 移动机器人为什么要进行校零,工作过程分析
移动机器人为什么要进行校零,工作过程分析

最近在校正C2机器人时遇到了一个小事故,机器人的EMT坏了,反复校正零点报校正超时。
今天我们就聊聊C2机器人的校零。
为什么要校零?
1.当机器人校正的时候,各个轴就可以运动到一个特定的机械位置,也就时所谓的机械零点。
2.一旦机器人运动到机械零点,各个轴上的绝对编码盘的值就被保存下来了。
机器人零位校正后,可以用直角坐标系移动机器人或运行程序; 同时机器人也知道软限位的位置。
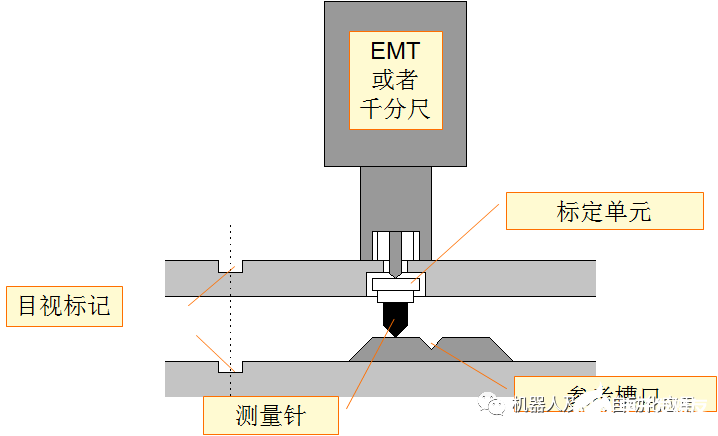
校零装置:
1.EMT
2.千分表
控制运行过程示意:
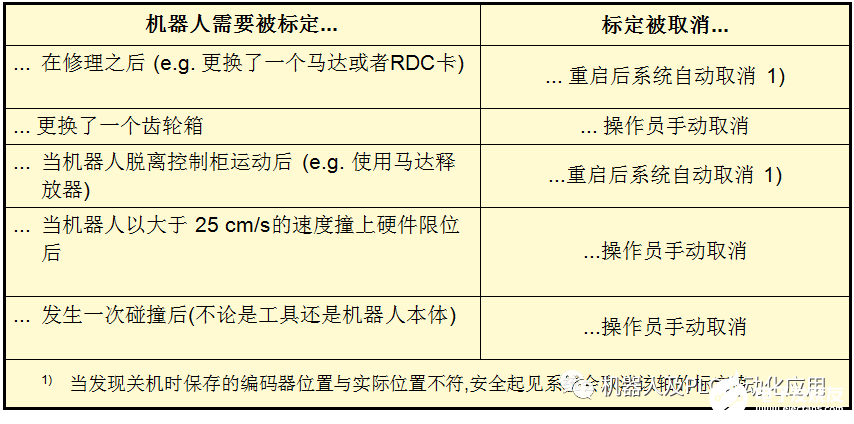
重新标定的情况:

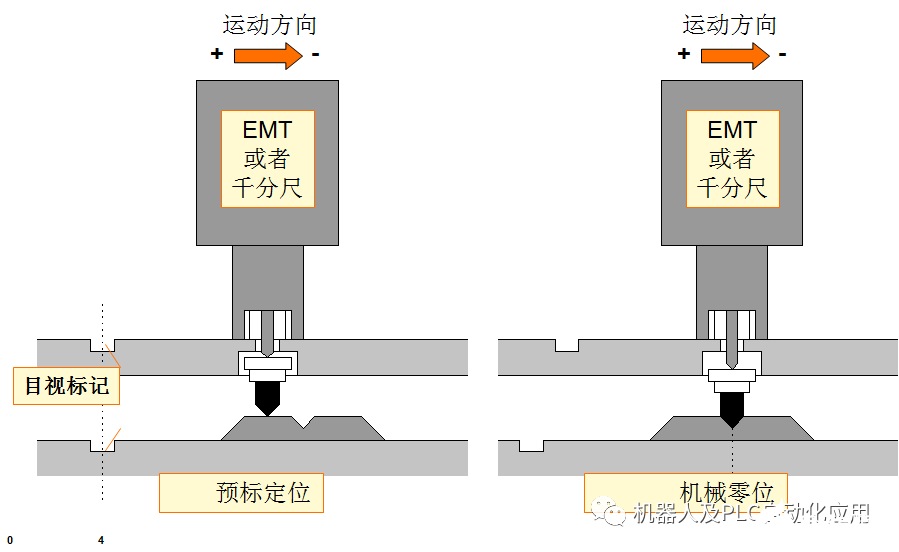
使用EMT标定:
•把需要标定的轴移动到预标定位 (如图所示白线位置)
•使用轴坐标系移动机器人各轴
•每个轴的标定是独立的

•从1轴开始往上标定
•每个轴总是从正向往负向运动
•仅仅在T1模式下!

