种摩擦,还常见于沾满洗手液泡沫的双手、以及用手触摸水果店水果去了解成熟度。
人类对于这种摩擦,相对比较可控。这是因为皮肤中的数千上万的触觉机械感受器,可以向神经系统提供必要的反馈,从而能够快速调节握力。
但是,在开发控制机器人抓握能力的材料时,很难处理弹性流体动力润滑摩擦。
想象一下,当截肢患者正在使用机械臂,或者医生正在进行显微外科手术,对于这种摩擦往往很难控制。
举例来说,机器人手臂、以及具备抓握能力的触觉材料,在制备过程中都需考虑到摩擦。但是,由于此前人类对 EHL 的理解有限,研究人员在研发拥有可调摩擦特性的材料、以及使用相关技术时,会受到一定限制,而这会影响触碰屏等器件制造、远程手术等多个领域的应用。
受人类抓取能力的启发,机器人系统的目的是设计具有机械属性、传感器和反馈原理的抓握器,以提高抓握器的稳定性。新兴的触觉技术,可通过电粘附或超声波振动,来调节摩擦来模拟自然表面的感觉。然而,捕捉真实表面的感觉仍然具有挑战性,因为只要 EHL 仍然存在,这些挑战依然会在。
也就是说,要想制备出能控制 EHL 摩擦的材料,研究人员需要一个可兼容各种样式、各种材料和各种运行条件的框架,而这正是本次研究的初衷。
发现新定律,助力机器人制备
期间,彭云鹄发现一种新定律,该定律可控制图案化表面上的弹性流体动力润滑的峰值摩擦值。在平滑摩擦对中,并不存在峰值摩擦值。因为,这种不同源于在有纹理的表面,流体产生了不同的流动方式。
本次研究中,运用彭云鹄发现的新定律,只要能对物体表面进行构图,即可控制弹性流体动力润滑摩擦,并可将其应用于许多不同的软系统。
通过改变软摩擦对的几何形状、流体特性和弹性,并使用流变仪测量润滑摩擦,即可生成一种框架模型。这款模型能预测生物启发的机器人指尖和人类手指的 EHL 摩擦。
由于其具备广泛适用性,因此可给机械手和抓手的设计提供信息,此外还开辟出一种将摩擦编码转为触觉信号的新方法。
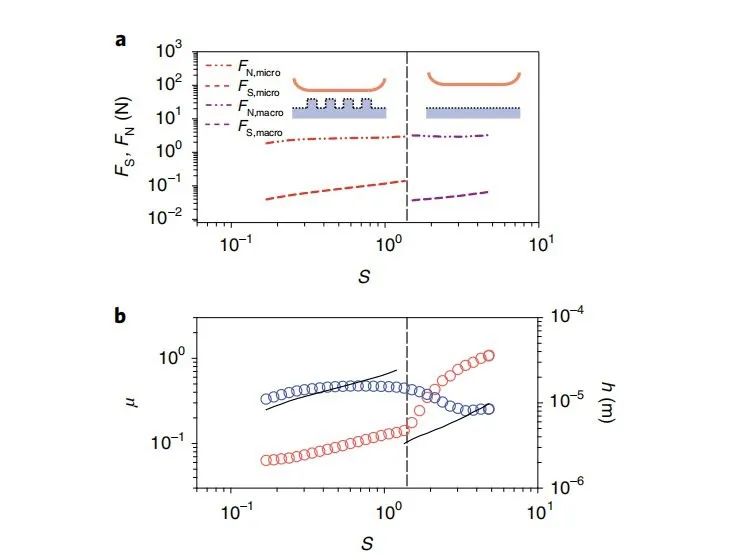
图 | 在具有图纹的软物质表面的正压力,摩擦,以及润滑膜厚度在不同滑动速度下的变化(来源:受访者)
只要能对物体的表面进行构图,该定律就可以用来解释 EHL 摩擦,并且可以将其应用到许多不同的软物质系统中。在这种情况下,表面图案可以是任何东西,如从手指尖上略微凸起的表面、到机器人工具表面上的凹槽。
彭云鹄观察到,长度在 10μm 至 100μm 之间的图案,在 EHL 摩擦中滑动到另一个表面时,会在 EHL 摩擦中引入唯一一个局部峰值。
在彭云鹄的系统中,h 被定义为静止模式的顶部和滑动表面的底部之间的距离,然后他使用雷诺兹方程预测了 FS~U/h 和 FN~U/h2。
其中,摩擦空气的体积摩擦系数 μ,由 μ=FS/FN 给出,并且 h 的细小变化也会产生 μ 的实质性变化。虽然可以用专门的双折射和干涉测量来直接测量 h,但这样测量的 h 的分辨率在光学上限制在~3μm 以下。总结来说,这些数值方法提供了一个令人满意的 μ 模型。
其中,他利用四个方程式解释了 EHL 所需的物理力,并分别在三个系统中证明了该规律:人类手指;受生物启发的机器人指尖;以及一个称为摩擦流变仪的工具,该工具可用于测量摩擦力。
从表面上来看,这三种体系从受力面积,表面图案等几方面来看截然不同。尤其是人类以及机器手指两个体系无法像摩擦流变仪一样控制受力。然而,这三个系统的的具体证明过程都有着如下的过程:
为了解这种效果、并为 EHL 摩擦的设计提供指导框架,彭云鹄使用雷诺润滑理论,对剪切力 FS、和法向力 FN 相对于滑动速度 U 和流体膜厚 h 的变化做以建模。
随后他发现,半分析理论、统计分析表明、线性回归和所有实验数据点之间,都具备极好的一致性。
综上所述,针对三个不同系统的适用性,该设计原理可开辟出很多机会,其中包括通过改变软表面图案,来改变润滑摩擦。
