 波士顿动力机器人组团跳舞:跳舞背后的原理是什么呢
波士顿动力机器人组团跳舞:跳舞背后的原理是什么呢

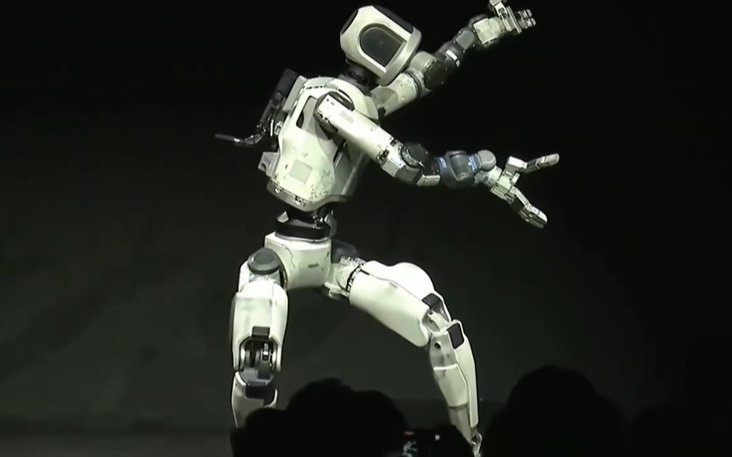
近日,波士顿动力机器人组团跳舞视频火遍全网,在视频中,波士顿动力机器人犹如人体一般的舞动画面,似乎真人肢体动作一样。对于人们而言,最为关心的是波士顿动力机器人如何保持平衡,并实现各类动作。
图片来源于“好看”视频
据了解,目前常见的有两类机器人:轮式或足式。
轮式机器人只有在平坦坚硬的地面上行驶才有理想的运动特性,如果地面凸凹程度和车轮直径相当, 或地面很软, 则它的运动阻力将大增。为了减少阻力问题,部分企业开发出履带式机器人。但不得不说的是,即使如此,这类机器人依然无法满足当前环境的要求:在有障碍的通道上,很难实现行走等动作。
而足式机器人的优越性则被进一步放大。
目前常见的足式机器人结构有两足、三足、四足、六足、八足等形式,而波士顿动力机器人则是两足和四足机器人。而两足机器人则被众多用户所看好——两足步行机器人具有最好的适应性, 也最接近人类, 故也称之为类人双足行走机器人。
而两足步行机器人在行进过程中,涉及四个状态:
静止——抬脚(重心转移)——向前迈步(惯性势能消减)——停止。
在这一系列的动作中,会采用四种操控:实时平衡控制策略、步行模式控制策略、行动预测控制策略、直立姿态控制器。
在不同的操控过程中,机器人的姿态及环境并不相同,对此,机器人必须进行自我计算,从而有效的保证自己的平衡。
而在本次波士顿动力机器人组团跳舞视频中,该机器人处于平坦位置,所需的算法也相对简单。
责任编辑:xj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31494浏览量
223809 -
波士顿
+关注
关注
1文章
62浏览量
16634
发布评论请先 登录
相关推荐
热点推荐
人形机器人“组团”上春晚,这些供应链企业功不可没
电子发烧友网报道(文/李弯弯)2026年春晚舞台将呈现一场科技与娱乐的盛宴,魔法原子、银河通用、宇树科技三家人形机器人企业先后官宣成为春晚合作伙伴。 2025年底就已有传闻,多家机器人公司或组团
春晚机器人跳舞背后:精密关节连接器的“丝滑”秘密
本文由春晚机器人惊艳全场的舞姿切入,深度解构了支撑机器人灵动关节背后的“丝滑”秘密——精密关节连接器。文章分析了在动态往复、高频传输及极端空间限制下,精密连接器如何通过弹性接触技术、高速信号优化

人形机器人爆发背后,一个被忽视的核心技术:机器人运动学控制
,有一个关键问题常常被忽略:机器人如何精准地“动起来”?这背后的核心技术就是机器人运动学(RobotKinematics)控制。在机器人系统中,运动学用于描

移远艾络迅 × 荣耀:联合推出Meteer AI跳舞机器人玩具,智能科技重新定义儿童陪伴
洞察到这一痛点,移远旗下物联网智能品牌艾络迅(Acceleronix)携手全球领先AI终端生态公司荣耀,正式推出创新型儿童AI玩具——MeteerAI跳舞机器人。

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
2026年马年春晚四家机器人公司:宇树、魔法原子、银河通用、松延动力的高动态、高精度、高可靠表现,背后离不开低温烧结银在电机驱
发表于 02-17 14:07
CES 2026机器人争霸:中国军团携全栈技术突围,波士顿动力Atlas遇劲敌
往届消费电子展(CES)上的人形机器人,仿佛是对遥远未来的精心调控式预演 —— 虽令人印象深刻,却始终局限于原型机与概念演示的安全范畴。2026 年CES上则彻底打破了这一格局,人形机器人投入到实际作业。
工业机器人TOP1,切入人形机器人赛道,意欲何为?
电子发烧友原创 工业机器人作为推动全球制造业转型的关键驱动力,近年来取得了飞速的发展。据MIR DATABANK最新数据统计,2025年Q1,中国工业机器人整体市场销量同比增长11.6%,国产

宇树科技发布H2仿生人形机器人
就在10月20日会跳舞的机器人来了,宇树科技正式发布H2仿生人形机器人,高180cm,重70kg,配以31个关节。在宇树科技展示的视频中,H2仿生人形机器人摆出专业的芭蕾舞动作;看起来
Meta重磅入局人形机器人,目标打造“机器人界的安卓系统”
在人工智能与虚拟现实领域深耕多年的Meta,正式将目光投向了人形机器人这一新兴赛道。与特斯拉、波士顿动力等公司聚焦硬件研发不同,Meta选择了一条差异化路径:不做硬件制造商,而是打造开放的软件平台。
宇树科技预告新款人形机器人:有31个关节
宇树机器人似乎要搞大事了,宇树科技发布了新款人形机器人的海报,虽然配文只有“敬请期待”几个字,但是根据海报信息显示新款机器人配备有31个关节(海报显示是6*2+3+7*2+2)。而且是一个机器
全国首届人形机器人线缆技术研讨会圆满召开!
融入社会生活的各个领域,成为推动产业升级和社会进步的重要力量。 根据高工机器人产业研究所预测,2030年全球人形机器人的市场规模预计将达到150亿美元。特斯拉、波士顿动力、宇树科技等巨
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
对话:人形机器人连接器与线缆有何攻关点?
当波士顿动力Atlas完成后空翻等高难度动作,当宇树人形机器人在春晚穿起花棉袄转起手绢,当加速进化T1机器人角逐于足球场上,人形机器人已从科

NVIDIA 通过云端至机器人计算平台驱动人形机器人技术,赋能物理 AI
。 包括 Agility Robotics、波士顿动力、傅利叶、Foxlink、银河通用、Mentee Robotics、NEURA Robotics、General Robotics、Skild AI 和小鹏机器人在内的多
发表于 05-19 17:53
•1847次阅读

盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02



评论