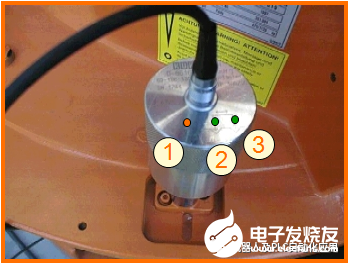
•摘掉标定单元的保护盖
•接上EMT 并连上信号线(另一端连接到 机器人底座上的连接盒接口 X32上)

•EMT上有三个指示灯:
1. 红色 - 错误
2.绿色 - 下降沿
3. 绿色 - 上升沿
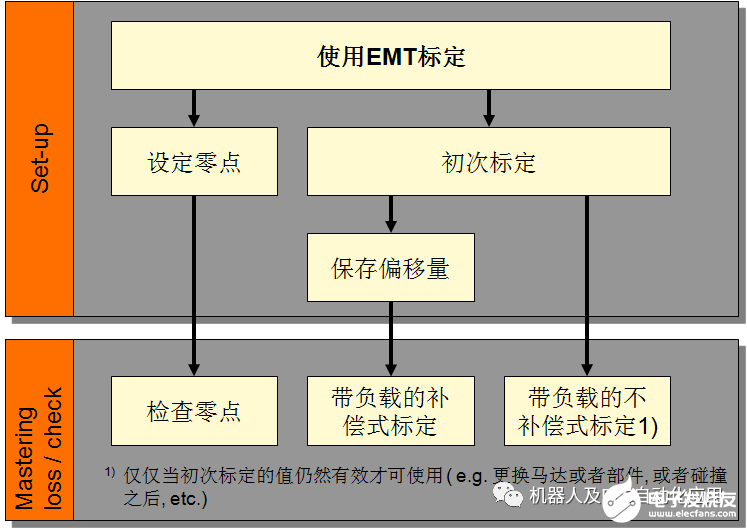
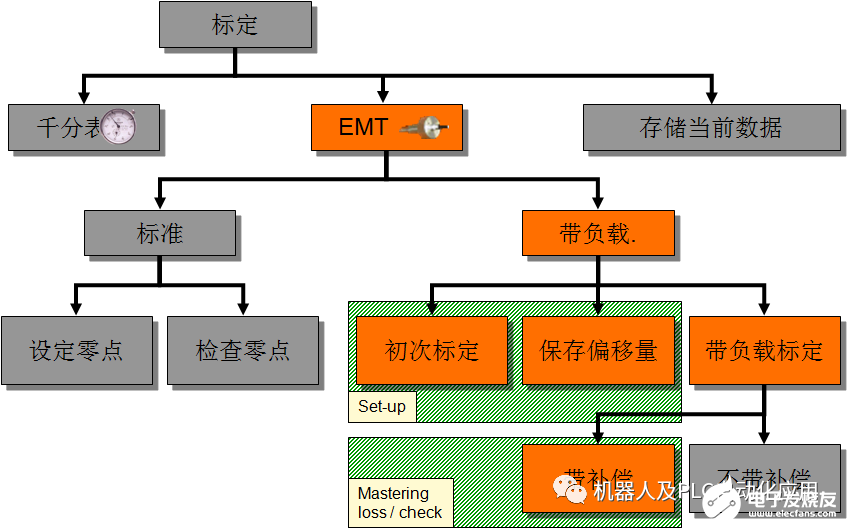
标定菜单:
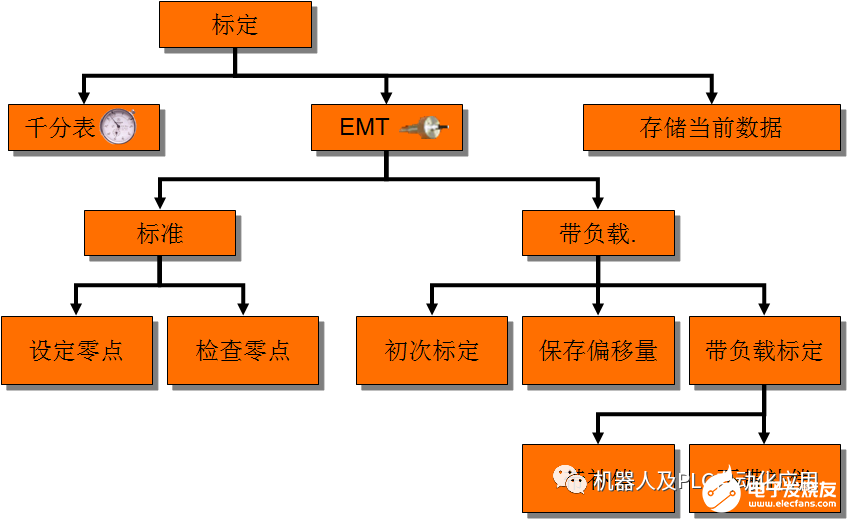
对于精确定位机器人的标定:
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31700浏览量
224683 -
编码
+关注
关注
6文章
1044浏览量
57228 -
校正
+关注
关注
0文章
48浏览量
14537
发布评论请先 登录
相关推荐
热点推荐
大象机器人正式发布myAGV Plus新一代移动机器人平台
恰逢教育部等五部门联合发布《“人工智能+教育”行动计划》,推动人工智能人才培养体系全学段重构的关键节点,大象机器人正式发布myAGV Plus——面向教学实验、科研开发、算法验证、智能巡检及机器人竞赛等场景的新一代移动机器人平台
电压放大器在四足压电移动机器人运动输出特性实验中的应用
致动的四足压电移动机器人的运动输出特性,探究激励电压、频率、斜坡信号对称度、工作表面等因素对其运动的影响,进而确定该机器人的最优工作频率、工作

