 卡耐基梅隆大学搭建可实现自主导航的机器人平台
卡耐基梅隆大学搭建可实现自主导航的机器人平台

卡耐基梅隆大学 Safe AI 实验室赵鼎教授团队首先基于松灵机器人提供的SCOUT MINI 机器人平台,搭建了一个可以实现自主导航的机器人平台。
近日,卡耐基梅隆大学 Safe AI Lab (人工智能安全实验室) 赵鼎教授团队分享了其在自主导航机器人领域的最新研究方向,该项目以开源自主连接和自动化研究车辆平台(OpenCAV Platform)为基础,通过搭建包括雷达、激光雷达、摄像机等一系列传感器,实现了机器人室内外导航、避障等功能。
卡耐基梅隆大学 Safe AI 实验室的成立旨在为机器人在面对不确定,实时多变,以及可能由人类参与的环境时,通过数据连接和控制单元,实现一种可靠,可验证和普遍适用的人工智能学习方法。此前,该实验室的研究主要集中在网联汽车和无人驾驶汽车(CAV)上,希望在未来实现节省燃油、减少交通事故、缓解交通拥堵,还能为老年人、身体有残障和视觉障碍的人群提供更好的出行服务,从而重塑地面交通与社会的未来。
近年来,卡耐基梅隆大学 Safe AI 实验室在自动驾驶、网联汽车和智慧城市方面的研究成果斐然,得到了国内外专家学者的认可,该实验室曾与Uber,Bosch,Denso和Toyota等知名公司展开过合作,甚至还曾和美国国家科学基金会、交通部、能源部和宾夕法尼亚州匹兹堡市进行过合作。
如今,卡耐基梅隆大学 Safe AI 实验室也将目光放到了日趋火热的低速无人驾驶板块上,并对此开展了一系列自主导航机器人领域的研究。
在卡耐基梅隆大学 Safe AI 实验室最新公布的机器人领域自主导航研究成果中,卡耐基梅隆大学 Safe AI 实验室赵鼎教授团队首先基于松灵机器人提供的SCOUT MINI 机器人平台,搭建了一个可以实现自主导航的机器人平台,同时在此基础上,搭载了其他硬件,包括工控机(Nvidia的计算平台),激光雷达,双目相机,以及一款10英寸的触摸显示屏(用于人机交互)。
借助松灵SCOUT MINI 机器人底盘配有的开源ROS控制接口和开源ROS Move Base导航包,卡耐基梅隆大学 Safe AI 实验室团队快速构建了一个可以在走廊环境以及工厂环境自主导航避障功能的实例,并顺利进行了测试。
从其网站公布的信息可以看到,用户只需在触摸屏上进行操作,即可实现建图,目标点设置,机器人定点导航和避障等功能。
据了解,未来卡耐基梅隆大学 Safe AI实验室赵鼎教授团队打算基于SCOUT MINI机器人平台以及松灵提供的Webots仿真模型,搭建一套包含多种动态物体和多机器人的仿真环境。基于这个仿真环境,可以做一些多机器人在动态环境下的协同算法,比如使用强化学习等等。此外,卡耐基梅隆大学 Safe AI实验室赵鼎教授团队还打算利用这个平台做一些和人行道上送货机器人相关的工作。
“我们看重这些研究方向主要是因为这些问题本身具有很大的挑战性,并且有非常广泛的应用场景,比如工厂中的物流机器人或者送外卖机器人等等”卡耐基梅隆大学Safe AI 实验室团队成员刘祖欣表示。
移动机器人开发需要经历多重难题,开发人员不仅需要花费大量时间在软件的融合,还需要为移动底盘、工控机、激光雷达等选型焦头烂额,对于刚入门移动机器人开发的小白更是十分不友好。
针对这一窘境,松灵机器人专门研发定制了ROS开发者套装,该套装集高性能工控、高精度LiDAR、多传感器于一身,能帮助开发人员快速实现移动机器人运动控制,通讯,导航,建图等功能,无疑是教育科研、产品预研、课题、产品论证等方向的极佳ROS二次开发实验平台。
原文标题:基于松灵SCOUT MINI平台 卡耐基梅隆大学开发自主导航机器人
文章出处:【微信公众号:新战略机器人】欢迎添加关注!文章转载请注明出处。
松灵机器人
-
机器人
+关注
关注
213文章
31455浏览量
223678 -
智慧城市
+关注
关注
21文章
4424浏览量
103001 -
自动驾驶
+关注
关注
794文章
14990浏览量
181553
原文标题:基于松灵SCOUT MINI平台 卡耐基梅隆大学开发自主导航机器人
文章出处:【微信号:robotinside2014,微信公众号:移动机器人产业联盟】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
高性能MEMS IMU:机器人自主运动的核心感知中枢
RK3576 + ROS2 SLAM建图与导航实战
江智机器人技术核心团队

AutoCore 联合贝启科技和瑞芯微,发布AutoRobo国产化机器人平台,打通“原型到量产”最后一公里

普渡机器人发布行业级四足机器人PUDU D5系列, 引领多形态具身智能发展
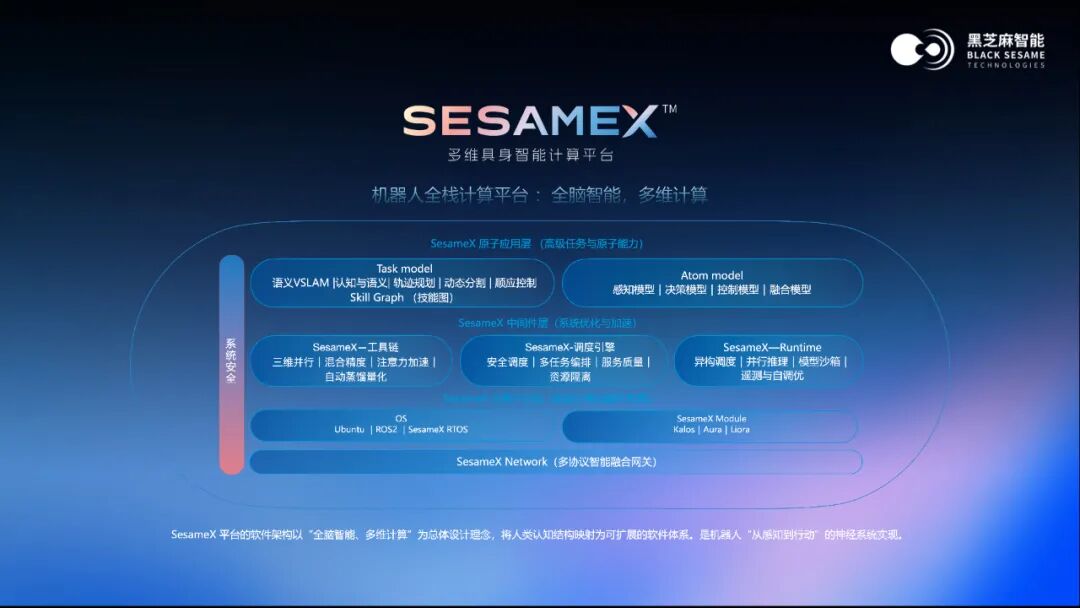
黑芝麻智能推出面向机器人产业的SesameX多维智能计算平台



评论