 浅谈PID微分器与滤波器
浅谈PID微分器与滤波器

0 前面的话
这篇文章肝了好久,控制有时候给人的感觉是披着数学外衣的,但是脱下外衣,发现还是控制,本文有一些基本的推导,无非是为最后的算法C实现做铺垫,最终目的是能在实践中进行应用和系统调优。
目录
0 前面的话
目录
1 先说噪声
2 噪声对于系统的影响
4 加入滤波器
4.1 传递函数
4.2 串联微分的等效形式反馈积分
5 C语言实现
6 参考
1 先说噪声
在电子设备等电路系统中,噪声是不被系统需要的电信号;电子设备产生的噪声会由于多种不同的影响而产生很大的差异。在通信系统中,噪声是一个错误或不希望出现的随机干扰从而作用于有效的信号。
2 噪声对于系统的影响
噪声出现的第一个场景,当我们在教室里做英语听力,然后旁边的同学手机忽然来了一条短信,这时候往往可以听到放英语听力的喇叭会被干扰,然后会发出哔哔哔的声音;
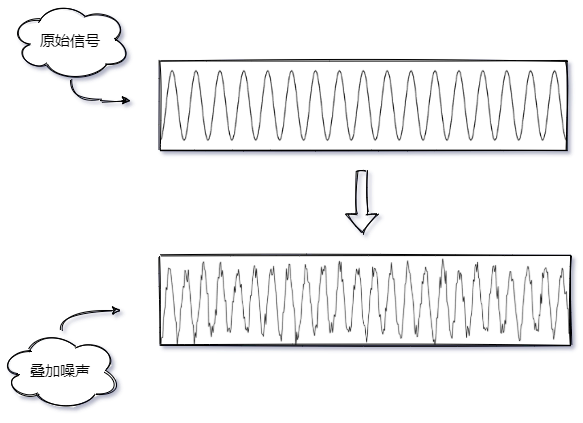
下面是一个正弦信号跌加噪声的例子,在原始信号上叠加一定幅度的高斯噪声,可以看到信号不再像原来的正弦信号那样完美,具体如下图所示;
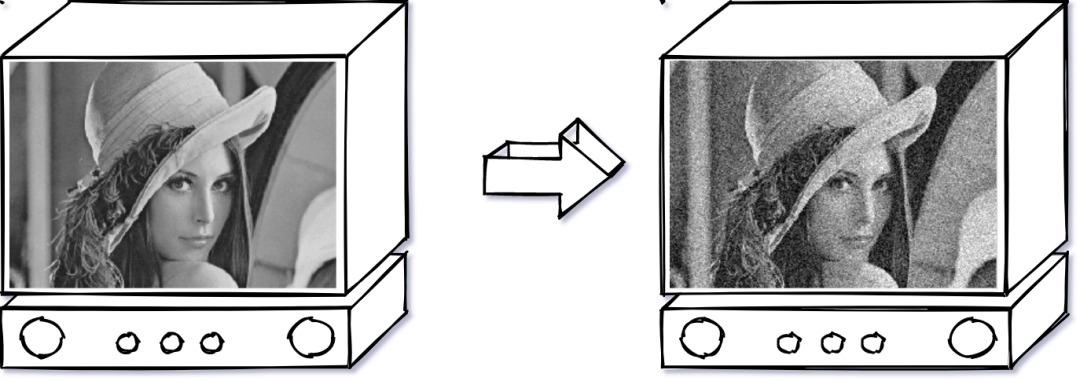
或者,很久很久以前,数字电视还没有普及,那时候的显像管的黑白电视,也容易出现这样的雪花一样的噪声,叠加在图片上就会出现这样的效果,具体如下图所示;
从上述的例子中可以看到,噪声往往会对系统造成一定程度的影响,但是如果噪声的幅度减小到一定程度,对于系统的影响可能就没有那么容易被发现。
下面做一个实验;在一张黑色图片上叠加幅度很小幅度的高斯噪声;从第二张图片中发现噪声没有影响到整体图片;
然后我尝试提高了整幅图片的亮度,发现,噪点便开始出来了,这像极平时那些枪版影片的马赛克画质;整体的实验结果如下图所示;

