 KUKA C1-C2机器人工作原理
KUKA C1-C2机器人工作原理

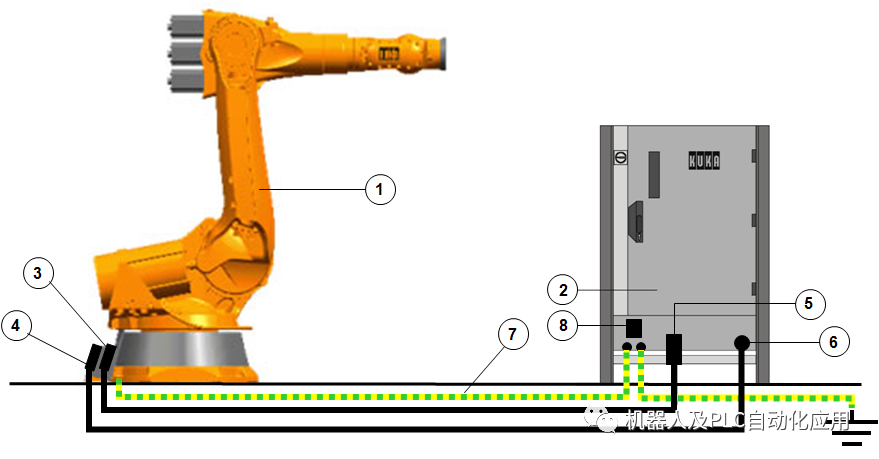
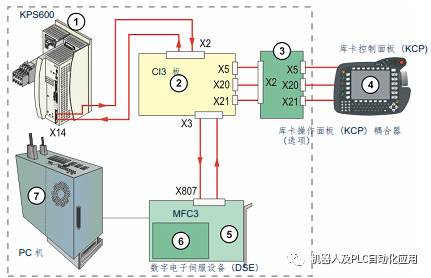
| 1 | 机器人 | 5 | 马达电缆 X20 |
| 2 | 控制柜 | 6 | 数据电缆 X21 |
| 3 | 马达电缆 X30 | 7 | 接地电缆 16 mm² |
| 4 | 数据电缆 X31 | 8 | 电源 400 V 3~ X1 |
主要内部安全监视:
电机监视: 电机通过在电机绕组中的温度探头进行过载保护.
电压监视: 如果过高或过低的电压超出了半导体放大器的允许的范围,将导致伺服驱动模块的关断.
温度监视: 控制柜的温度(内部温度)受到监视.温度超出范围将导致控制部分的关断.
点动(自动中断功能):
所有工作程序都能够在降低的速度条件下以手动的,测试运行方式来完成动作.工作程序只有在按住”START”键的情况下才能运行.一旦放开”start”键,机器人就停止动作.只有通过重新按”start”键才能继续运行工作程序.
关闭机器人控制系统
在关闭时,机器人保持停止并且机器人控制系统关机。机器人控制系统自动备份数据。
KRL 库卡机器人编程语言(KUKA Robot Language)
KSS 库卡系统软件
VxWorks 实时操作系统
电子安全回路(ESC)的安全逻辑系统
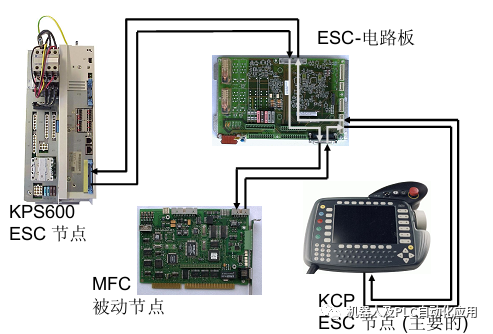
安全逻辑电路 ESC (Electronic Safety Circuit ,电子安全回路)是一种双信道、支持中央处理器的安全系统。它可对所有连接上的、与安全有关的元件进行持久监控。安全回路发生故障或中断时,驱动装置供电电源将关闭,由此可使机器人系统停止。
电子安全回路(ESC)系统由以下元件组成:
„ CI3 板
„ 库卡控制面板(KCP)(主设备)
„ KPS600
„ MFC(被动式节点)
下列输入端可监控安全逻辑电路(ESC) :
„ 局部紧急关断
„ 外部紧急关断
„ 操作人员防护装置
„ 确认
„ 驱动装置关闭
