 禾赛实现技术突破,为自动驾驶技术发展助了一把力
禾赛实现技术突破,为自动驾驶技术发展助了一把力

2009年,谷歌的秘密实验室Google X成立了一个课题组,叫做Project Chauffeur (专业司机),把一辆丰田Prius装满了摄像头和激光雷达,让它沿着101公路从谷歌园区向北开过了旧金山,向南开进了旅游胜地蒙特雷,完成了总里程超过1000英里的“谷歌创始人挑战”,引起了硅谷的轰动,也把“自动驾驶Autonomous Driving”这个词带入了主流的硅谷科技圈。
一晃十多年,包括行业老大Waymo(前Project Chauffeur)在内,大家都意识到“快速上量比想象中要难”。开放道路场景比预想要复杂,Corner Cases比想象中要多。与此同时,现有的激光雷达还不能做到对360°环境精细准确的扫描和感知。以典型的64线Robotaxi的主雷达为例,在200米外看一辆车,有效点数只有大约10个。一辆自动驾驶汽车每秒钟都需要用如此局限的信息做成百上千次判断和驾驶决策,其难度可想而知。
激光雷达之所以被誉为自动驾驶“皇冠明珠”,客观上是因为它的性能成了自动驾驶的一个重要瓶颈。每当新一代激光雷达面世,不管再贵再缺货,全球顶尖自动驾驶公司都会蜂拥而至。从他们的角度来看,当竞争对手端着枪和炮时,自己不能只有大刀长矛。甚至一向以软件能力著称的谷歌Waymo,也独立开发出了自家的激光雷达,据说是因为“市面上的激光雷达都不够好”。而以禾赛为代表的新一代激光雷达供应商,以超高的性能和量产能力,逐步进入主流Robotaxi玩家的视野。
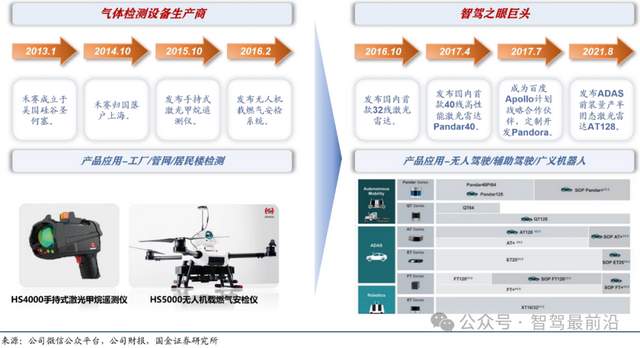
2016年起,禾赛先后推出了Pandar40/40P/64产品线,每代产品都获得了市场的高度认可。2018年,全球激光雷达市场进入白热化竞争,国内外数十家激光雷达供应商发布了各种形态的新一代激光雷达,128线/准固态/混合固态/数字雷达等新概念层出不穷。一时间雾里看花,大家不知如何选择,甚至有些公司专门成立了“激光雷达评测部”,把市面上主流的竞品统统买来装在一台车上对比。
尘埃落定,最终市场往往“用订单投票”。在中国,顶级玩家如百度、滴滴、小马、文远、图森和AutoX等都在其主流车队中选择了禾赛Pandar40P/Pandar64。在美国,根据加州DMV发布的2019年所有自动驾驶Rotobaxi公司路测数据,总里程数排名前15名的Rotobaxi公司中,禾赛产品独占鳌头,被10家以上公司作为激光雷达主雷达的首选。
2019年1月,第一批Pandar160抵达德国,接受最严苛的汽车传感器性能测试,测试完毕的结果显示禾赛承诺的所有技术指标都满足了要求。一向谨慎严格的德国合作伙伴也真诚祝贺我们,三个月实现了他们眼中的不可能,真是令人惊叹的“中国速度”。我们回答,这不仅是“中国速度”,更是禾赛价值观中重要的一点——Don’t overpromise, but overdeliver.
禾赛秘密研发Pandar160成功的消息不胫而走,很多已上量Pandar40P/Pandar64的客户都希望能全线升级到Pandar160,此时市场认为国内外厂商发布的128线有各种技术上的硬伤难以上量使用。理论上,禾赛如果把Pandar160推向市场,一定可以迅速风靡。
“不行,Pandar160不适合产品化,它不够优雅。”CTO给跃跃欲试的销售团队泼了一盆冷水。“Pandar160是市面上性能最好的激光雷达,但开发周期太紧张,本质还是上一代技术的暴力堆叠,而没有来得及注入我们储备的新一代技术。这样的产品即使短时间内可以领先市场,但最终给客户带来的是更糟糕的体验。你看市面很多中低端手机都用了4800万像素的摄像头,而最新的iPhone用的却还是1200万像素,因为它足够稳定而可以提供更优的体验。 ‘线数’这种显性指标能够体现其价值的必要前提是基于一个稳定可靠的产品,而这部分是隐性的。盲目追求显性的技术指标,而不去关注产品的成熟度和可靠性,赢取的是短期的订单,失去的是长期的用户体验和产品口碑。我们应该坚持做正确的事情,而不是容易的事情。Do the right thing。”