3 对于PID控制器的影响
既然噪声的幅度减小到一定程度,对于系统的影响可能就没有那么容易被发现,那么对理想的PID控制器又有什么影响呢?
不要忘了,在理想PID控制器中,微分控制器会对偏差的变化率(斜率)进行累加,从而产生积分器的输出;
对于微分器来说,即使噪声幅度足够小,但是只要达到足够高频率,偏差的变化率一样可以变得很大,下面举个例子;
这里有一个固定频率和赋值的噪声为信号1,这个信号可以表示为:
于是我们尝试将信号1的幅度减半,频率变为原来的两倍,得到了信号2:
以此类推,在信号2的基础上,幅度再减半,频率乘以2,得到信号3:
简单画了一下这个信号,具体如下图所示;
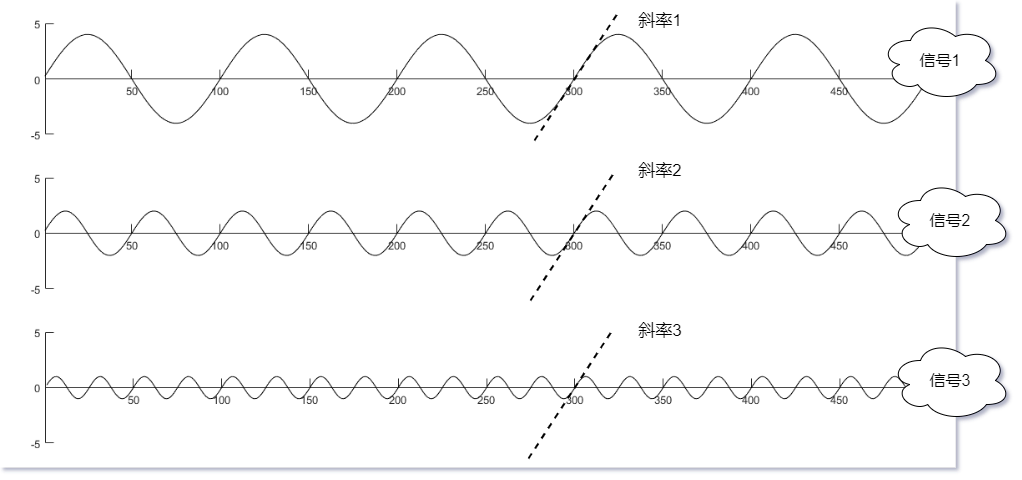
假设分别取三个信号位于该点的斜率,从图中可以看到,斜率1,斜率2,斜率3是相同的,简单验证一下,在时刻,可以得到:
所以这里就是求复合函数的微分,由于选取的点比较特殊,发现最终计算得到的结果,因此也可以发现,即使减小了噪声的幅度,但是对于较高频率的噪声,依然会产生较大斜率。
遇到高频噪声,那么微分器会产生较大的输出,从而最终对系统造成影响,这是我们不希望出现的结果,因此在反馈回路中并不希望高频噪声进入PID控制器的计算,这里就需要低通滤波器将噪声滤除。
4 加入滤波器