„ 驱动装置接通
„ 运行方式
„ 高级控制输入端
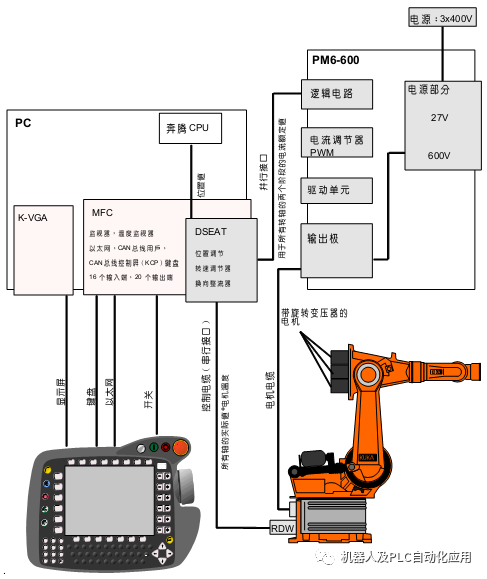
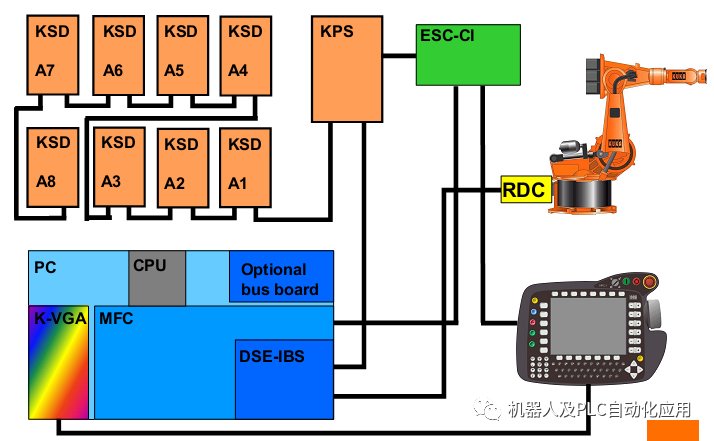
处理器以IPO时钟周期(目前C1/C2/C4都是12ms)为每台电机(从而为每根轴)计算一个新的位置值。各位置值将传送给DSEAT卡(插接在多功能卡(MFC)上)上的 第2个处理器。这个处理器将借助于一个专门的软件进行位置调节,转速调节和换向整流(相对旋转磁场的产生有相位移)。从而使调节过程数字化。
驱动模块:
数字式电流额定值将由DSEAT通过一个并行接口以125US的周期传递给驱动模块PM6-600。该数字式传递不会受外部干扰。所以,采用廉价的扁平电缆用作传递媒介足以。
电流额定值将在驱动模块中得到模拟转换并且通过电流调节器和脉宽调制器进入输出极。电流调节器采用的模拟电路,因为它相对比较容易实现,并且仅在极少数情况下必须对调节参数进行配合。
中间电路电压:
输出极的中间电路电压将直接(不通过变压器)通过电网电压(3X400V)的整流而产生.因此,中间电压在空载时为565V.所以,各输出极和电机必须按照600V的电压设计.
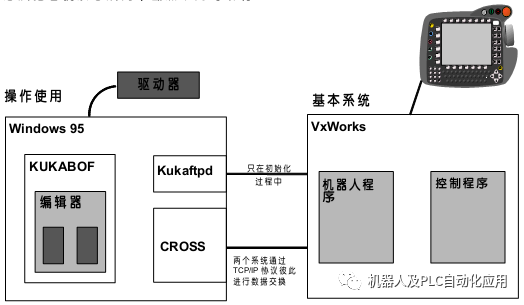
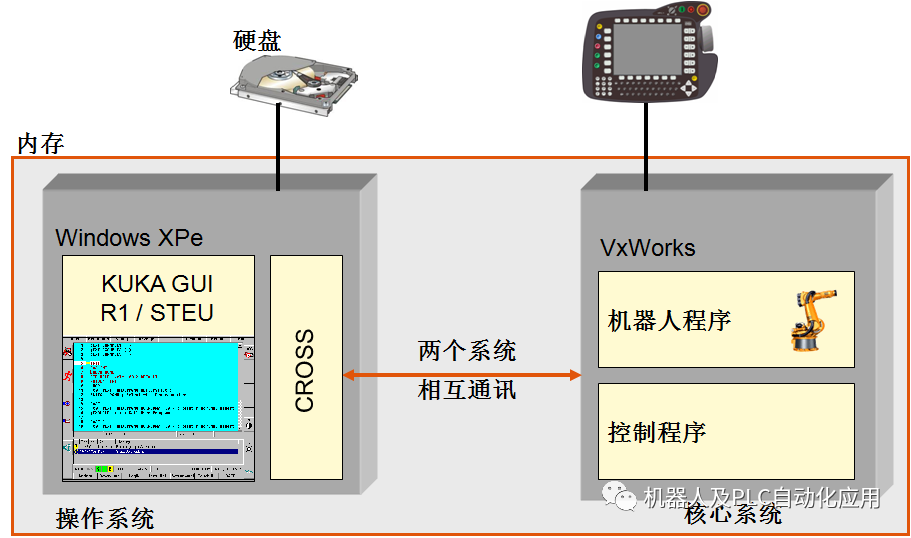
在我们的计算机内同时有2套操作系统工作:
VXWORKS :是一个实时操作系统,它负责机器人的操纵.
WINDOWS系统: 负责基本系统的操作
编程员的所有操作都通过WINDOWS系统进行!
接通电源的过程:
在接通电源时,操作系统95视窗启动,并且通过AUTOSTART启动程序STARTUP.bat(在Autostart内用“startl”表示),该程序按照给定的顺序(重要)执行下列程序:
-Kukaftpd.exe
-Upvxwin.exe
-Kukadb.exe
-Cross.exe
-Kukabof.exe
KUKA C1
KUKA C2
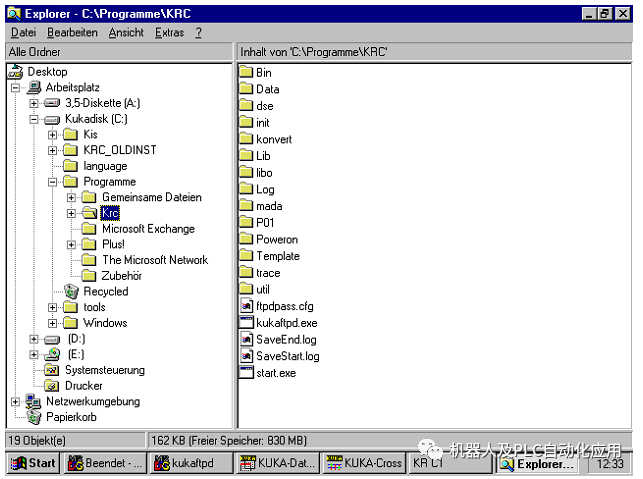
