 基于arduino操作的机器人DIY图解
基于arduino操作的机器人DIY图解

步骤1:所需组件:-
1xArduino Uno R3
1xL293D电动机驱动器IC
1x机器人底盘
2x车轮
2x齿轮电动机
1x脚轮
1x移动电源或5v电池
1x 9v电池
1xBreadBoard
连接线
》双面泡沫胶带
步骤2:所有组件的链接
所有组件的链接
1。机箱
您可以在我们的指南的帮助下进行制作-如何制造便宜的家用机箱
或从此处购买-
高级金属底盘,
ELEMENTZ丙烯酸机器人底盘,带平台+ BO马达+车轮+夹钳-DIY(自己动手)套件
》结果,
,点击 2。齿轮电动机
BO电动机100 RPM(2 Pcs)+ BO轮(2 Pcs)+ BO电动机夹具螺钉(2个)
齿轮减速电机
3。 Arduino Uno R3
原创-Arduino UNO R3-(意大利制造)
更便宜-UNO R3开发板ATmega328P ATmega16U2带有用于Arduino的USB电缆
4.L293D电机驱动器IC
2件l293d ic
您可以从此处阅读有关L293d ic和Arduino uno的更多信息
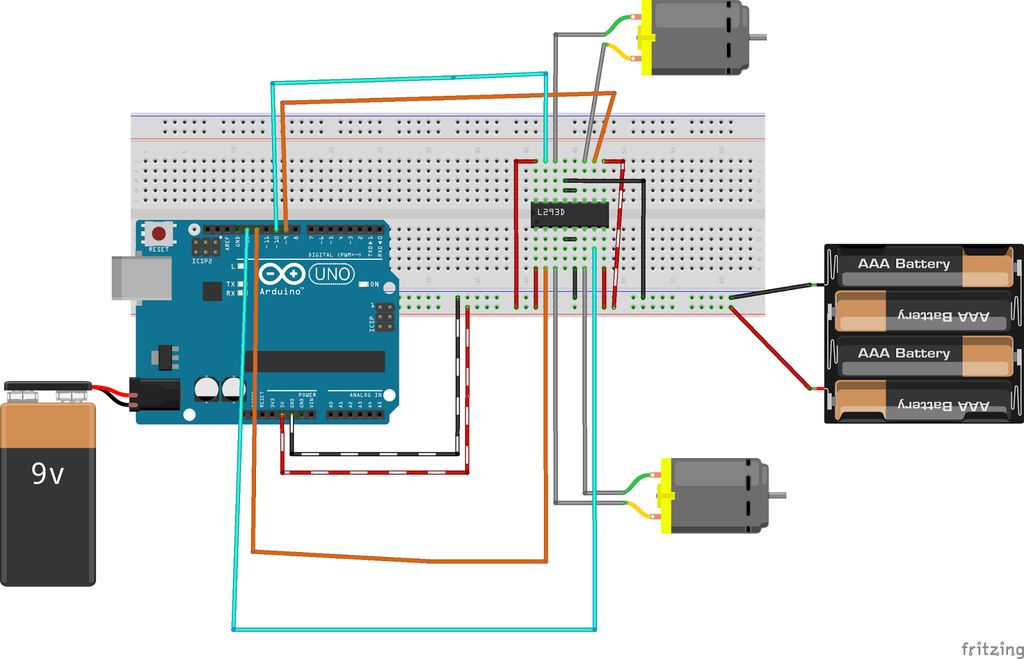
步骤3:电路图:-
步骤4:步骤:-
准备好机箱,并在双面胶带的帮助下找到将arduino,面包板和移动电源固定在机箱上的好地方。并安排一切。现在请按照以下步骤操作:-
✔L293d IC-电源
1.将引脚1,8、9和16连接在一起,然后将其连接到5v面包板。(红线)
2.连接引脚4,将5和12,13一起连接到面包板的地线。(黑线)
3.将第一个电动机连接到插针3和64。将第二个电动机连接到插针11和14。《5.5》 5.5-6 V
✔L293dIC-Arduino
1.L293D IC的引脚2连接到Arduino的引脚12。
2.L293D IC的引脚7连接到Arduino的引脚13。 。
3.L293D IC的引脚10连接到Arduino上的引脚9。4.L293DIC的引脚15连接到Arduino上的Pin10 *。“ 9伏电池为Arduino板供电”
步骤5:Arduino程序:-
由sk.ino
圈出,代码非常简单。您还可以更改和修改代码,然后尝试其他操作。您可以通过sk.ino文件下载附件中的圆圈,然后直接在Arduino IDE中打开。
要感谢编码,请访问-NIkheel94
-
机器人
+关注
关注
214文章
31656浏览量
224571 -
Arduino
+关注
关注
191文章
6535浏览量
197667
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
机器人用霍尔电流传感器,能提升操作安全性么?

探索RISC-V在机器人领域的潜力
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
自制巡线解迷宫机器人(上)
什么是机器人?追溯机器人技术的演变和未来

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
工业机器人与协作机器人概念不同




评论