 深度解读激光雷达系统设计的eToF激光驱动器系列
深度解读激光雷达系统设计的eToF激光驱动器系列

作者:Maurizio Di Paolo Emilio
高效功率转换(EPC)宣布了用于激光雷达系统设计的eToF激光驱动器系列。新的氮化镓(GaN)系列旨在为消费类和工业领域的自动驾驶汽车和3D感测提供飞行时间(ToF)应用。
EPC的新型激光雷达将设备驱动器直接与基于GaN的激光器集成在一起。EPC首席执行官Alex Lidow解释说,这种配置几乎消除了两个元件分开时存在的所有电感。这使EPC的新激光雷达能够产生相对较快的脉冲,最终转化为更高的分辨率。
他说:“您对激光的拥抱越多越好。”
集成还可以减小传感器/驱动器组合的尺寸;新设备可以缩小到3平方毫米或小至1平方毫米。此外,根据Lidow所说,EPC可以廉价出售它们。
“性能低于1美元的激光器/驱动器,而100美元,200美元的性能如何?Lidow说,他解释了为什么他认为OEM会发现增加EPC的新激光雷达设备将是微不足道的费用,他解释说。
Lidow说,EPC已经销售了数百万个用于机器人,自动吸尘器,无人驾驶飞机和其他应用的激光雷达。Lidow认为,随着新激光雷达性能的提高以及尺寸和成本的降低,新激光雷达将对智能手机,各种先进车辆和其他产品的制造商产生吸引力。
包括摄像机。Lidow解释说,光学传感器总是要花一点时间聚焦在移动的物体上,并指出以激光速度找到物体的范围是激光雷达的根本目的。这就是为什么他设想将摄像头系统与激光雷达集成在一起。
Lidow强调了在激光雷达应用中,如何以低成本引入这个新系列与MOSFET竞争。所述EPC21601激光驱动器集成了40 V,10甲FET具有集成栅极驱动器和3.3逻辑电平输入到单个芯片中。
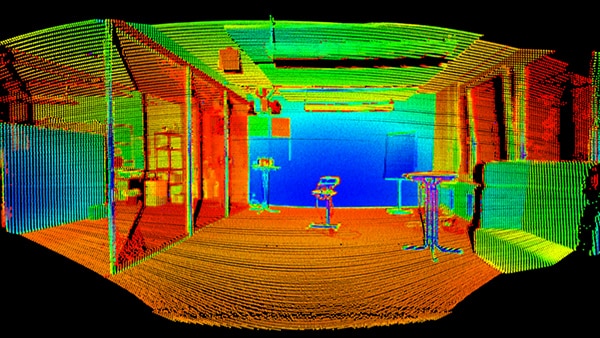
激光雷达是一种使用脉冲激光测量物体之间距离的技术,通过获取的信息可以获得3D图像。激光雷达技术可提供准确性,广域覆盖以及对数据收集的全数字支持。
事实证明,采用GaN技术的FET可用作激光开关的驱动器元件,可驱动大电流和极短的脉冲。较短的脉冲宽度可提供更高的分辨率,而高脉冲电流可使激光雷达系统达到较远的距离。Lidow表示:“ GaN技术支持这两个特性,使其非常适合激光雷达。”
激光雷达的飞行时间(ToF)
脉冲激光雷达技术用于长距离,可直接测量光子经过往返距离的时间,这称为飞行时间。Lidow说:“ ToF技术非常简单,它实质上测量了往返时间。”
在这些应用中,当您必须靠近物体时,激光信号的脉冲宽度就会出现问题。“光每三纳秒传播一米,因此,如果脉冲宽度为一纳秒,那么您实际上无法测量比一米还要近的物体,除非您要查看的是输出与输出之间的相位差。输入。因此,基本上,您查看输出脉冲,然后从返回脉冲中减去输出脉冲。因此,人们为了间接测量飞行距离而要做的就是使用大量的光功率。他们用100兆赫量级的脉冲流做到这一点。他们测量了积分脉冲流的相位差,告诉您物体有多远。” Lidow说。
他补充说:“如果您正在寻找距离几英尺远的地方,则只需使用垂直腔表面发射激光器(VCSEL),就只需大约1到10安培的电流。而且,如果您想走得更远,由于使用的是非定向光脉冲,因此功率要求会越来越大。因此,间接飞行时间往往是在近距离应用中进行操作的一种极好的机制,而不是对远处物体的有效机制。”
图1:脉冲宽度和幅度(来源:EPC)。
激光雷达
的eToF EPC21601是一款激光驱动器,使用3.3 V逻辑在高达200 MHz的高频下进行控制,以调制高达10 A的激光驱动电流。接通和断开时间分别为410 ps和320 ps。EPC21601是采用EPC专有的GaN IC技术的单芯片外加eGaN FET驱动器,芯片尺寸为1.5 mm x 1.0 mm的BGA尺寸。