Kukaftpd.exe
目录:C: /Programme/Krc
该文件传输程序允许基本系统对PC机的硬盘进行存取操作。在开机启动过程中,基本系统将由此读入初始化等文件。Trace功能也同样通过该服务程序对硬盘进行存取。程序启动之后,它保持激活状态并且等候同其FTP-Client之间的联系。用递交参数“-d”调用程序将使得输出窗口的命令同时可见地被记录下来。
这个文件传输程序将在开机启动过程中被用到。
UPVXWIN.EXE
目录:C:/Programme/krc/bin
这个程序相应地预留储蓄空间,装载和起动基本系统。递交参数表明待预留的储存空间以及基本系统文件的名字。
调用句法:
32MB RAM:UPVXWIN.EXE-S6144-mD0000-D4000-I20000-P2560 vxworks.st用递交参数“-x”调用upvxwin将重新空出预留的储存空间。
KUKADB.EXE 存取提示数据库
CROSS.exe
Windows包括操作使用,即把指令传送给基本系统。在这里使用的程序是cross.exe
PHGSIMU.exe
模拟KCP。这个程序只用在Office(办公室)版本中。
KUKABof.exe
在控制部分的开机启动过程之后,这个程序占用整个屏幕。
在程序的标题行中没有WINDOWS下常见的按钮xxx。这样,操作者通过它既不能结束程序,也不能将它缩小成图符。由于也不能使用windows启动键和windows任务条,所以不能转换至windows。
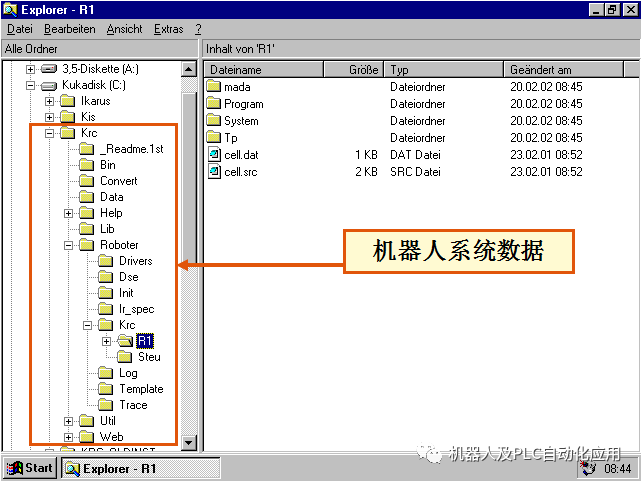
在安装完软件之后以后可以在硬盘上见到如下目录结构。
KUKA C1
KUKA C2
| $congfig.dat | Krc:/R1/system | 带常规配置数据的系统数据表 |
| Sps.sub | 提交SPS软件程序文件 | |
| Bas.src | 用于初始化等场合的基本软件包(坐标参数) | |
| Select.dat/select.src | 执行宏程序和子程序的分配程序 | |
| Vw.src | 大众公司标准程序包 |
| WEAV_DEF.src | KRC:/R1/system | 用于摆动移动的程序 |
