 绳索攀登机器人的制作
绳索攀登机器人的制作

第1步:灵感,原型和设计
建造一个爬绳机器人是我小时候的一个想法,灵感来自我童年最喜欢的一个节目:巫师。可能你从来没有听说过它。你看,在一个典型的“垃圾宝藏”的例子中,几个在美国不受欢迎的节目(并且仅在一个季节后被取消)成为拉丁美洲的邪教经典,完整世代将它们作为参考点。所以对于我们很多人来说,“街头鹰”,“Manimal”和“Automan”都像“The Fall Guy”,“The A-Team”和“MacGyver”一样酷。
人们说Tyrion Lannister是第一次将侏儒症的人视为电视剧中的主角(没有任何反对Peter Dinklage,他是我们这个时代最优秀的演员之一),但这归功于Simon McKay(David Rappaport)。他太棒了!机器人技术的天才曾经为政府制造武器,然后他退出并成为最好的玩具制造商,慈善家和冒险家。每当他和他的朋友遇到麻烦时,他的行李箱里都有一些特殊的玩具可以让他们逃脱。也许他的第一个给我留下深刻印象的玩具是他在工作室里的一个爬绳机器人。有好几次我试着制作像那样的玩具,但我失败了。但是在遇到这个3D笔问题后,我决定再次尝试这个想法。
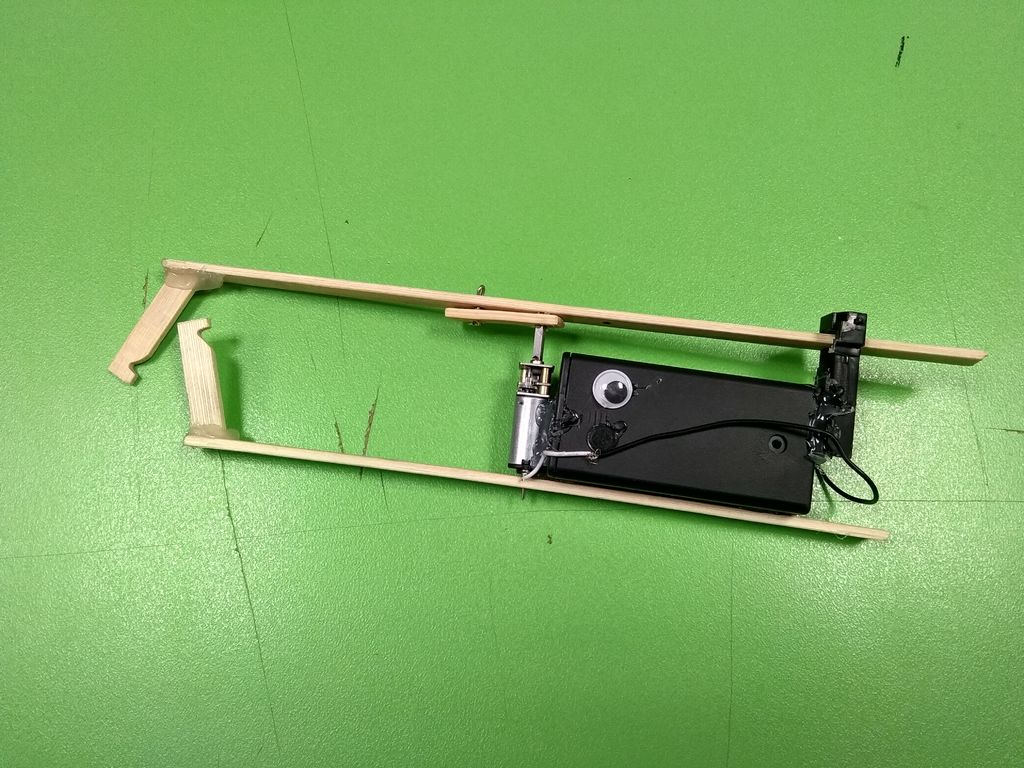
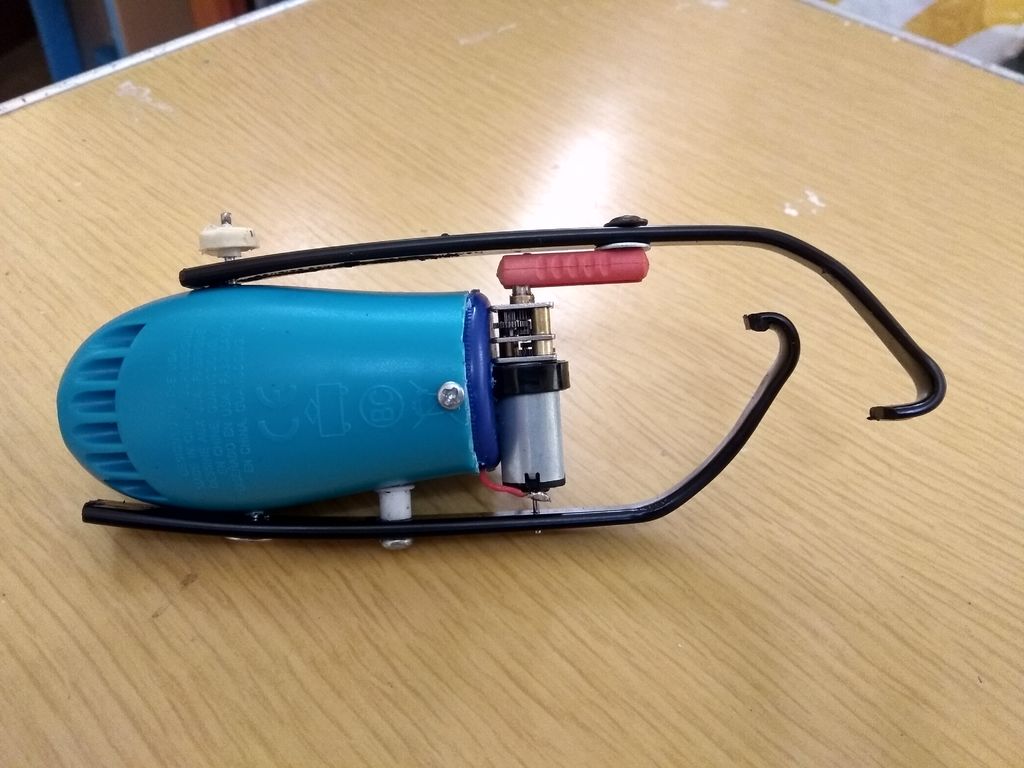