这一发现的意义在于,一旦我们对触觉拓宽了认知,机器人就能和潮湿表面进行物理接触,就可诞生出能在潮湿和肮脏的条件下进行抓握的机器人。
该研究显示,三角弓的伸缩行为可扩展到人类和机器人的手指,并阐明了在图案表面的抓取和触觉探索中影响摩擦的因素。
这意味着,本次研究中的框架可研究 EHL 在减小弹性和图案几何形状之间保持平衡的规律,以此解决阻碍 EHL 理论广泛应用的基本挑战,从而推动机器人技术的广泛发展。
在远程外科领域,借助该规律可制备出触觉更强的机器人,从而让外科医生通过远程控制机器人设备、来执行外科手术。
在更广泛的领域如食品设计、化妆品设计、景观演变中,该规律都可扮演重要作用。
谈及未来的落地计划,彭云鹄告诉 DeepTech:“本研究所展示的物理规律确实能够帮助设计更灵敏的机器人手,然而该规律的应用不仅于此,还能够用在日用消费品领域,比如食品和化妆品配方的设计。”
人类的手指其实是含有图纹的软物质,与其同理的是我们的舌尖,人类舌头上的味蕾也可以被看做是含有图纹的软物质。
当我们涂抹化妆品以及咀嚼食物时,不同配方的化妆品和食物会给消费者不同的感受,究其原因就是因为这些过程中产生了不同的 EHL 摩擦。
但是,人类手指由于富含神经,可以感受非常细微的摩擦力的区别,对于舌尖来说,味蕾在咀嚼过程中会产生弯曲从而反馈出不同的摩擦力。
然而人类手指以及味蕾的图纹,有着比较固定的特征长度,依据本次论文中图 4 的结论,我们应该感受到相同的摩擦,那这是否意味着图 4 产生的结论就不适用于此了呢?
并不然。在本次研究中,彭云鹄等人仅仅取了 EHL 摩擦的峰值进行分析。可以预见的是,由于流体粘度以及其他特性的不同,在不同的摩擦速度下运用相同的理论推导方式会产生新的类似于文章中图 4 的模型曲线,从而帮助我们进一步预测不同流体体系下的 EHL 摩擦。
在此情况下,食品以及化妆品领域可以应用本研究中的模型设计出来对应的配方,从而给予消费者特定的摩擦反馈以及特定的感受。
事实上,软物质摩擦学(Soft tribology)在各个领域有着非常广泛的应用前景,除了本文介绍的几个领域之外,该学科还在新型人工关节制造等领域有着相当大的潜力,可以预见的是摩擦学整体在将来会继续蓬勃发展。
原文标题:物理新定律诞生,由中国科学家发现,可帮助机械臂抓住潮湿物体,有望用于机器人远程手术 | 专访
文章出处:【微信公众号:DeepTech深科技】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
机器人
+关注
关注
213文章
31444浏览量
223669
原文标题:物理新定律诞生,由中国科学家发现,可帮助机械臂抓住潮湿物体,有望用于机器人远程手术 | 专访
文章出处:【微信号:deeptechchina,微信公众号:deeptechchina】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
商汤科技首席科学家林达华荣获第四届中银香港科技创新奖
智能机器人从0到1系统入门课程 带源码课件 百度网盘下载
NVIDIA 携手全球机器人领导者,将物理 AI 带入现实世界

中兴通讯崔丽受邀出席2025腾冲科学家论坛
ESD测试的详细解释
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
国际类脑计算科学家Yulia Sandamirskaya教授加盟时识科技
科技感拉满!鲸启智能机器人与无人机联动,闪耀服务世界青年科学家论坛
【「AI芯片:科技探索与AGI愿景」阅读体验】+AI的科学应用
英伟达发布机器人 “新大脑”,黄仁勋:人形机器人三年普及
复合机器人:解锁实验室自动化的高精度智能引擎



评论