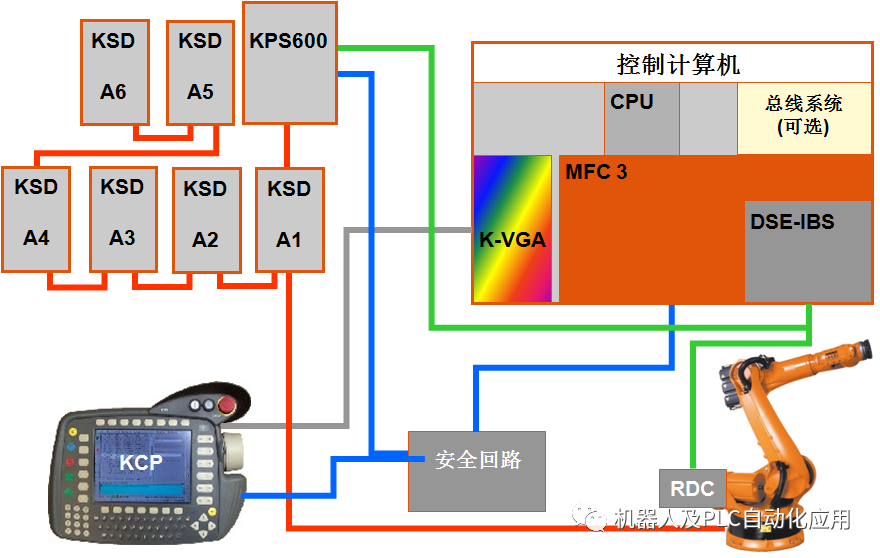
 KUKA C2中的RDW
KUKA C2中的RDW

前言:
硬盘划分为 2 个“ 逻辑” 驱动盘区。第 1 个分区用 C:、第 2 个分区用 D:
来标示。通过 IDE 1/2插头将数据线连接到主板上。跳线(Jumper)必须插在主位(Master)上。
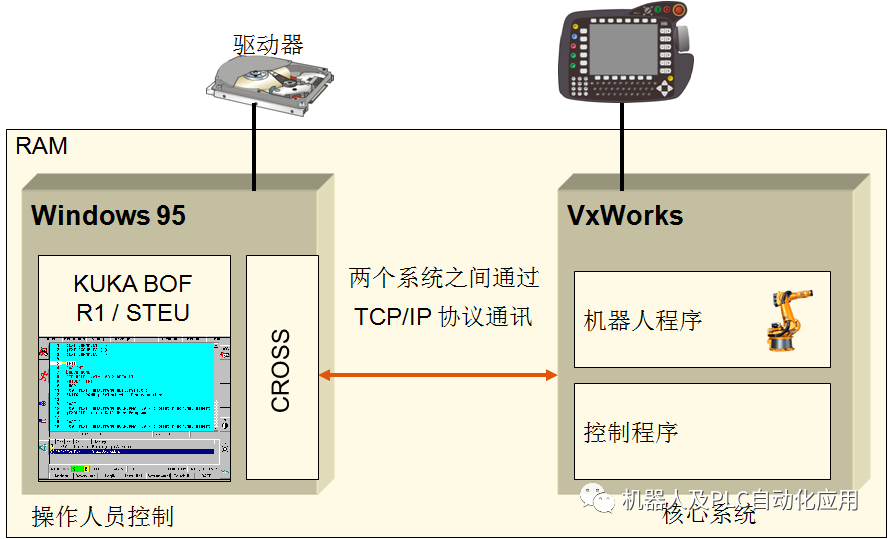
硬盘上装有以下系统:
1. KSS 库卡系统软件
2. Windows XP
3. 工艺数据包(选项)
正言:
分解器数字转换器 (RDW)
RDW:负责旋转变压器的供电、R/D转换、监视旋转变压器的断路和电机的温度。在RDW卡中的EPROM上存储机器人序列号。
机器人编号存储在变量$KR_SERIALNO中。
分解器数字转换器(RDW)单元内的 EEPROM 内容可被覆盖。该数据不能简单地通过重启系统的方式恢复。
RDW
具有一个数字信号处理器,可将模拟信号转换为数字信号,固定在机器人底座上的一个分解器数字转换器箱(RDW Box)内。
分解器数字转换器箱(RDW Box )和分解器数字转换器(RDW)电路板
RDW的功能:
产生所有需要的工作电压
为 8 个轴的分解器供电
为电机绕组中的 8 个温度传感器 (KTY 84) 进行分压供电
为最多 8 个轴进行模拟/数字转换
为 8 个温度传感器进行模拟/数字转换
自动偏差和对称性调整
对 2 条 EMT 信道进行分析
对 5 个快速测量输入端进行检测
监控分解器是否出现电流输送中断
监控电机温度
储存以下数据:
运行小时计数器
绝对位置
分解器位置
调整数据(偏差、对称)
运行小时计数器
绝对位置
分解器位置
调整数据(偏差、对称)
RDW 接口
1. X1...X8 分解器的接口(X1 用于轴 1 的分解器)
2. X10 EMT 接口
3. X11 “ 快速测量”接口
4. X9 通向 DSE 的总线接口
拆卸/安装分解器数字转换器(RDW)电路板
松开分解器数字转换器箱(RDW Box)盖上的螺栓 .
2. 小心地将分解器数字转换器箱(RDW Box)盖向侧面翻开。
3. 小心地拔下所有线缆。如果可以,则将线缆从分解器数字转换器箱(RDW Box)中完全拉出或弯向一侧。
4. 松开并取下分解器数字转换器(RDW)电路板上的 6 个固定螺丝 .
5.小心地将分解器数字转换器(RDW)电路板从分解器数字转换器箱(RDW Box)中完全拉出,注意不要倾斜。
6. 装入新的分解器数字转换器(RDW)印刷电路板。
7. 插好所有线缆。
8. 盖好分解器数字转换器箱(RDW Box)盖并拧紧。
分解器数字转换器(RDW)电路板上的 LED
1. 绿色 3.3 V 供电电压存在