至此,Pandar160完成历史使命,禾赛也顶住了“订单诱惑”,回归自己的节奏。我们将积累的技术延续,准备做一款真正可量产的产品---Pandar128。打散重来,这一次Pandar128跟随禾赛自己的目标,设计之初目标就非常明确,全力打造一款满足自动驾驶主雷达功能痛点,并达到车规和量产要求的旗舰激光雷达,成为自动驾驶激光雷达的终极“机皇”。鉴于这样的期望,Pandar128研发注定要经历漫长的开发和验证流程,我们把发布日期锁定在了18个月后,也就是2020年的Q3。
开发Pandar128过程中,我们花了大量的时间访谈客户和市场调研,为什么客户在竞争对手128线和禾赛64线中绝大多数选择了64线?结论很有意思——仅增加垂直分辨率并不能最大化提高有效感知距离。从64到128线提高了垂直分辨率,但如果水平分辨率不相应提高,就成了感知瓶颈。换言之,垂直和水平分辨率要匹配,才能达到最好效果。比如行人检测,因为人是细长型的,如果水平分辨率保持不变,点云可能扫描不到人的完整身形,导致错过或者误判行人。
通常激光雷达转速或刷新率越低,越容易“取巧”地达到更高的单帧画面分辨率。而点频通常不随着转速或者刷新率的变化而变化,它综合反映了雷达单位时间输出的信息量。同时,点频和激光发射的功耗成正比。在同样激光雷达体积和发热量情况下,要想点频高,必须要采用更先进的技术提高光电效率,控制功耗。
“点频”这个指标就像是一个防伪验钞机,可以识别出很多片面的激光雷达宣传描述中的蹊跷。因此它是相对公平全面的参考标准,既不会被转速左右,更需要从系统层级全面提高激光雷达的发射、接收和信号处理能力。用“点频”和“测距”作为判断依据,我们做把市面上部分主流激光雷达的公开信息做了一个对比,发现很多有意思的现象:
纵观市场,Pandar128是目前市场上可买到的唯一一款10Hz对应水平角分辨率做到0.1°的360度环视激光雷达。也是唯一一款单回波最大点频超过3.4M点/秒的360度环视激光雷达,超过第二名40%之多。
相比Pandar64,Pandar128要实现双倍线数,三倍点频。因此相应把体积做大一倍以上似乎是一件想当然的事情,不仅友商如此,甚至包括禾赛Pandar160也是一个“巨无霸”。这个时候,CTO又冒出一个“so crazy it just might work”的想法:能不能通过我们新一代的底层激光收发技术,在实现所有技术指标的同时,体积基本保持不变呢?所有人都觉得他疯了。但禾赛的传统是,当 CTO问能不能的时候,他心里已经有了明确答案,能。
无独有偶,2019年底,另外一家已经大批量选用Pandar64的国际OEM客户,抱着试一试的心态问我们有没有可能在保持体积不变情况下大幅提升Pandar系列的性能和车规可靠性。当对方得知这正是我们秘密研发的Pandar128的设计方向时,对禾赛研发力和产品力赞不绝口。对于车规级量产项目而言,如果新一代传感器的外型可以保持不变,意味着绝大多数已定型的模具就可以通用,这会大幅减少验证周期和成本,让升级传感器变成了可能。正是由于我们在Pandar128设计之初保持优雅的初心,让禾赛和主流客户的需求不谋而合。
在已有技术的基础上,禾赛进一步升级了主动抗干扰技术,保证Pandar128发出的每一束激光都有自己的“密钥”,每台雷达都能识别并且只接收自己发出的光,即使在被其他激光雷达直射的情况下也能有效避免干扰。”