它是一种40伏,10安培的FET器件,旨在通过3.3伏逻辑电平输入来驱动VCSEL。“使用两个单独的芯片而不是一个芯片时要考虑的事情之一是,两个芯片在驱动器和功率FET之间的电感约为50 Pico Henry。而且,如果您有50 Pico Henry的电感,您的速度将减半。因此,即使您降低到10或20 Pico Henry,这也很重要。驱动器和功率FET的集成将公共源电感减小到只有几个Pico Henry,从而改善了脉冲的上升和下降时间,并因此改善了非常接近的物体的分辨率。” Lidow说。
图2:EPC21601的时序性能(来源:EPC)。单击以放大图像。
EPC21601采用芯片级封装(CSP)提供,易于组装,节省了PCB空间,并提高了整体效率。Lidow说:“该产品系列将使ToF能够在更广泛的最终用户应用中更快地采用。”他补充说:“超声波传感器的检测距离不能小于30厘米。这是它们的局限性,与工作频率有关。因此,您可以在一个短距离内替换超声传感器和摄像头芯片。”EPC21601专为高速,短脉冲操作而设计,同时最大程度地减少了所需的外部零件数量。
图3:EPC21601 – 200 MHz的时序性能(来源:EPC)。点击放大图片
Lidow通过图2和3展示了一系列测试如何确认新设备在高速应用中的有效性。“在图2中,有一个10安培的脉冲串,高20伏,宽9纳秒,接通时间约为400皮秒,断开时间约为300皮秒。而且通断时间受电感限制。在这种情况下,可以解决非常短的距离。图3显示了200兆赫兹的脉冲序列。因此,在这种情况下,我们有一个1.4纳秒宽的脉冲,仍然有10安培和20伏特。从图中可以看到,这里的关闭时间是245皮秒乘以300皮秒。” Lidow说。他补充说,根据图片2和3,新的IC可以使用ToF应用中使用的任何激光技术实现非常快速的操作。
图4:演示板(来源:EPC)。单击以放大图像。
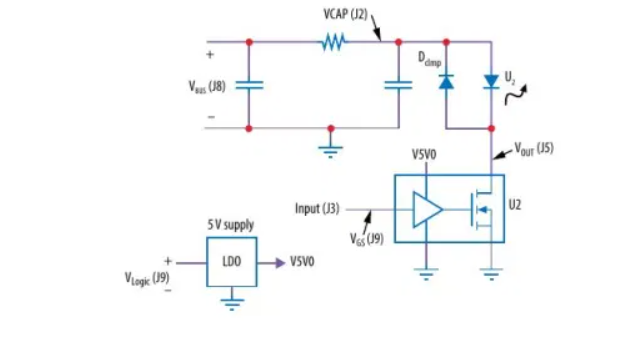
图5:EPC9154开发板的框图(来源:EPC)。单击以放大图像。
Lidow说,还有诸如EPC9154的开发板,它具有EPC21601 eToF激光驱动器IC,主要用于驱动短脉冲大电流激光二极管。功能包括最小脉冲宽度<2 ns,峰值电流> 10 A和总线电压30 V(图4-6)。EPC9154能够驱动带有电流脉冲的激光二极管,从而产生数十瓦光功率的峰值功率。考虑到设计激光雷达应用的激光二极管,但是激光封装的热限制意味着必须遵守脉冲宽度,占空比和脉冲重复频率限制。
图6:连接和测量设置(来源:EPC)。单击以放大图像。
正如Lidow指出的那样,由于特定原因,可能会影响性能的开关损耗实际上并不会显着影响散热问题,因为激光器是在突发模式下使用的。因此,它会周期性地发出200兆赫兹的脉冲流,可能以100赫兹或10赫兹的速度,这取决于您要实现的帧速率。而且在每种情况下,激光都是热极限,” Lidow说。
他补充说:“作为竞争对手,我看到了MOSFET。硅MOSFET的成本非常低,人们对此非常熟悉。但是高频和功率密度的出现将在应用中受到限制。例如,在电机驱动器中,我们现在看到GaN的大幅增加,因为对于低电压,电机的频率从20kHz上升到100kHz。对于新一代汽车,它们需要4或5千瓦,而最好的MOSFET需要4千瓦,因此需要具有MOSFET的7相降压转换器。GaN可以分四个阶段完成,从而节省了空间并提高了效率。”
消费电子行业将受益于这种新型的eToF,既包括豪华机器人,也包括其他较便宜的机器人。所有人都装有激光雷达,以确保它们不会撞到错误或准确知道要在哪里检测位置。无人机将看到这些解决方案的使用,将增加其在地面识别应用中的市场。
— Brian Santo对本文做出了贡献。
编辑:hfy
-
GaN
+关注
关注
21文章
2331浏览量
79244 -
光学传感器
+关注
关注
8文章
235浏览量
61566 -
无人机
+关注
关注
234文章
11139浏览量
193335 -
激光雷达
+关注
关注
978文章
4378浏览量
195382 -
3d感测
+关注
关注
3文章
36浏览量
7145
发布评论请先 登录
CES 2025激光雷达观察:“千线”激光雷达亮相,头部厂商布局具身智能