低通滤波器可以滤除高频信号,这样保留了有效信号,可以设置所需的截止频率;系统处理有效信号,由于低频部分信噪比较高,因此噪声对于系统的影响较小,而高频部分,信噪比就很低,这时候对于系统来说,噪声就会造成不小的影响,具体如下图所示;
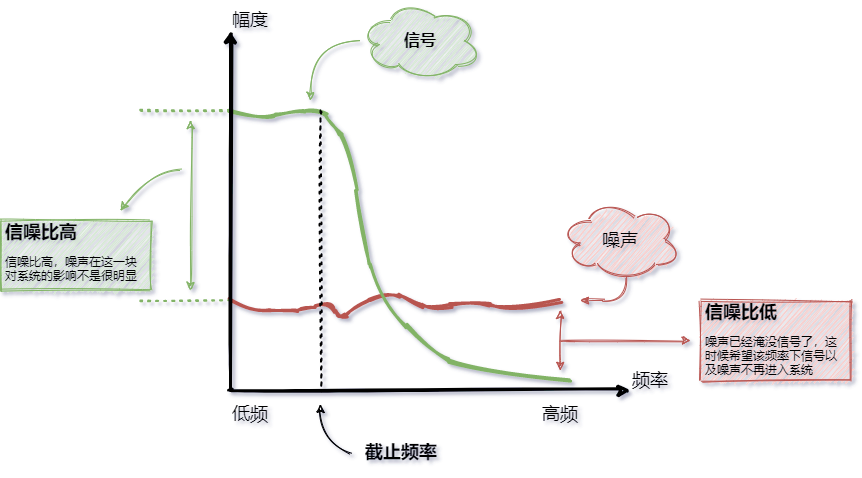
信噪比:有效信号和噪声的比值,英文名称叫做SNR或S/N(SIGNAL-NOISE RATIO);
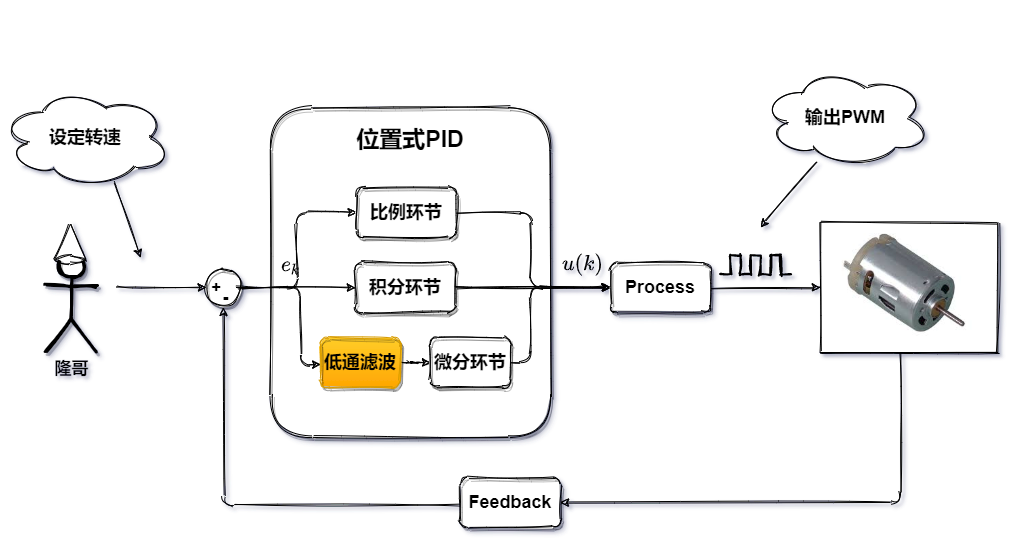
所以下面我们会在PID控制器的微分部分加入低通滤波器,这样对反馈的信号进行一部分处理,从而减小系统干扰,如下图所示;
4.1 传递函数
概念:拉普拉斯变换是对于 函数值不为零的连续时间函数 通过关系式 (式中为自然对数底的指数)变换为复变量的函数。它也是时间函数的“复频域”表示方式。
也就是说拉式变换可以将时域关系变换到频域中,这样可以便于系统进行分析。
下面是本文下面会用到的时域函数对应的拉普拉斯变换:
积分:
微分:
低通滤波器的传递函数:
低通滤波器中的截止频率即为,单位是;
4.2 串联微分的等效形式反馈积分
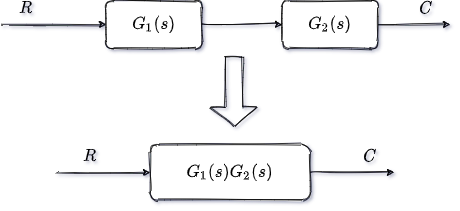
串联等效传递函数的关系为,两个方框串联等于各个方框传递函数的乘积;具体如下所示;
因此低通滤波串联微分的传递函数为:
闭环负反馈的等效传递函数的关系如下所示;

