 搬运机器人实现避障的传感器有哪些
搬运机器人实现避障的传感器有哪些

搬运机器人是可以进行自动化搬运作业的工业机器人。是近代自动控制领域出现的一项高新技术。搬运机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,大大减轻人力成本。
搬运机器人智能化的一个重要标志就是自主导航,而实现机器人自主导航有个基本要求避障。避障是指搬运机器人根据采集的障碍物的状态信息,在行走过程中通过传感器感知到妨碍其通行的静态和动态物体时,按照一定的方法进行有效地避障,最后达到目标点。
实现避障与导航的必要条件是环境感知,在未知或者是部分未知的环境下避障需要通过传感器获取周围环境信息,包括障碍物的尺寸、形状和位置等信息,因此传感器技术在搬运机器人避障中起着十分重要的作用。避障使用的传感器主要有超声传感器、视觉传感器、红外传感器、激光传感器等。
1、激光传感器
激光传感器利用激光来测量到被测物体的距离或者被测物体的位移等参数。比较常用的测距方法是三角法测量、相位法和脉冲激光测量。三角法测量、相位法一般用于要求精度非常高的应用。脉冲激光测量适合测量精度要求不高的距离。
2、视觉传感器
视觉传感器的优点是探测范围广、获取信息丰富,实际应用中常使用多个视觉传感器或者与其它传感器配合使用,通过一定的算法可以得到物体的形状、距离、速度等诸多信息。但在图像处理中,边缘锐化、特征提取等图像处理方法计算量大,实时性差,对处理机要求高。且视觉测距法检测不能检测到玻璃等透明障碍物的存在,另外受视场光线强弱、烟雾的影响很大。
3、红外传感器
大多数红外传感器测距都是基于三角测量原理。红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来。反射回来的红外光线被检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度α,偏移距L,中心矩X,以及滤镜的焦距F以后,传感器到物体的距离D就可以通过几何关系计算出来了。红外传感器的优点是不受可见光影响,白天黑夜均可测量,角度灵敏度高、结构简单、价格较便宜,可以快速感知物体的存在,但测量时受环境影响很大,物体的颜色、方向、周围的光线都能导致测量误差,测量不够精确。
4、超声波传感器
超声波传感器检测距离原理是测出发出超声波至再检测到发出的超声波的时间差,同时根据声速计算出物体的距离。由于超声波在空气中的速度与温湿度有关,在比较精确的测量中,需把温湿度的变化和其它因素考虑进去。超声波传感器一般作用距离较短,普通的有效探测距离都在5-10m之间,但是会有一个最小探测盲区,一般在几十毫米。
责任编辑:YYX
-
传感器
+关注
关注
2577文章
55499浏览量
793920 -
搬运机器人
+关注
关注
0文章
80浏览量
13223
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
固态激光雷达参数以及避障视频
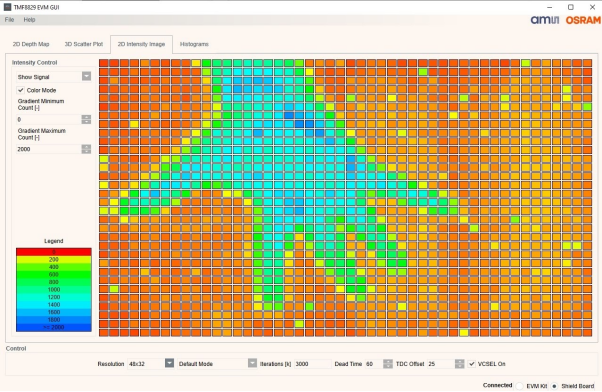
赋能机器人“慧眼”:TMF8829 48x32 多区 dToF 传感器,定义避障新高度
AGV机器人如何提升搬运效率?
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
机器人领域中的温度传感器技术及其应用:机器人温度监测,提升机器人工作稳定性





评论