2. 红色 闪烁 = 分解器数字转换器(RDW)尚未就绪
接通 = 分解器数字转换器(RDW)已作好准备
---数字电子伺服设备(DSE)及分解器数字转换器(RDW)诊断程序
按菜单顺序选择 准备运行 > 服务 > DSE-RDW
数字电子伺服设备(DSE)及分解器数字转换器(RDW)诊断程序中可使用光标键进行导航。通过 ESC键可在菜单结构内逐层向上切换。在最上层的菜单中,可用 ESC 键离开 DSE-RDW 诊断程序。
检查 RDW-DSE 通讯:
在系统信息菜单中选择 1.RDW2 > 通讯检查。
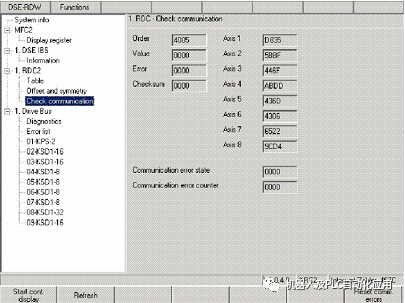
检查系统信息通讯: 分解器数字转换器(RDW)以 125 µs 的脉冲数据字段向数字电子伺服设备(DSE)传送数据。通过该功能可检查数字电子伺服设备(DSE)与分解器数字转换器(RDW )之间的通讯。
指令 :最后一个由数字电子伺服设备(DSE)向分解器数字转换器(RDW)传送的指令
值: 轴 1 至 8 的电机温度
故障 :编码器故障位及 EMT 信号的编码显示
校验总和: 所有传输数据的校验总和
轴 1 至 8 :显示轴 的分解器位置。运行期间该值会有所浮动。如分解器位置值为 0 ,则表示出现传感器故障。
通讯故障的状态 :如数据传输失败超过 3 次,则其值显示为 0001 。
通讯故障计数器: 从上次“ 恢复通讯故障” 以来所有通讯故障的总数 。
责任编辑:xj
原文标题:KUKA C2 中RDW之浅谈
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
-
机器人
+关注
关注
213文章
31482浏览量
223724 -
KUKA
+关注
关注
3文章
218浏览量
17516
原文标题:KUKA C2 中RDW之浅谈
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
AT89C51RB2/RC2微控制器:高性能8位芯片的全面解析
AT89C51RD2/ED2微控制器:特性、功能与应用详解
Onsemi FQD2N60C/FQU2N60C MOSFET:高性能N沟道增强型功率MOSFET深度解析
剖析PN5180A0xx/C1/C2:高性能多协议全NFC前端芯片的技术解析
【ESP32-C2/C3系列】WT9901C2/C3-SN2 开发板上手指南

基于FPGA的I2C控制模块设计

微控制器电路中的晶振电路

ESP32-C2 TCP数据慢
EMC共模滤波器Layout设计

深入剖析I2C协议

HUSB380B:零外围双Buck 2C和2C1A,功率分配So Easy!
一文详解CKS32K148微控制器的LPI2C模块
32.768kHz晶振电容匹配指南




评论