 dfrobot树莓派4B/3B+ IO扩展板简介
dfrobot树莓派4B/3B+ IO扩展板简介




简介
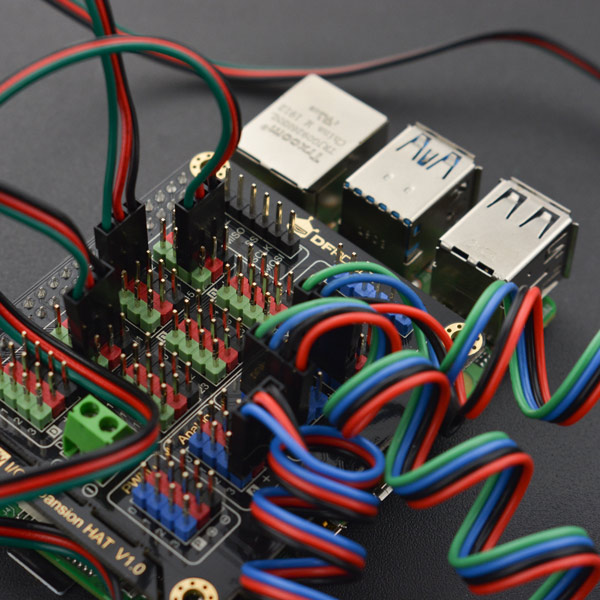
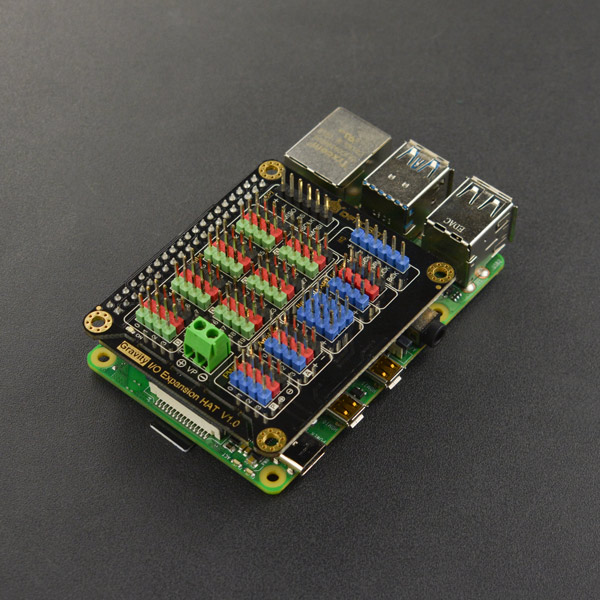
IO Expansion HAT是一款专为Raspberry Pi 开发的IO扩展板,扩展板将树莓派IO口均引出,包含数字端口、模拟端口、PWM端口、IIC端口、UART端口、SPI端口、IIS端口,完美兼容DFRobot的Gravity传感器系列产品,为使用树莓派省去繁琐的接线和故障排除,让学生、开发者、科研工作者可以专注实现自己的项目。
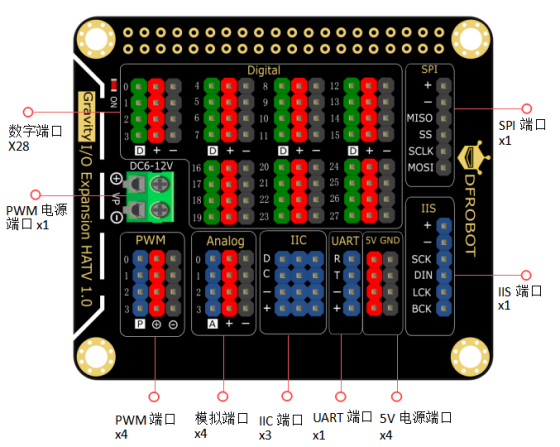
Raspberry Pi的GPIO电平最高为3.3V,该扩展板除了支持3.3V供电的传感器或功能模组外还支持更多产品的使用,以满足你的项目所需:
支持5V供电、3.3V电平的传感器或功能模组(将电源接到5V电源端口)
支持PWM外部供电(6~12V)
支持多路舵机控制

尺寸图
技术规格
工作电压:5V
PWM接口外接电压:6-12V
传感器接口电压:3.3V
尺寸:65*56 mm
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式主板
+关注
关注
7文章
6107浏览量
37168 -
DFRobot
+关注
关注
4文章
1165浏览量
12722
发布评论请先 登录
相关推荐
热点推荐
树莓派CM5高性能扩展板开源项目介绍
用树莓派 CM5 做嵌入式项目,却被扩展板坑到?要么接口单一,缺千兆网、高速存储,满足不了物联网 / 媒体中心需求;要么尺寸庞大,不适合空间受限的场景;要么供电效率低,高性能运行时不稳定;还有的缺传感器、散热支持,开发调试麻烦?