| $machine.dat | KRC:/R1/made | 带系统变量的系统数据表,用于控制部分和机器人的配合。 |
| $operate.src | 系统文件,包括程序数据和机器人状态数据 | |
| $robcor.dat | 系统数据表,包括用于机器人动态模型数据 | |
| MACHIINE.upg/robcor.upg | 升级文件 |
| CELL.src | KRC: /R1/folgen | 通过中央SPS控制机器人的程序 |
| MAKROSAW.SRC | Krc:/R1/makros | 用于语句选择的程序 |
| MAKROSPS .SRC | 用于独立的SPS程序 |
|
VW_user.dat VW_user.src VW_user_r.dat VW_user_r.src VW_user_s.dat VW_user_s.src |
KRC:/R1/VW_USER | 考虑到同老版本的兼容性而设立,大众公司专用专家编程模块。 |
责任编辑:lq
-
机器人
+关注
关注
213文章
31527浏览量
223926 -
电机
+关注
关注
145文章
9716浏览量
154916 -
控制柜
+关注
关注
4文章
189浏览量
22470
原文标题:KUKA C1-C2机器人工作原理
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
在 VisionFive 2 上实现机器人伺服控制
E5071C矢量网络分析仪的工作原理

【ESP32-C2/C3系列】WT9901C2/C3-SN2 开发板上手指南

【ESP32-C3系列】WT32C3-S1/S2模组规格书
探索RISC-V在机器人领域的潜力
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由!
复合机器人3C行业集成方案:智能制造的创新引擎

机器人关节模组:类型、设计、工作原理及应用

3C电子行业|复合机器人物料转运及上下料解决方案

【干货】BOOST电路设计与工作原理讲解




评论