禾赛科技与理想汽车续签激光雷达合作
纳芯微栅极驱动器NSD2017在激光雷达应用中PCB设计的注意点

800线!禾赛发布ETX激光雷达

SPAD席卷车载激光雷达市场
了解驱动器、开关和激光二极管在实现有效激光雷达性能方面的作用
激光雷达调研纪要
DeepSeek:2025年激光雷达技术与行业应用趋势


禾赛拒绝“激光雷达无用论”

一则消息引爆激光雷达行业!特斯拉竟然在自研激光雷达?
激光雷达,明年要降价至200美元

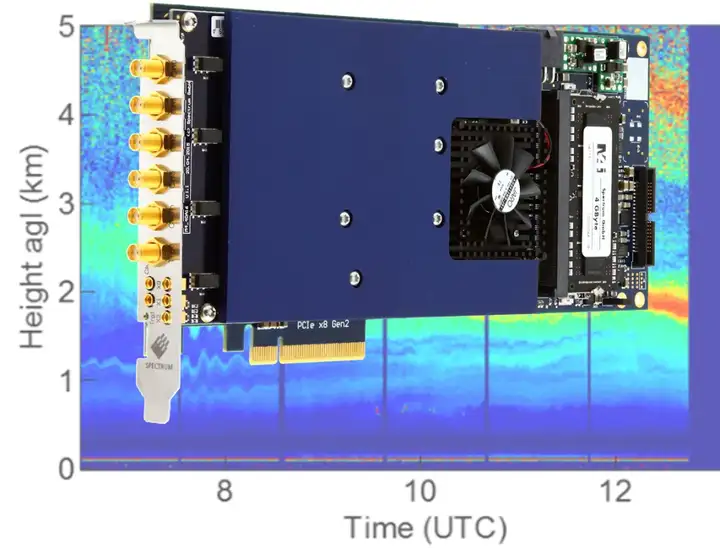
全场景适用!TS Spectrum高速数字化仪在激光雷达系统中的应用





 工商网监
工商网监
评论