 使用知识图谱作为输入的表征,研究一个端到端的graph-to-text生成系统
使用知识图谱作为输入的表征,研究一个端到端的graph-to-text生成系统

背景
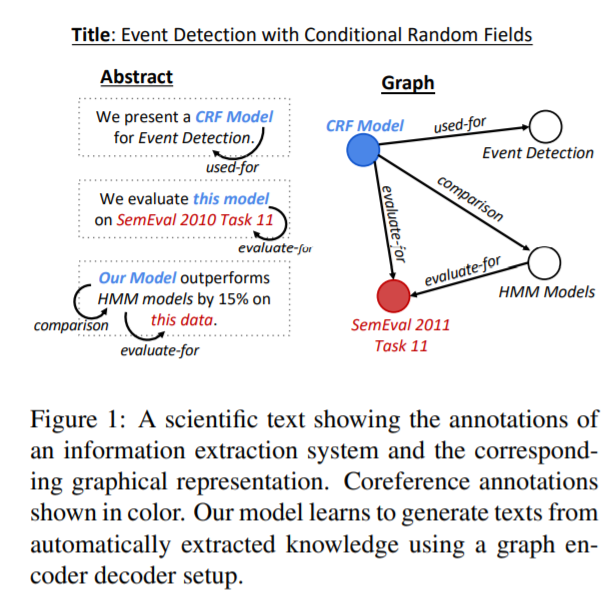
生成表达复杂含义的多句文本需要结构化的表征作为输入,本文使用知识图谱作为输入的表征,研究一个端到端的graph-to-text生成系统,并将其应用到科技类文本写作领域。作者使用一个科技类文章数据集的摘要部分,使用一个IE来为每个摘要提取信息,再将其重构成知识图谱的形式。作者通过实验表明,将IE抽取到知识用图来表示会比直接使用实体有更好的生成效果。
graph-to-text的一个重要任务是从 Abstract Meaning Representation (AMR) graph生成内容,其中图的编码方法主要有graph convolution encoder,graph attention encoder,graph LSTM,本文的模型是graph attention encoder的一个延伸。
数据集
作者构建了一个Abstract GENeration Dataset(AGENDA),该数据包含40k个AI会议的论文标题和摘要。对于数据集中的每篇摘要,首先使用SciIE来获取摘要中的命名实体及实体之间的关系(Compare, Used-for, Feature-of, Hyponymof,Evaluate-for, and Conjunction),随后将得到的这些组织成无连接带标签图的形式。
模型
GraphWriter模型总览

构建图
将之前数据集中的无连接带标签图,转化为有连接无标签图,具体做法为:原图中的每个表示关系的边用两个节点替代,一个表示正向的关系,一个表示反向的关系;增加一个与所有实体节点连接全局向量节点,该向量将会被用来作为解码器的初始输入。下图中表示实体节点,表示关系,表示全局向量节点

最终得到的有连接,无标签图为G=(V,E),其中V表示实体/关系/全局向量节点,E表示连接矩阵(注意这里的G和V区别上述图中的G和v)。
Graph Transformer

Graph Transformer由L个Block Network叠加构成,在每个Block内,节点的嵌入首先送入Graph Attention模块。这里使用多头自注意力机制,每个节点表征通过与其连接的节点使用注意力,来得到上下文相关的表征。得到的表征随后再送入正则化层和一个两层的前馈神经网络层。最后一层的得到的即表示上下文后的实体,关系,全局向量节点。

解码器
在每个时间步t使用隐藏状态来计算图和标题的上下文向量和,其中通过使用多头注意力得到,

也通过类似的方式得到,最终的上下文向量是两者的叠加。随后使用类似pointer-network的方法来生成一个新词或复制一个词,


实验
实验包含自动和人工评估,在自动评估中,GraphWriter代表本篇文章的模型,GAT中将Graph Transformer encoder使用一个Graph Attention Network替换,Entity Writer仅使用到了实体和标题没有图的关系信息,Rewriter仅仅使用了文章的标题,

从上图可以看到,使用标题,实体,关系的模型(GraphWriter和GAT)的表现要显著好于使用更少信息的模型。在人工评估中,使用Best-Worst Scaling,

-
数据集
+关注
关注
4文章
1240浏览量
26261 -
Transformer
+关注
关注
0文章
156浏览量
6961 -
知识图谱
+关注
关注
2文章
132浏览量
8350
原文标题:【论文解读】基于图Transformer从知识图谱中生成文本
文章出处:【微信号:zenRRan,微信公众号:深度学习自然语言处理】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为什么一段式端到端自动驾驶很难落地?


如何训练好自动驾驶端到端模型?


一文读懂特斯拉自动驾驶FSD从辅助到端到端的演进


黑芝麻智能端到端全栈式辅助驾驶系统的应用场景
端到端发展趋势下,云算力如何赋能智能驾驶技术跃迁?

自主工具链助力端到端组合辅助驾驶算法验证


为什么自动驾驶端到端大模型有黑盒特性?

为何端到端成为各车企智驾布局的首要选择?




评论