对于一款面向车规量产的产品,比性能更为重要的是其可靠性和功能安全。立项之初,Pandar128的定位就是一款超高可靠性的雷达,其核心零部件均采用车规器件(满足AEC-Q等相关标准),DV测试按照国际OEM标准覆盖电气、机械、气候、密封、材料、电磁兼容等50多项车规级别测试。
任何设备都存在发生失效的可能,对于涉及人身安全的汽车行业而言,当传感器发生失效时,是否能及时检测出自己的故障,就变得至关重要。
作为激光雷达核心部件,激光发射和接收单元由上千个器件组成,失效模式几十种。以激光雷达发射单元为例,激光器的开路会造成某一线没有有效回波数据,其点云表现同激光发射到无限远在“数据”上是一样的。但实际对于用户来说“截然不同”,错误信息会直接导致物体的错误识别,进而有引发风险事故的可能。禾赛依照不同的器件失效特征曲线,独创了一系列主动故障检测技术,能够确保每一线激光雷达点云的置信度。当发生失效时,雷达会在100ms内将“故障信息”传递给客户。
为了在量产交付的产品上实现ASIL-B等级的功能安全(设计已经完成,预计2021年Q3完成ISO26262全部认证),Pandar128功能安全方案涵盖了光机电软各子系统详尽的FMEA/FTA分析,考虑到了数千条不同的失效模式和应对策略,创新性地解决了激光雷达上“信号干扰”、“环境影响”等若干个行业悬而未决的技术难题,真正实现了故障诊断“高诊断覆盖率”、“低误报风险”。
测近精度。Pandar128对0.3-2m范围的超近距离物体测量精度比上一代旗舰产品优化3倍,远超传统长距激光雷达。作为一款以远距离为主打优势的激光雷达,却几乎达到市面上最好的补盲激光雷达的测近精度。提高测近精度对降低近距离盲区带来的风险具有重要意义,能有效避免主雷达在近距离测距不准确引起的系统误判。
网络安全。如何让雷达网络系统的硬件、软件及其系统中的数据受到保护,保证系统连续可靠运行,不因偶然或者恶意的原因遭受到破坏、更改、泄露,保证网络服务不中断,同时防止黑客破击,防护网络攻击等等,这是很多量产客户重视的指标。鉴于汽车行业还没有形成完善的网络安全标准,禾赛与国际OEM、第三方机构多轮讨论确定了一套框架,最终成功把一整套完备的网络安全系统应用在了Pandar128上,成为激光雷达行业内首批实现网络安全的产品。
自2016年以来,禾赛致力于开发“无人车的眼睛”,获得了自动驾驶、干线物流、低速物流、高精度地图、机器人和工业自动化,智慧城市和安防等各个领域客户的一致认可,并在技术难度最大的自动驾驶激光雷达市场占领了超过50%的市场份额,同时远销国际市场,60%的产品出口欧美。
禾赛产品线包括:面向自动驾驶的Pandar64/128系列,面向OEM的PandarGT系列,面向低速应用和盲区感知的PandarQT系列。未来,禾赛将用更广的产品线和更有竞争力的价格,推出更多、更智能、更低成本的激光雷达,为自动驾驶、智慧城市、车路协同和机器人行业持续赋能。
fqj
-
激光
+关注
关注
21文章
3706浏览量
69819 -
雷达
+关注
关注
52文章
3385浏览量
124500
发布评论请先 登录
英伟达选定禾赛为激光雷达合作方 发力L4级自动驾驶
从手工到自动:焊球剪切测试的技术演进与科学原理
不同等级的自动驾驶技术要求上有何不同?
禾赛科技再获美国Motional激光雷达订单
想实现自动驾驶,哪些技术非常关键?
低速自动驾驶与乘用车自动驾驶在技术要求上有何不同?

卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

浅析4D-bev标注技术在自动驾驶领域的重要性
轮边驱动电机专利技术发展
自动驾驶技术测试有哪些?

一文聊聊禾赛科技激光雷达技术
《汽车驾驶自动化分级》会更适合中国自动驾驶发展吗?

韩国自动驾驶技术交流团到访光庭信息
华为受邀出席第一届自动驾驶产业发展论坛
自动驾驶经历了哪些技术拐点?




评论