 手套控制的机器人手的制作
手套控制的机器人手的制作

步骤1:购买零件
以下是我用于该项目的确切零件和链接的列表:
1 x Arduino Uno-$ 24.95
1 x Plastic Toy Hand-$ 10.99
5台小型伺服电机-$ 15.70
5台Flex传感器-$ 64.75
1 x手套-$ 4.00,戴上不会变形的任何手套/起飞会起作用。
1 x PCB Board-$ 4.95,任何有孔的小PCB在这里都可以使用。
同样,在本地的业余爱好商店取货可能会更便宜。
1 x面包板-$ 5.95,同上。
5 x 22k欧姆电阻-$ 1.49,与上同
1 x鱼线-$ 3.36,与上述相同。
本教程假定您已经可以使用一些基本的工具来构建项目,包括:
烙铁和焊料
连接线
热缩
胶带
拉链
Superglue
电钻
步骤2:制作手套和电路
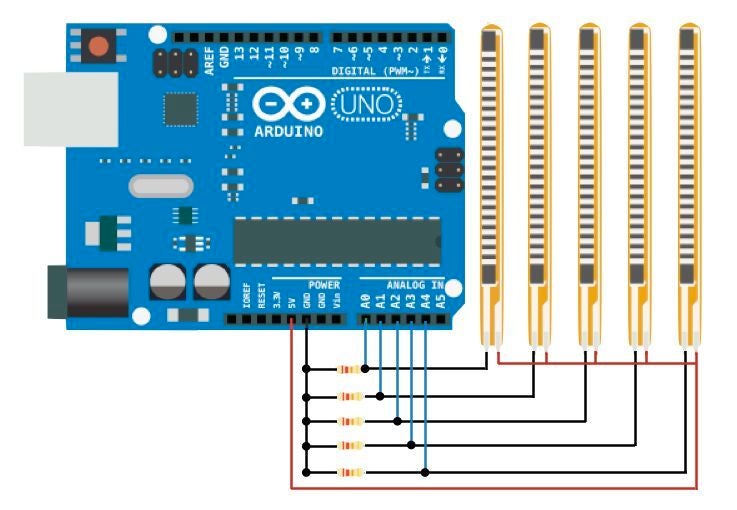
我将把大部分关于创建电路的教程重定向到此处的其他说明。这是一个非常简单的电路,传感器使用Arduino的5V电压运行,并且22k电阻接地。只需确保将地线,模拟线和电阻器线都焊接在电路板下方即可。我用电线将颜色进行协调并用电线将所有电线包裹起来,因为您会绕过很多电线。
您将需要学习如何缝制以将电路连接到手套上。我在木板的四个角缝到手腕顶部。您还需要在每个柔性传感器的顶部钻一个小孔,以便将其缝在指尖中。我还用手指缝制了另外三个位置的传感器。您越固定传感器,通过Arduino获得的值就越干净,但是缝制手套非常繁琐且耗时。我的建议是沿手指的三个指关节缝制,并称其为好。
步骤3:组装手
《到目前为止,这是该项目中最繁琐且耗时的步骤。在继续操作之前,请确保您有足够的钓鱼线,强力胶和松紧带。首先将灰色指尖粘合到每个黑色手指上。然后以上图所示的确切方式将每个电机上胶和拉紧。右上方和中间的马达都逆时针旋转,其余的则顺时针旋转。可以随意测试自己的安排,但是如果按照我的布局进行操作,就不会遇到任何问题。
一旦所有强力胶变硬,您就可以继续穿线钓鱼线了。首先,您需要将线连接到电机附件的最后一个孔。您需要确保打结后,再将其穿过手指时,才能承受很大的拉力。如果在穿过手指后结变得松散,则必须重新开始。一旦结得很重并且有大量多余的松弛线,则将其穿过电动机的相应指状部。在我的图片中,电机的连接方式是,左上通过第二个手指,左下通过第一个手指,中下通过第四个手指,右下通过第三个手指,右上通过第五个手指。穿线后,我无法创建一个结,该结可能会沿线滑入指尖。如果您知道该怎么做,那就去吧。但是,另一种解决方案是将线放下并在绑紧前将其多次缠绕在顶部指节上。当您系上手指时,您将要确保手指和马达之间存在一定的张力,因此可能需要尝试几次才能使其正确。一旦将所有五条线穿线并绑好,就恭喜!完成了项目中最困难的部分。
最后,您需要将一些电线插入伺服电机电线的母接头中。红色应连接到5V,棕色应接地,橙色应连接到数字输出引脚。我将所有5V导线和接地导线焊接在一起并进行热收缩,以便仅将一根用于电源和接地的导线连接到面包板上。
步骤4:完成电路
用5V线连接并在Arduino上接地到面包板。将伺服和传感器电路的电源和地线连接到面包板上相应的位置。现在,您需要将来自传感器的五条模拟线连接到Arduino上的模拟引脚A0至A4。我这样做是为了确保它们顺序正确(A0-拇指,A1-索引。..等等)。最后,将伺服信号线连接到Arduino上的数字引脚8至12。再次,我要确保它们顺序正确(8-拇指,9-索引。..等等)。这应该完成电路的布线。
最后,为Arduino写代码。代码非常简单,在附加文件中遵循我的逻辑,您应该不会有什么麻烦。我的代码是使电路运行的最低限度,请随意使用它来优化电路。
-
传感器
+关注
关注
2574文章
54456浏览量
786572 -
伺服电机
+关注
关注
88文章
2167浏览量
60894 -
Arduino
+关注
关注
190文章
6516浏览量
196048
发布评论请先 登录
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
荣耀官宣明年推出机器人手机 Robot Phone!手机+摄像机+机器人三合一
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
MT6701绝对式磁编码器优化机器人关节伺服控制

生产线不停摆的“隐形卫士”:优比施UPS电源,精准守护机器人手臂零停机

工业机器人的特点
汽车智造“破界”!PROFIBUS DP转ETHERNET/IP激活机器人手臂超能力
盘点#机器人开发平台
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
未来已来,2025人形机器人量产启航!泰科机器人成功斩获近千万订单






 工商网监
工商网监
评论