 螺旋桨时钟DIY图解
螺旋桨时钟DIY图解

步骤1:8051
8051是40针微控制器IC,用于这个项目
我已经在通用电路上实现了PCB和其他连接直接拖动并与LED相连。这个项目建议我Anupam Dubey做这个惊人的项目。
第3步:电路图
此电路的电路图在Propeller Clock PDF文件中给出,请下载以获取原理图。
步骤4:PCB布局

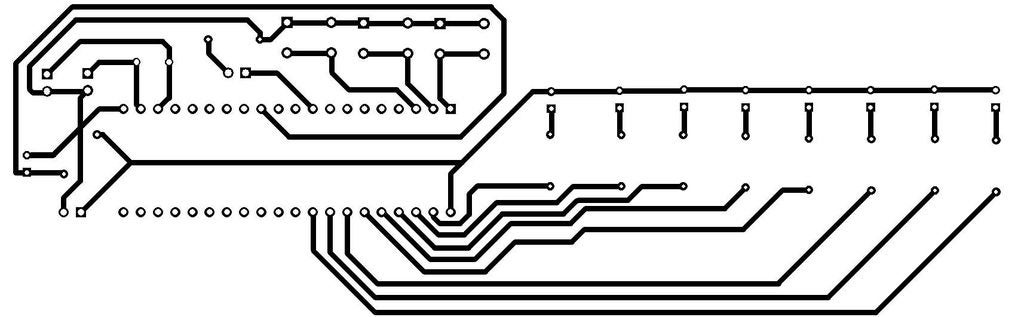
我已经在Dip Trace PCB Designer软件中进行了PCB布局。它给了我螺旋桨时钟的PCB布局,但是对于我的项目,我在通用PCB上制作电路,如果有人要在设计的PCB上制作它,我就将其上传到PCB上,然后可以很容易地从PCB设计中提取出来。而且此设计仅适用于8051
第5步:编程
此处提供了编程及其十六进制文件,因此您可以使用适当的ISP/直接烧写8051controller ic装载机。我曾经使用Keil Programmer进行编程,而我使用Flash Magic loader进行了烧录,因为您可以使用
mikroC PRO for 8051进行编程,其Flash刻录机也可以通过其设置文件获得。
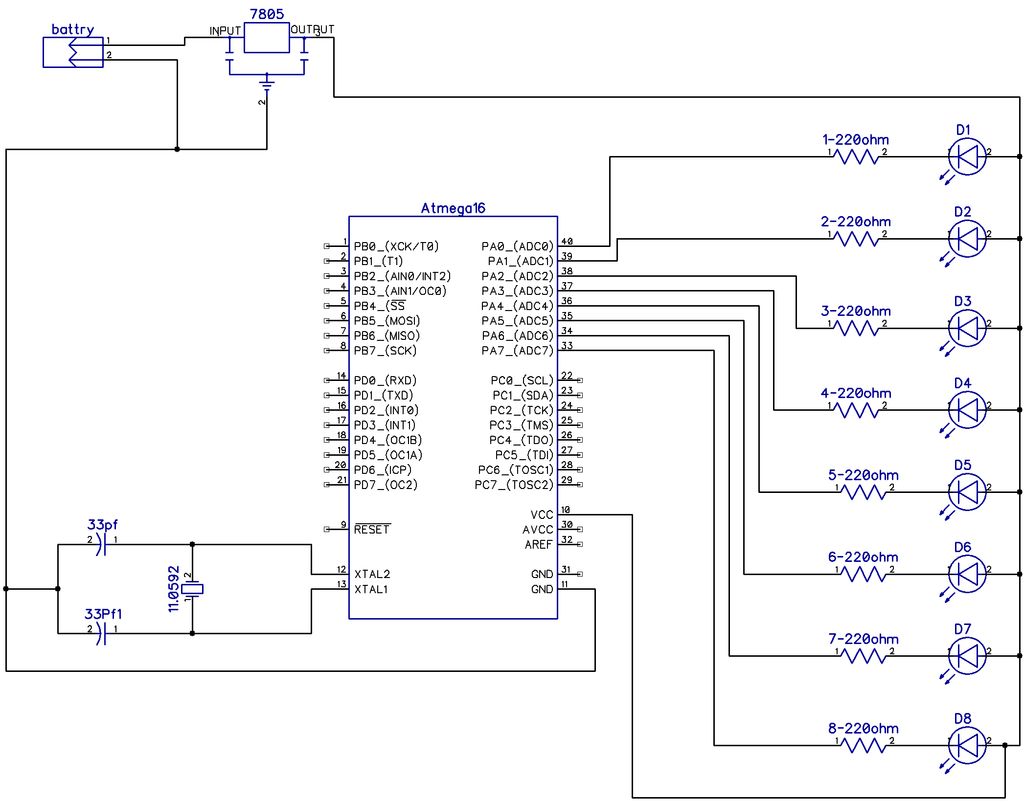
第6步:使用Atmega16进行POV螺旋桨按摩显示
现在我已经使用atmega16制作了新的POV螺旋桨显示,您还可以使用atmega8使其更便宜,更简单,更紧凑。
步骤7:电路和编码
第8步:完成按摩的方法

在POV按摩显示器中,通常可以建立两种类型的电路,一个是高电平有效,另一个是低电平有效。
我们知道这个概念,因此,高电平有效电路在逻辑为“ 1”时使LED点亮,而低电平有效电路在逻辑“ 0”时使LED点亮。被申请;被应用。因此,到目前为止,这里给出的概念图是为您自己的按摩制作自己的代码。
步骤9:所有活跃状态下所有单词的源代码
此源文件可在POV螺旋桨显示中提供任何名称的任何符号书写。
注意 :-
仅当您以高电平有效模式制作POV显示时,此代码才用于 ACTIVE HIGH 电路,然后只需将该代码覆盖所有单词和PDF中提供的任何符号即可。
-
8051
+关注
关注
3文章
311浏览量
53459 -
时钟
+关注
关注
11文章
2007浏览量
135434
发布评论请先 登录
技术资讯 I 帆船赛中的“隐形杀手”:通过网格技术精准捕捉空化

无人机动力测试怎么做?用到的设备有哪些?

【技术帖】硬核拆解!3D Hall 如何搭配 A+G 实现精准导航

从心脏到神经中枢:高性能战斗机飞发协同设计中的任务剖面分析与动态设计点匹配技术研究

机电热一体化:固旋翼垂直起降混电飞行器关键技术发展路径、现实挑战与适航认证展望


涡桨飞机变距调速器技术演进图谱研究:从机械液压自主到智能电液综合的范式变迁

CAD如何绘制螺旋线

智能变桨:基于DSP与CPLD协同处理的高动态飞行器主桨电动变桨距伺服控制系统

四轴无人机是如何工作的?

突破续航瓶颈:无人机混合动力系统高效高功重比电机与能量管理关键技术探析

定华雷达仪表学堂:如何选择雷达液位计?
格物优信高速显微热像仪在航空科研中的应用
从旋翼到eVTOL:解析民用无人机电动动力系统的技术演进与产业升级路径




评论