 KUKA机器人电伺服焊钳时是如何进行焊钳力的控制
KUKA机器人电伺服焊钳时是如何进行焊钳力的控制

我们在学习KUKA机器人电伺服焊钳时是如何进行焊钳力的控制,进行加紧的呢?
以下是焊钳在执行力时进行的加紧力控制!
例:
GLOBALDEF SGM_MOVE_TO_FORCE (FORCE :IN, MovementType:IN, GunClosingReason:IN, SGEQ_ParamSet:IN, SGRS_ParamSet:IN )
移动焊钳到使用力
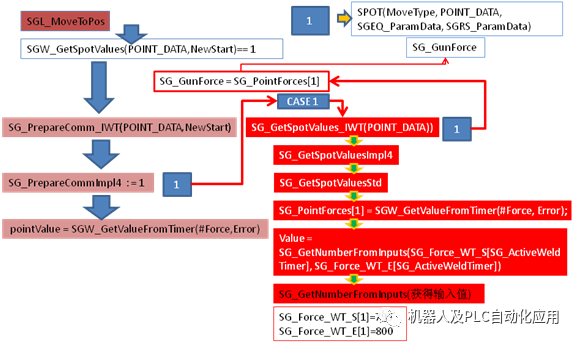
力值的给入时序图:
IF(ServoGun[SG_ActiveGunNumber].GunControl == #Force)THEN
由于ServoGun[1]= #Position所以不执行力模式
ACTIVATE_FORCE_MODE((6+SG_ExtaxActive), FORCE, SGL_CalcPartPos(SG_CurrentCmd),SGEQ_AFM_ConstSpeedUser)
ENDIF
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
KUKA机器人
+关注
关注
4文章
144浏览量
10107
原文标题:KUKA控制力的函数ACTIVATE_FORCE_MODE()
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
“盲动”变成“感知运动”
普通机器人靠编码器控制位置,只能“按死命令走”。而关节扭矩传感器实时测量每个关节受到的扭转力,精度可达0.01牛米,采样频率高达1000赫兹(每秒反馈1000次)。这相当于
发表于 04-17 17:27
在 VisionFive 2 上实现机器人伺服控制
据StarFive介绍,开发者已经在VisionFive/VisionFive 2上成功实现了机器人伺服控制,具体说明如下:
1. Preparation
Development board
发表于 03-05 07:09
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
科技:《武 BOT》:H2人形机器人31个高精度关节、单臂7自由度,完成醉拳、双截棍、舞剑,同步误差**< 0.1秒;核心是高功率密度伺服电机+高速控制+**强散热。
**魔法原
发表于 02-17 14:07
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
处理器,支持 1.8 GHz 主频,并集成2Tops NPU、G2D、VPU 4K高清视频编解码器,为复杂控制算法与视觉融合计算提供充足算力。米尔MYD-LT536开发板
在“高精度机器人控
发表于 11-14 15:48
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
,以其"三屏异显"和"八路摄像头"的强悍能力,为机器人开发者提供了前所未有的强大算力平台。米尔电子基于其MYD-LR3576
发表于 10-29 16:41
精准控制,高效运行:永铭电容器在工业机器人伺服电机驱动器中的重要角色
随着工业自动化需求的提升,工业机器人已经广泛应用于各个生产环节,成为提升自动化水平和生产效率的重要工具。伺服电机作为工业机器人的核心部件,通过控制器对编码器反馈的位置信号

人形机器人伺服电机驱动器新动力:高性能电容器的协同作用
PART1人形机器人心脏:伺服电机驱动器随着人工智能和机器人技术的飞速发展,人形机器人正逐步成为智能制造和未来生活的新伙伴。在这一领域,
集成多摩川磁性编码器的伺服电机与机器人关节设计创新
在科技日新月异的今天,机器人正以前所未有的态势融入我们的生产生活。从工业流水线上不知疲倦的机械臂,到家庭中灵活可爱的扫地机器人,它们的身影无处不在。而在机器人的核心部件中,伺服电机和
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
2025 世界人形机器人运动会于 8 月 17 日圆满收官,赛场上机器人在跑步、跳跃、抓取等项目中的精彩表现,背后是运动控制、环境感知等技术的迭代升级。而在这些技术中,磁传感器芯片凭借独特优势,成为
发表于 08-26 10:02
MT6701绝对式磁编码器优化机器人关节伺服控制
在当今科技飞速发展的时代,机器人已经广泛应用于工业制造、物流配送、医疗服务等众多领域。而机器人关节伺服控制作为机器人运动的关键技术,其性能的
工业机器人的特点
机器人是关键。工业互联网是通过端上的数据传输,经过大数据分析和云计算处理,再进行智能化决策的一整个过程,其中端的数据传输是基础。工业互联网的端包括机器人、传感器等一切线下连接端口。因此发展工业
发表于 07-26 11:22
当机器人遇上“语言障碍”:CCLINKIE转Profinet的“破冰外挂”来啦\\!
”才到机器人控制器,焊接精度从±0.1mm“漂移”到±0.3mm。直到一次技术改造,让不同协议的设备实现了“无障碍对话”,这场工业互联的破局战,藏着哪些硬核逻辑?
一、协议壁垒下的生产痛点
某合资车企
发表于 06-04 14:31
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
带)定位、Wi - Fi 定位等。蓝牙定位可以通过与机场内部署的蓝牙信标进行通信,获取机器人的大致位置信息。UWB 定位则利用超宽带信号实现更精确的定位,能够在复杂的室内环境中达到较高的定位精度,误差可控制
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
出有用的信息,如障碍物的位置和形状。对于摄像头数据,可以使用 OpenCV 等图像处理库进行图像识别、目标跟踪等操作,为机器人的导航和决策提供支持。
运动控制:运动控制是
发表于 04-27 11:24



评论