首先,我需要测试3D笔的变速箱是否足够强大以提升机器人的重量,所以我创造了使用电机,电池座和竹烤肉棒的原型,全部用热胶粘住。当我看到它工作时,我感到很惊讶!。..几分钟。在那之后,热胶不足以承受压力,原型缠结并倒在地上。但是在短时间内工作,它给了我建立一个更好的机器人的基本信息!
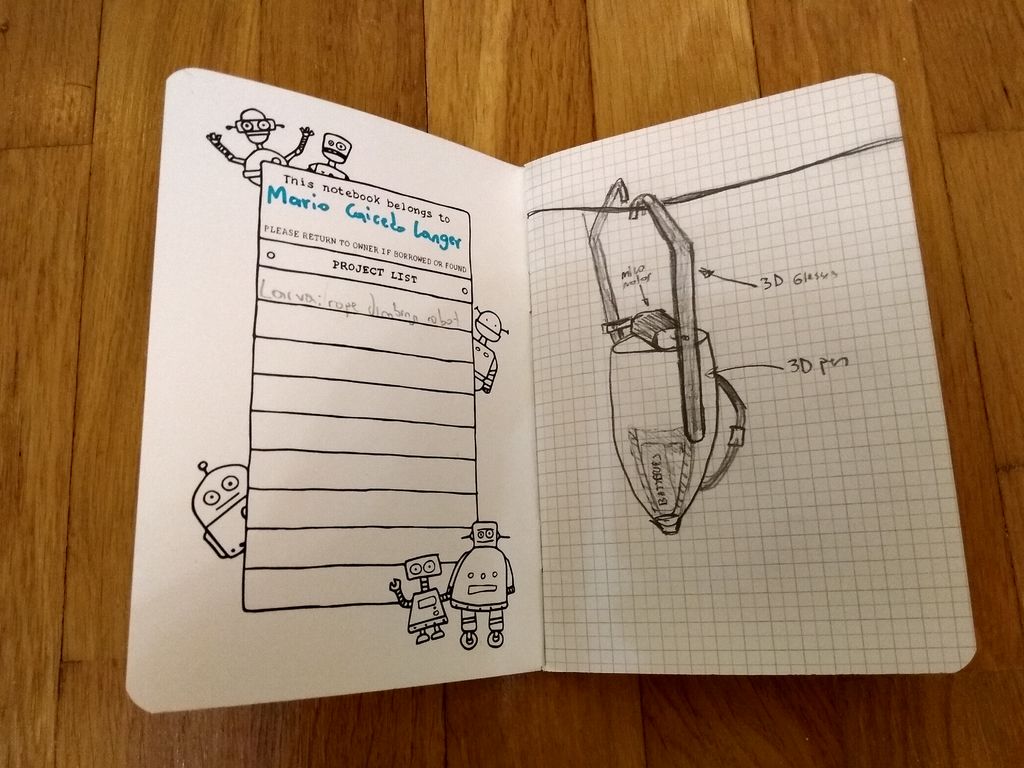
下一步(这是你在我的教程中经常看不到的东西),我画了一个设计。用笔。如果我想让它工作,我需要用它来完成工程设计过程。
第2步:材料


因此,要构建此项目的Mark II,您需要以下材料。所有或几乎所有这些都是可回收的,只要您有带变速箱的电机,您就可以使用替代品。你需要:
1个破损的可充电3D笔
1个3D眼镜(或任何一种带有厚塑料框架的眼镜)
1个塑料瓶盖
1个小开关(可以从破损的玩具中回收,甚至可以从3D笔板上回收)
1个拉链
1废弃的陶瓷欧式汽车保险丝(或任何其他可用作曲柄的硬塑料小件)
电线(红色和黑色,最好)
螺丝,螺母,螺栓,垫圈
Superglue
焊锡
此外,您还需要以下工具:
Dremel旋转工具
热风枪
烙铁
螺丝刀
钳子
步骤3:打开3D笔



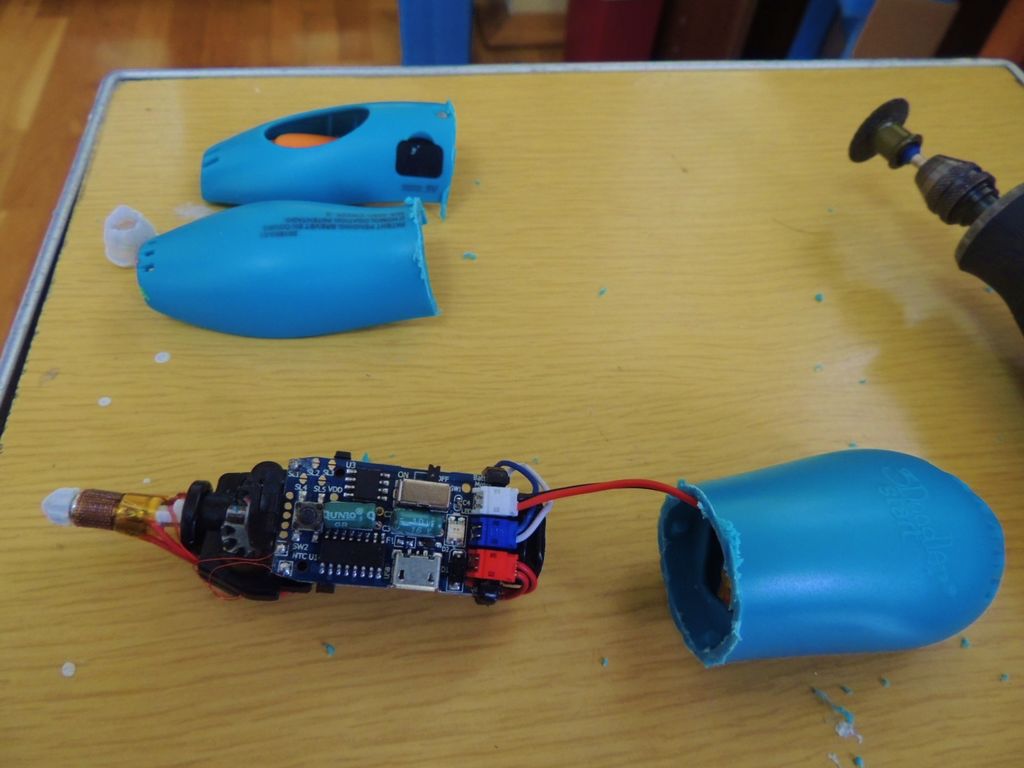
使用旋转工具,小心地从中间(最纤薄的部分)切割3D笔的外壳。但只有塑料部分!如果切割太多,可能会损坏可能对此项目或未来项目有用的电路板或其他组件。
