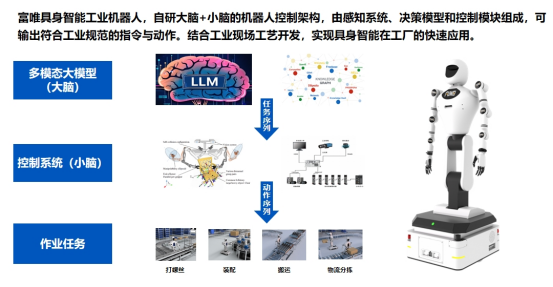
 研究人员开发了可以对机器人形状进行仿真的计算机系统
研究人员开发了可以对机器人形状进行仿真的计算机系统

对于研究人员来说,选择正确的形状对机器人穿越特定地形的能力至关重要,但是又不可能建立和测试每一种可能的形式。那如果用计算机帮忙模拟机器人的结构呢?
近日,麻省理工学院(MIT)的研究人员成功开发了一种计算机系统,利用该系统可以对机器人的形状进行仿真,并帮助确定哪种设计的效果是最优的。
举例来说,假如我们需要根据已有材料建造一个可以在有断层的路面上爬行的机器人,在设计它的外观时,我们可能希望它的身子尽可能短一些、手臂尽可能长一些,以适应这种存在断层的地面。
然而,设计出来的机器人可能并不像我们想象中那么理想。如下图所示,这款机器人在爬行过程中看起来十分吃力,而且过长的 “手臂” 也让它行动迟缓。
那我们不妨让计算机帮忙设计一下。使用 MIT 研究人员发明的系统 RoboGrammar ,我们只需把准备用到的机器人组件(如关节、连杆等)输入到系统中,再告诉系统机器人需要在什么类型的路面上行驶,RoboGrammar 就能算出多种适合的机器人结构。
就像这样,下图是 RoboGrammar 给出的其中一种设计,经过系统优化的机器人在身材比例上明显和谐了许多,爬行速度也更快了。
相关研究以 “RoboGrammar: Graph Grammar for Terrain-Optimized Robot Design” 为题,发表在了 SIGGRAPH 亚洲 2020 大会。
该论文的第一作者、麻省理工学院计算机科学与人工智能实验室 (CSAIL) 的博士生 Allan Zhao 称:“机器人设计仍然是一个非常手工化的过程。” 他将 RoboGrammar 描述为 “一种更具创造性的机器人设计方法,利用这种方法进行设计可能更高效。”
研究人员表示,这一进展可能会给设计机器人形状领域注入一定的计算机辅助创造力。
基于节肢动物的启发,研究人员开发出一种递归图形语法规则
Allan Zhao 认为,机器人是为各种无穷无尽的任务而设计的,然而 “它们的整体形状和设计往往非常相似。” 例如,“当你想制造一个需要穿越各种地形的机器人时,你可能会立刻想到一个像狗那样的四足动物,我们想知道这是否真的是最佳设计。”
Allan 的团队推测,更多的创新设计或许可以改善机器人的功能。因此,他们建立了这个计算机模型,这个模型完全不会受先前惯例的影响。尽管研究目的是为了创新,但还是需要制定一些基本规则。
因此,研究团队开发了一种递归图形语法(recursive graph grammar),用以对机器人组件的排列进行约束。例如,相邻的支腿应该用一个关节连接,而不是用另一个支腿相连。这样的规则确保至少设计是在初级水平上,每个计算机生成的设计作品都是可以工作的。
RoboGrammar 系统提供了一种递归图形语法,可以有效地生成数十万个由给定组件构建的机器人结构。然后,研究人员使用图启发式搜索和模型预测控制 (MPC) 来促进探索大的设计空间,并为给定的地形识别高性能的例子。研究人员称这一方法可以实现机器人结构和控制器的协同优化。
正如很多模仿动物外形建造的机器人一样,Allan Zhao 也表示其团队的图形语法规则同样是受到了动物的启发,尤其是那些无脊椎动物,包括昆虫、蜘蛛和龙虾等。“它们的特点是有一个节数可变的中心体,有些部分还有支腿连接。而且我们注意到,这不仅足以描述节肢动物,还可以描述更熟悉的动物形态,包括四足动物。”
于是,基于节肢动物的启发,研究人员设计了 RoboGrammar 系统,并增加了一些其他机械上的功能,例如可以使用轮子来取代机器人的 “腿”。
系统设计出的机器人并不总是最佳质量,需要控制每个机器人的运动和评估其功能
RoboGrammar 使用图形语法的规则来设计成千上万个潜在的机器人结构。有些看起来有点像赛车,有些看起来像蜘蛛,或者是像一个在做俯卧撑的人。
Allan Zhao 说:“看到各种各样的设计,我们感到倍受鼓舞。这无疑显示了图形语法的创造力。” 但是研究人员也表示,系统设计出的机器人并不总是最佳质量。而且,系统给出的设计在很大程度上基于人们输入的组件类型。
要想选择最佳的机器人设计,就需要控制每个机器人的运动和评估其功能。Allan Zhao 说,“到目前为止,这些机器人只是模型。” 该团队为每个机器人开发了一个控制器,其算法称为模型预测控制 (Model Predictive Control),以快速向前移动为优先级。控制器是一组指令,将这些结构赋予生命,控制机器人各种马达的运动顺序。
“机器人的形状和控制器是紧密相连的,这就是为什么我们必须为每个给定的机器人单独优化控制器的原因。” 一旦每个模拟机器人都可以自由移动,研究人员便可以通过 “图形启发式搜索” 来寻找高性能的机器人。
这套系统的发明,为的不是代替人们进行设计,Allan Zhao 希望能够借助这一系统激发人们的创造力。
哥伦比亚大学机械工程师、计算机科学家 Hod Lipson 虽然没有参与这个项目,但是他认为,“这项工作是 25 年来在自动设计机器人的形态和控制方面的最高成就。”“使用形状语法的想法已经出现一段时间了,但是没有哪个像这个作品一样完美地实现了这个想法。”
责任编辑:YYX
-
机器人
+关注
关注
214文章
31675浏览量
224596 -
计算机系统
+关注
关注
0文章
293浏览量
25378
发布评论请先 登录
2026全国大学生计算机系统能力大赛龙芯赛题发布
HIP6521EVAL1:奔腾4计算机系统的外设电源控制解决方案

嵌入式计算机AF208:焊接机器人高效精准作业的核心引擎

人形机器人制造业领域应用的趋势:技术突破与市场前景
人形机器人迅猛发展,可以给养老行业带来哪些利好

龙架构计算机系统能力核心课程教学研讨会圆满举行
人形机器人重复定位精度:工业柔性制造的“定海神针”
科普 | 英伟达“最强”机器人大脑平台与5G物联网完成验证测试,RedCap支持人形机器人高效连接

NVIDIA三台计算机解决方案如何协同助力机器人技术
工业计算机与商用计算机的区别有哪些

NVIDIA驱动的现代超级计算机如何突破速度极限并推动科学发展



评论