探索 NXP MR - CANHUBK344 评估板:为移动机器人应用赋能
探索 NXP MR - CANHUBK344 评估板:为移动机器人应用赋能 在电子工程的世界里,不断有新的硬件产品涌现,为我们的设计带来更多的可能性。今天,我要和大家深入探讨一款专为移动机器人
MR-VMU-RT1176快速上手:开启移动机器人车辆管理单元设计之旅
MR-VMU-RT1176快速上手:开启移动机器人车辆管理单元设计之旅 在移动机器人领域,车辆管理单元(VMU)的性能至关重要。今天要给大家介绍的是 NXP 的 MR-VMU-RT1176,一款
MR-BMS771参考设计:适用于移动机器人的电池管理系统
MR-BMS771参考设计:适用于移动机器人的电池管理系统 一、引言 在移动机器人领域,可靠的电池管理系统(BMS)至关重要。NXP的MR - BMS771参考设计为工程师提供了一个出色的解决方案
Infineon移动机器人电机控制方案深度解析
Infineon移动机器人电机控制方案深度解析 在当今科技飞速发展的时代,移动机器人在物流、生产、服务等众多领域的应用日益广泛。电机控制作为移动机器人的核心技术之一,其性能直接影响着机器人
Infineon DEMO_IMR_BMSPWR_V1:移动机器人电池管理系统的卓越之选
Infineon DEMO_IMR_BMSPWR_V1:移动机器人电池管理系统的卓越之选 在当今科技飞速发展的时代,移动机器人在物流、仓储、医疗等众多领域发挥着越来越重要的作用。而电池管理系统
Infineon DEMO_IMR_BMSCTRL_V1:助力移动机器人电池管理的创新方案
Infineon DEMO_IMR_BMSCTRL_V1:助力移动机器人电池管理的创新方案 在当今科技飞速发展的时代,移动机器人在各个领域的应用越来越广泛,从物流仓储到医疗服务,它们的身影无处不在
中科创达旗下晓悟智能斩获十年荣耀移动机器人工程应用典范奖
2025 年 12 月 3 日,移动机器人产业联盟主办的 “2025(第八届)移动机器人行业发展年会” 盛大召开。会上,晓悟智能凭借新一代无人叉车 + 融合调度平台的技术突破与工程应用成果,成功斩获
移动机器人“芯”引擎爆发,禾赛、海思新品逆袭
GGII预计,2025年中国移动机器人销量有望达到12.6万台,总量同比增长约12.7%。这也催生了对上游激光雷达的需求。本文将重点介绍智能物流体系中移动机器人的雷达性能要求和新品。

安森美产品如何助力打造下一代自主移动机器人
类员工严格隔离的。不过,细心的小伙伴会发现,随着新一代自主移动机器人(AMR)的出现,机器人在人们心目中的刻板形象正在被打破,它们正在被赋予新的含义,并开始真正走入我们的生活。
移动机器人技术的发展历程
本白皮书聚焦于移动机器人领域的进展与挑战,重点探讨三个核心主题:机器人运动控制、复杂环境中的感知与导航,以及在适应新任务时的模块化与灵活性。此外,文中还重点介绍了机器人系统从简单的固定机械臂到复杂人形
恩智浦自主移动机器人设计要点
长期以来,自动化机器人一直被视为科幻小说中的概念,而如今这一技术已成为现实,并正在大规模部署。在机器人技术领域,自主移动机器人 (AMR) 是发展最快的创新技术之一。

瑞芯微 RK3568/3588:为移动机器人注入智慧动力引擎
; 商用服务机器人: 如配送、清洁、导览机器人,活跃于酒店、餐厅、商场、医院,提供便捷服务; 特种移动机器人: 如安防巡检、农业作业、灾难救援机器人,在复杂或危险环境中替代人
轮式移动机器人电机驱动系统的研究与开发
【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间模型进行
发表于 06-11 14:30



评论