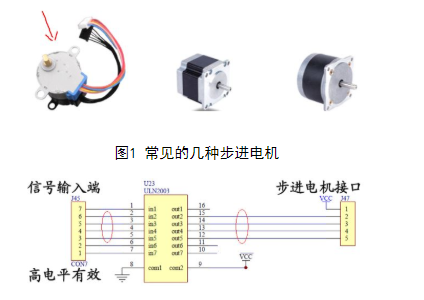
 步进电机驱动方式及实现代码
步进电机驱动方式及实现代码

一、大致介绍:
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。

二、常用术语
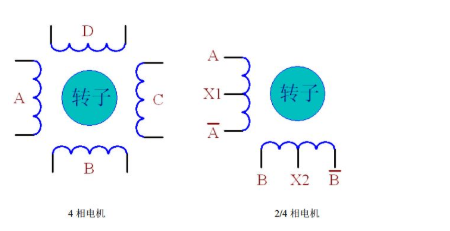
1、相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
2、拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
3、步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
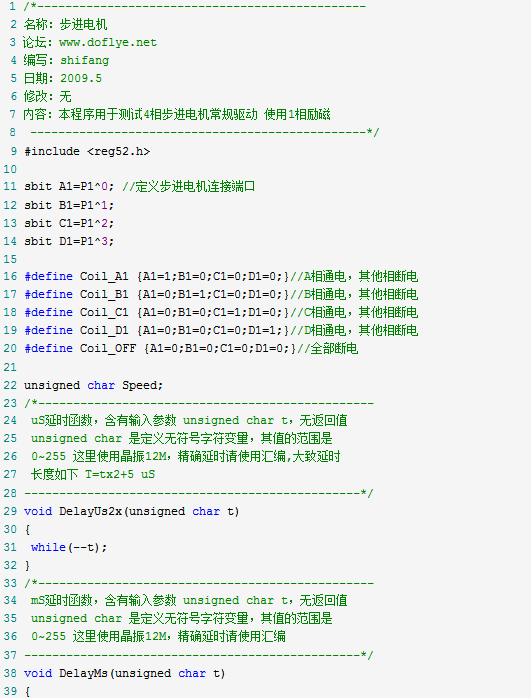
三、驱动方式
1、1相励磁法:每一瞬间只有一个线圈相通,其它休息。(优点)简单,耗电低,精确性良好。(缺点)力矩小,振动大,每次励磁信号走的角度都是标称角度。
2、2相励磁法:每一瞬间有两个线圈导通。(优点)力矩大,震动小。(缺点)每励磁信号走的角度都是标称角度。
3、1-2相励磁法:1相和2相交替导通。(优点)精度较高,运转平滑,每送一个励磁信号转动1/2标称角度,称为半步驱动。(前两种称为4相4拍,这一种称为4相8拍)
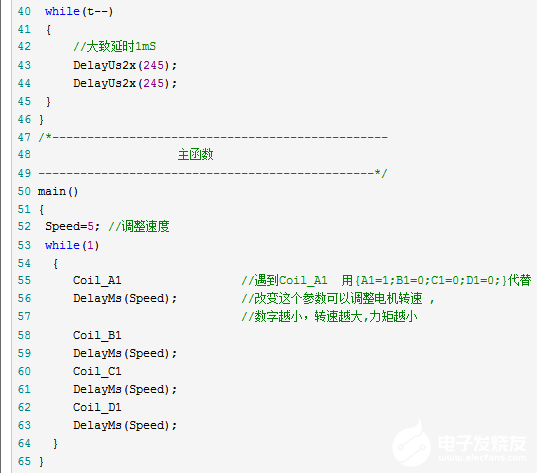
三、代码
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
步进电机
+关注
关注
152文章
3220浏览量
151616 -
脉冲信号
+关注
关注
6文章
404浏览量
38287 -
控制电机
+关注
关注
0文章
249浏览量
19129
发布评论请先 登录
相关推荐
热点推荐
Trinamic步进电机驱动芯片有哪些优点?
在医疗检测设备的精准运转、3D 打印机的细腻成型等场景中,步进电机的稳定表现直接影响设备整体效能,而驱动芯片作为步进电机的核心控制部件,其性
Trinamic步进电机驱动芯片有哪些优点?
Trinamic步进电机驱动芯片低噪音・稳运行・久耐用在医疗检测设备的精准运转、3D打印机的细腻成型等场景中,步进电机的稳定表现直接影响设备

泡沫起升仪步进/伺服电机细分驱动技术:实现冲程毫米级定位的电子方案
在泡沫起升仪的冲程控制中,毫米级定位精度是保障泡沫输出稳定性、作业位置准确性的关键。步进伺服电机细分驱动技术作为核心电子方案,通过优化电机运行的控制逻辑,将

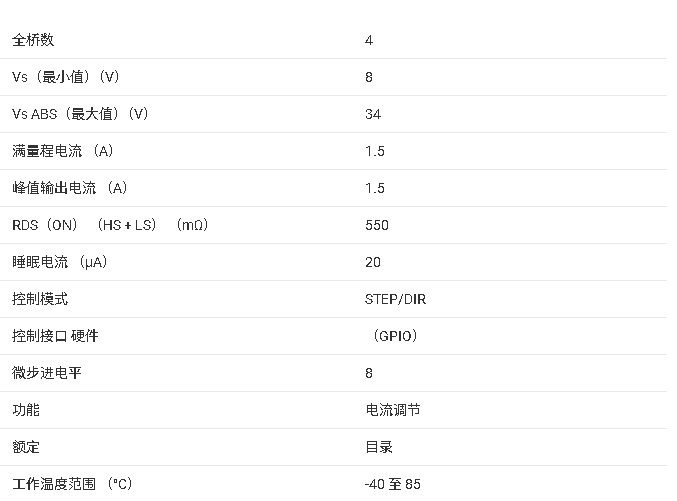
HR4988微特步进电机驱动器:高效便捷的驱动解决方案
在自动化设备、智能机器人、精密仪器等领域,步进电机的稳定驱动是保障设备精度与可靠性的核心环节,而HR4988作为一款内部集成译码器的微特步进电机
HR4982微特步进电机驱动器:高效便捷的驱动解决方案
,成为了这类应用场景中的理想选择。它不仅从设计层面简化了驱动流程,更在性能参数与功能保护上实现了全面兼顾,为步进电机的高效运行提供了坚实支撑。 从基础性能与核心设计来看,HR

DRV8821 双路步进电机控制器与驱动器技术文档总结
该DRV8821提供双微步进步进电机控制器/驱动器 打印机、扫描仪和其他办公自动化设备应用的解决方案。
两个独立的步进电机


步进电机的控制实现方法
步进电机,作为一种将电脉冲信号转换为相应角位移或线位移的电动机,是现代数字控制系统中不可或缺的重要组件。其工作原理基于电磁学原理,通过接收数字控制信号(电脉冲信号)并转化为机械位移,

微型步进电机:现代科技中的精确动力源泉
微型步进电机作为一种精密控制的电动机,在现代科技中扮演着至关重要的角色。它以高精度、可控性强、低成本等优势,被广泛应用于各种自动化设备和精密仪器中。从3D打印机、机器人,到医疗设备、消费电子产品,微型

步进电机的详解解答
步进电机,别名脉冲马达,是一种将电脉冲信号转变为角位移或线位移的开环控制电机。它是现代数字程序控制系统中的主要执行元件,广泛应用于数控机床、智能仪器和自动控制等领域。
步进电机分类
一、按励磁方式分类: 1)反应式步进电机(VR) 特点:可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高); 步距角小(最小





 工商网监
工商网监
评论