高性能电流模式PWM控制器UC2842B/3B/4B/5B和UC3842B/3B/4B/5B的全面解析
高性能电流模式PWM控制器UC2842B/3B/4B/5B和UC3842B/3B/
高性能电流模式PWM控制器UC2842B/3B/4B/5B - UC3842B/3B/4B/5B解析
高性能电流模式PWM控制器UC2842B/3B/4B/5B - UC3842B/3B/
高性能电流模式PWM控制器UC2842B/3B/4B/5B - UC3842B/3B/4B/5B详解
高性能电流模式PWM控制器UC2842B/3B/4B/5B - UC3842B/3B/
UC2842B/3B/4B/5B - UC3843B/3B/4B/5B高性能电流模式PWM控制器
UC2842B/3B/4B/5B - UC3843B/3B/
深度解析UC2842B/3B/4B/5B与UC3842B/3B/4B/5B高性能电流模式PWM控制器
深度解析UC2842B/3B/4B/5B与UC3842B/3B/
爱芯元智边缘AI芯片AX8850完成Qwen3-VL多模态大模型适配
已适配 Qwen3-VL-2B/4B/8B 到 AX8850 开发板和 M.2 算力卡,可在本地完成图片内容理解和视频概要生成,可配合“树莓派

Qwen3-VL 4B/8B全面适配,BM1684X成边缘最佳部署平台!
算能BM1684X上完成Qwen3-VL4B/8B模型的适配,推理速度13.7/7.2tokens/s,使其成为边缘部署多模态大模型的最佳选择。近日,阿里千问正式开源Qwen3-VL系列的4B

切记!使用树莓派时绝对不能做的7件事!
如今,树莓派几乎可用于任何场景。然而,这种多功能性有时会让你忘记,这款单板计算机并非坚不可摧,一个小失误就可能彻底损坏主板。我桌上有台树莓派4B

带增益的 RX 分集 FEM(B26、B8、B20、B1/4、B3 和 B7) skyworksinc
电子发烧友网为你提供()带增益的 RX 分集 FEM(B26、B8、B20、B1/4、B3 和
发表于 06-27 18:31

树莓派5 与 树莓派4:深度对比与独特优势!
和专业人士都好奇它与前代产品树莓派4相比表现如何。本文将深入对比这两款机型,突出它们的差异和独特优势,帮助您做出明智的决策。1.处理器树莓派
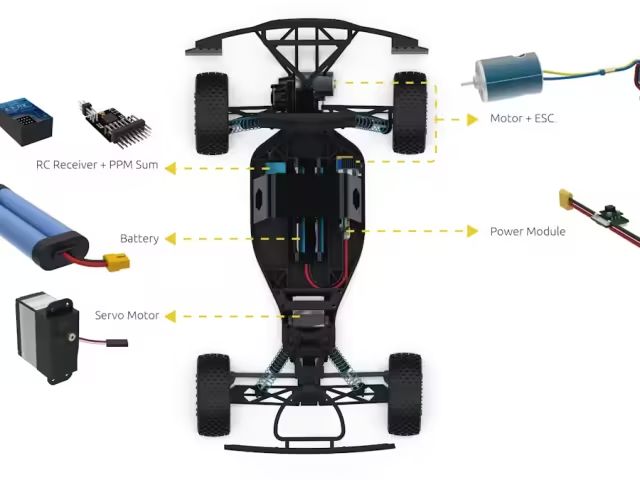
用 树莓派 Zero 打造的智能漫游车!
使用PXFMini和树莓派Zero打造您自己的自主漫游车。本项目所用组件硬件组件ErleRoboticsPXFmini×1树莓派Zero×1树莓



评论