 Hibot机器人手臂Float Arm可用于哪些应用环境
Hibot机器人手臂Float Arm可用于哪些应用环境

Hibot宣布,已通过第三方向Takahata Precision分配新资本,与东京电力科技公司签订资本和业务协议。
通过资本业务合作,Hibot将致力于在东京电力技术公司维护每个电力设施(如火力发电站、核电站、可再生能源厂)中使用机器人引入基础设施检查服务。此外,Takahata的新型3D光学传感器安装在Hibot新型蛇形操纵器“ Float Arm”的顶端。因此,可以通过高速获取高精度的三维数据来进行更详细的分析。此外,通过利用Takahata的网络,Hibot将不仅在日本而且在全球范围内全面扩展其RaaS(机器人服务)业务。
能代替“脏乱、危险、严重”的工作的机器人手臂“Float Arm”
Hibot是一家机器人公司,成立于2004年,最初是由东京工业大学成立的。旨在通过机器人代替,使人们摆脱“肮脏”,“危险”和“严密”等极端环境的工作,他们正在创造全球基础设施发展的新趋势。
该公司的新型蛇型机械手“浮臂”(Float Arm)是一种全长5米的机器人,专为在狭窄空间中进行远程作业而开发。重量是25kg。通过独特的运动控制技术,可实现细长而灵活的动作,例如蛇形即使在狭窄且视野不佳的环境下,也可以进行高精度的检查和设备数据采集。通过与AI数据平台“ HiBox”链接,AI可以应用于机器人收集的大数据,并且可以预测故障,缺陷和缺陷的可能性。另外,它可以轻松地与基础设施内运行的系统进行整合,可以应对各种应用环境。
规格
・全长:5m
・重量:25kg
・有效载荷:1.5kg
・链接数:8
・可搭载传感器:HD相机、热摄像机、UT探测、LiDAR
通过灵活运用“Float Arm”,不仅可以减少以往为了检查而设置脚手架的时间,还可以从危险环境中的检查作业中解放劳动力。公司已经开始与大型OEM制造商、飞机、石油、天然气、化工厂行业的全球服务提供商合作。
“Float Arm”的应用场景:(左)飞机检查、化工厂检查和数字孪生(右)
AI数据平台“HiBox”是一个AI数据平台,该AI数据平台将检修机器人上搭载的高分辨率照相机和超声波探测等各种传感器捕捉到的检修数据进行累积和分析。通过使用累积的数据创建要检查的基础设施的数字孪生并将AI应用于机器人收集的数据,可以预测故障,缺陷和缺陷的可能性。也可以通过云端使用传输数据远程确认检查结果。
通过使用“HiBox”,不仅可以缩短伴随检查时间的工作的基础设施停止期间,还可以减少详细的测量数据的追加检查作业,实现检查所需成本的大幅削减和安全高效的基础设施整备、维护管理。已经和发电站、飞机、石油、天然气、化工厂等多家全球服务提供商共同致力于试验性引进检修机器人和“HiBox”。
引进各个电力设施,构筑全球供应链
东京电力技术公司是负责发电设备维护管理的东京电力控股集团公司。通过这次的资本业务合作,Hibot将在东京电力技术进行维护火力发电站、核电站、再能源设备等电力设施,一起致力于引进使用机器人检查基础设施的服务。此外,将两者的知识和技术相融合,致力于基础设施检查的劳动力简化、数字化和高度化,也将应对发电站和设备检查方面的世界需求。他们还将利用Takahata的网络建立全球供应链,该网络在亚洲,美国和欧洲拥有14个基地。
责任编辑:gt
-
机器人
+关注
关注
214文章
31659浏览量
224574 -
大数据
+关注
关注
64文章
9115浏览量
144178
发布评论请先 登录
人形机器人关节扭矩传感器的详细应用场景及解决方案

人形机器人手部模块硬件解析与静电浪涌防护方案

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
为何你的机器人手臂“知觉”存在偏差?探秘力传感器的奥秘
注意!注意!Profinet转devicenet与Fanuc机器手臂连接易忽略的小细节

【案例分享】电子谷定制通讯线束:人形机器人稳定律动连接方案

探索RISC-V在机器人领域的潜力
自制巡线解迷宫机器人(上)
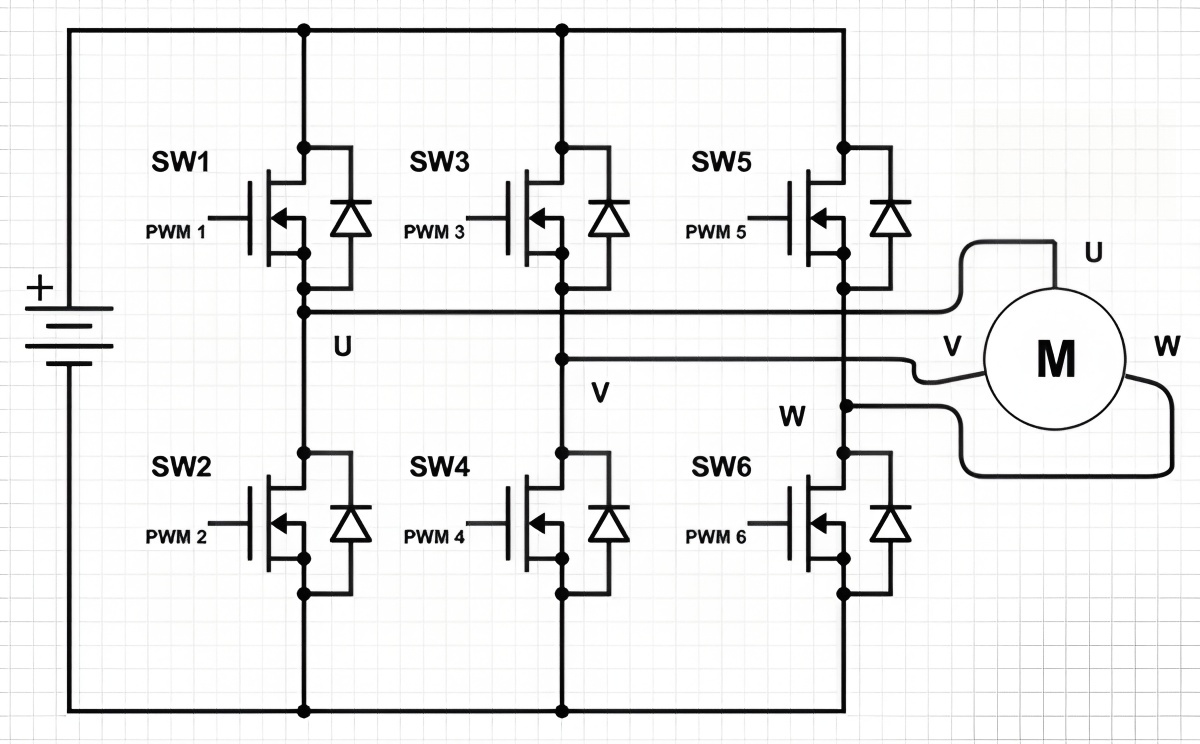
用于机器人手臂的基于B3M010C075Z和BTD5452R的三相全桥电机驱动器设计报告
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
生产线不停摆的“隐形卫士”:优比施UPS电源,精准守护机器人手臂零停机




评论