这里我们可以使用负反馈积分的方式,构建等效于串联微分的传递函数,最终的传递函数结果是相同的,具体如下图所示;
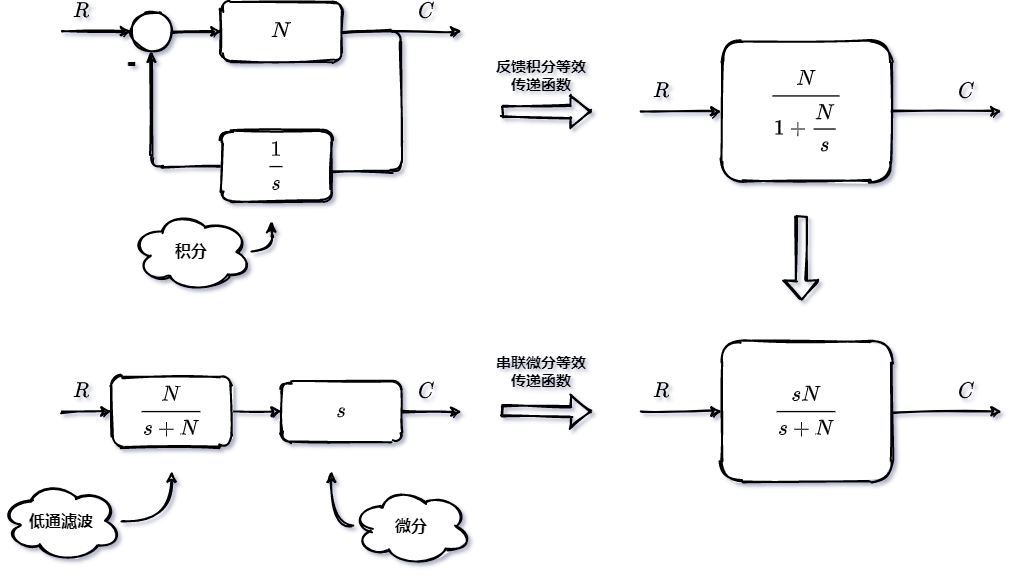
串联微分的形式,可能在算法的实现上会更加直观,但是会比较费资源;
使用负反馈积分的等效形式进行实现,则进一步减少了算法的资源消耗,下面给出一个TI公司的PID算法实现就是通过负反馈积分的等效形式进行实现的。
5 C语言实现
这里直接使用了TI公司的PID算法,对于微分部分做了滤波的处理,并且使用的是负反馈积分的方式,具体可以参考controlSUITElibsapp_libsmotor_controlmath_blocksv4.2pid_grando.hPID控制器的整体框图如下所示,我们只关心微分部分;
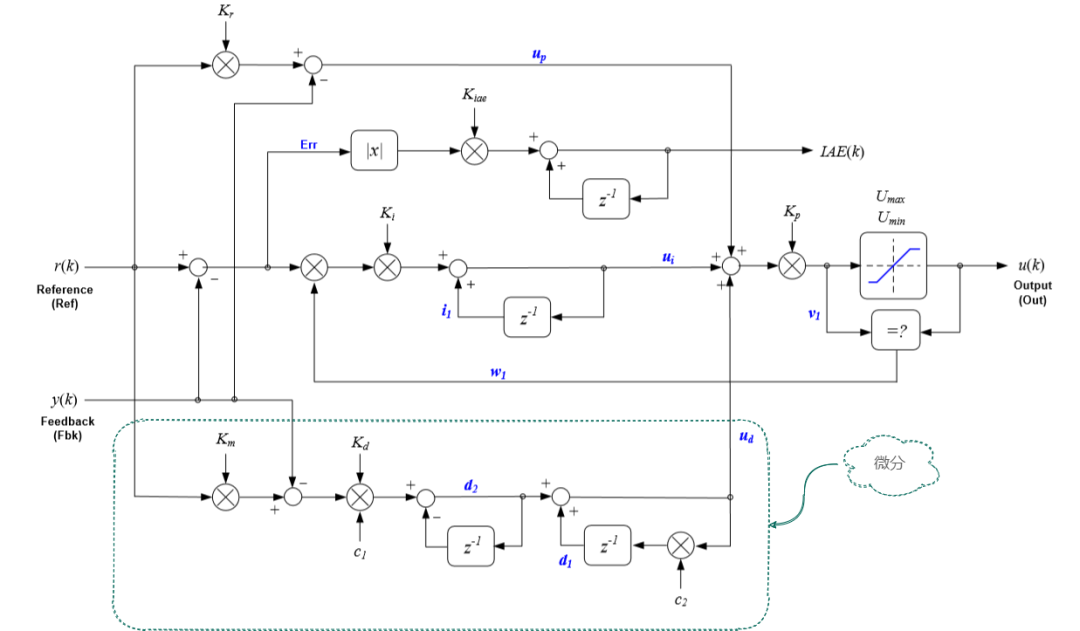
首先可以发现满足:
这里滤波器有两个系数和,它们必须满足截止频率(单位Hz)和采样周期(单位秒)以下的关系:
C语言实现如下:
/*================================================================================= Filename:PID_GRANDO.H ===================================================================================*/ #ifndef__PID_H__ #define__PID_H__ typedefstruct{_iqRef;//Input:referenceset-point _iqFbk;//Input:feedback _iqOut;//Output:controlleroutput _iqc1;//Internal:derivativefiltercoefficient1 _iqc2;//Internal:derivativefiltercoefficient2 }PID_TERMINALS; //note:c1&c2placedheretokeepstructuresizeunder8words typedefstruct{_iqKr;//Parameter:referenceset-pointweighting _iqKp;//Parameter:proportionalloopgain _iqKi;//Parameter:integralgain _iqKd;//Parameter:derivativegain _iqKm;//Parameter:derivativeweighting _iqUmax;//Parameter:uppersaturationlimit _iqUmin;//Parameter:lowersaturationlimit }PID_PARAMETERS; typedefstruct{_iqup;//Data:proportionalterm _iqui;//Data:integralterm _iqud;//Data:derivativeterm _iqv1;//Data:pre-saturatedcontrolleroutput _iqi1;//Data:integratorstorage:ui(k-1) _iqd1;//Data:differentiatorstorage:ud(k-1) _iqd2;//Data:differentiatorstorage:d2(k-1) _iqw1;//Data:saturationrecord:[u(k-1)-v(k-1)] }PID_DATA; typedefstruct{PID_TERMINALSterm; PID_PARAMETERSparam; PID_DATAdata; }PID_CONTROLLER; /*----------------------------------------------------------------------------- DefaultinitalisationvaluesforthePIDobjects -----------------------------------------------------------------------------*/ #definePID_TERM_DEFAULTS{ 0, 0, 0, 0, 0 } #definePID_PARAM_DEFAULTS{ _IQ(1.0), _IQ(1.0), _IQ(0.0), _IQ(0.0), _IQ(1.0), _IQ(1.0), _IQ(-1.0) } #definePID_DATA_DEFAULTS{ _IQ(0.0), _IQ(0.0), _IQ(0.0), _IQ(0.0), _IQ(0.0), _IQ(0.0), _IQ(0.0), _IQ(1.0) } /*------------------------------------------------------------------------------ PIDMacroDefinition ------------------------------------------------------------------------------*/ #definePID_MACRO(v) /*proportionalterm*/ v.data.up=_IQmpy(v.param.Kr,v.term.Ref)-v.term.Fbk; /*integralterm*/ v.data.ui=_IQmpy(v.param.Ki,_IQmpy(v.data.w1, (v.term.Ref-v.term.Fbk)))+v.data.i1; v.data.i1=v.data.ui; /*derivativeterm*/ v.data.d2=_IQmpy(v.param.Kd,_IQmpy(v.term.c1, (_IQmpy(v.term.Ref,v.param.Km)-v.term.Fbk)))-v.data.d2; v.data.ud=v.data.d2+v.data.d1; v.data.d1=_IQmpy(v.data.ud,v.term.c2); /*controloutput*/ v.data.v1=_IQmpy(v.param.Kp, (v.data.up+v.data.ui+v.data.ud)); v.term.Out=_IQsat(v.data.v1,v.param.Umax,v.param.Umin); v.data.w1=(v.term.Out==v.data.v1)?_IQ(1.0):_IQ(0.0); #endif//__PID_H__
6 参考
https://en.wikipedia.org/wiki/Low-pass_filter
自动控制原理 第五版 胡寿松 P47
虽然写的不一定是最好,但是每一个字、每一个公式都是用心码的,每一张图都是用心画的,每一句话都是加入了自己的理解;另外笔者能力有限,文中难免存在错误和纰漏,望轻拍指正。
责任编辑:xj
原文标题:PID微分器与滤波器的爱恨情仇
文章出处:【微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
-
滤波器
+关注
关注
162文章
8464浏览量
186236 -
PID
+关注
关注
38文章
1505浏览量
91889 -
微分器
+关注
关注
0文章
16浏览量
7043
原文标题:PID微分器与滤波器的爱恨情仇
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
输入滤波器 vs 输出滤波器:核心差异解析


屏蔽电源滤波器的分类


村田通信设备滤波器:特性与应用全解析
交流单相滤波器与三相滤波器的核心区别解析
村田(muRata)通信设备滤波器产品解析
通信设备滤波器选型指南:Murata多层LC滤波器详解
通信系统中滤波器的种类及特点(1)

电源滤波器设备超标的原因

有源滤波器与无源滤波器的区别
GNSS 低噪声放大器前端模块,集成前滤波器和后滤波器 skyworksinc

滤波器厂家分享:开关插座式滤波器线材连接和弹片安装小技巧
Sky5® 低电流 GNSS LNA 前端模块,集成前置滤波器和后置滤波器 skyworksinc



评论