我们将用于机器人身体的部分案例是电池的放置位置。小心地将它们与电路板的其余部分断开。
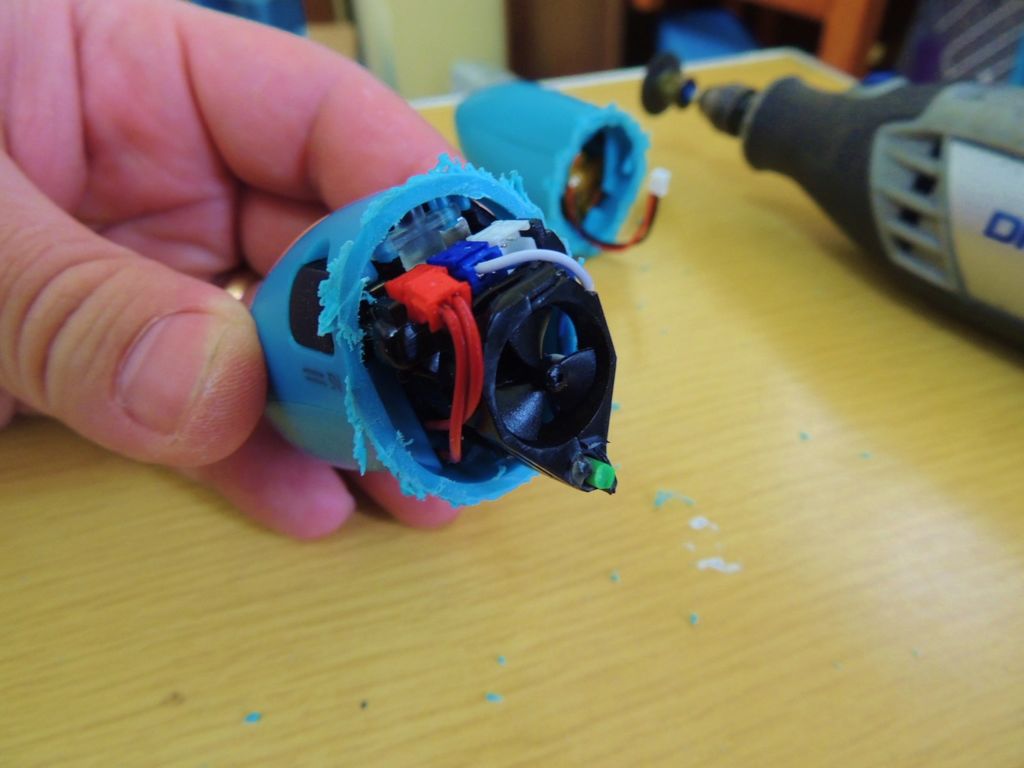
步骤4:挖掘必要的组件

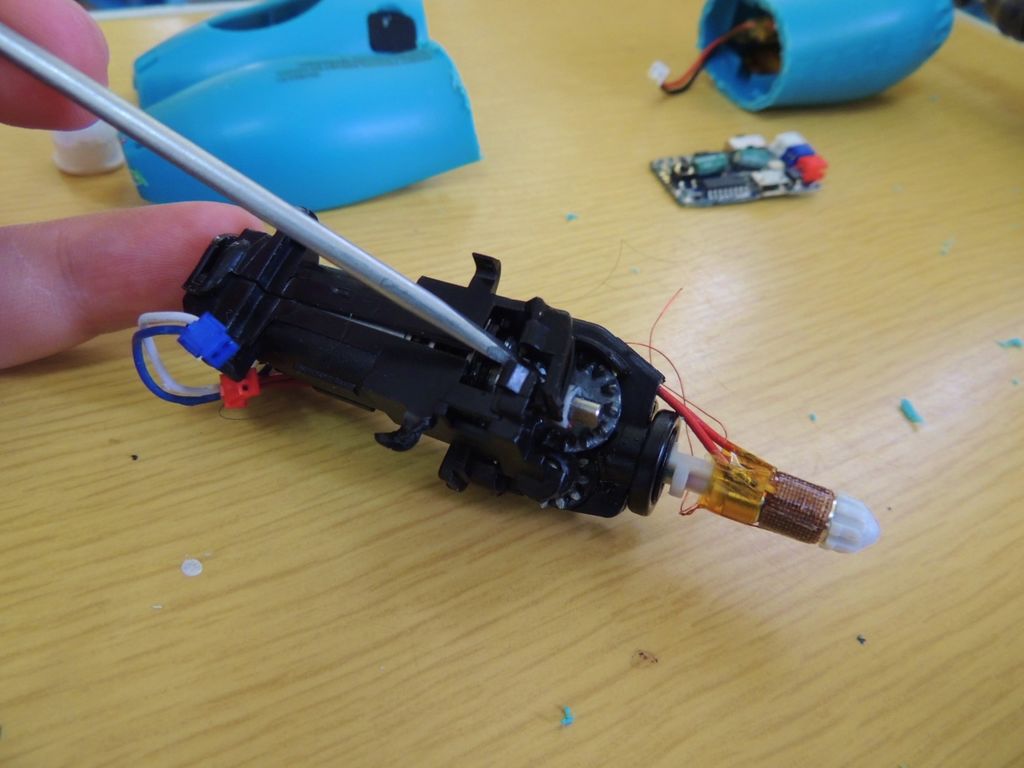
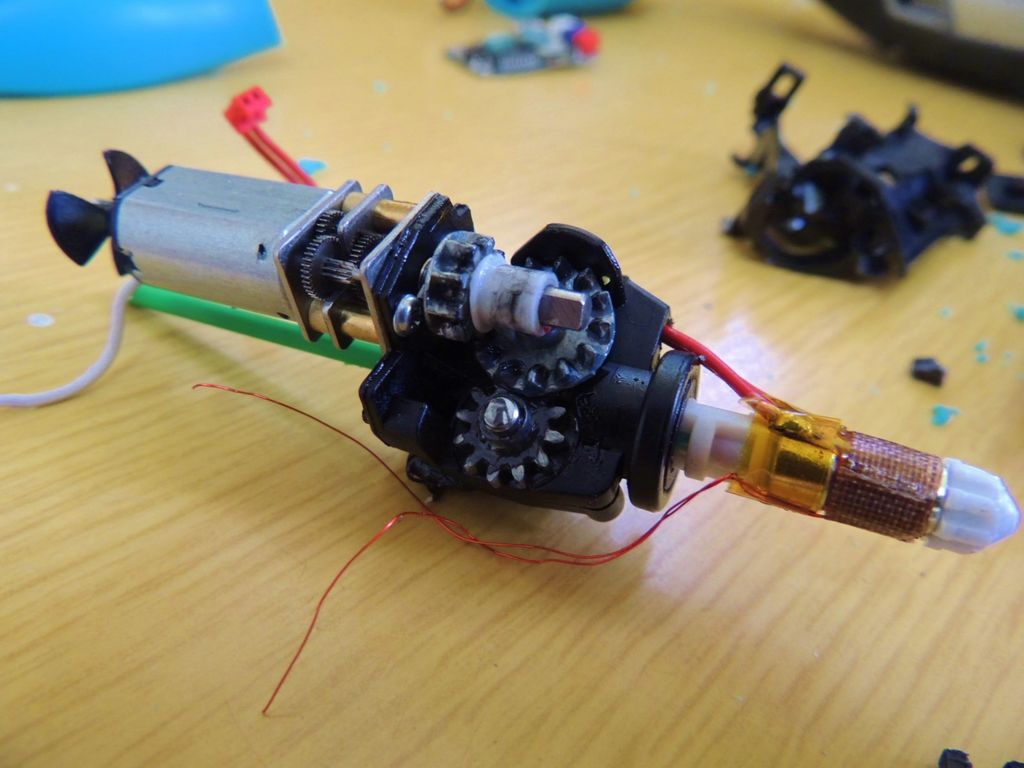


使用平头螺丝刀和小钳子,打开包含机械和电子部件的黑色外壳。基本上,您需要以下组件来创建机器人:
内置电池的情况:它将成为主体和电源。
电路板:它将转变为独立的电池充电器。
带齿轮箱的电机:它将移动机器人的手臂。
步骤5:电路的修改Board



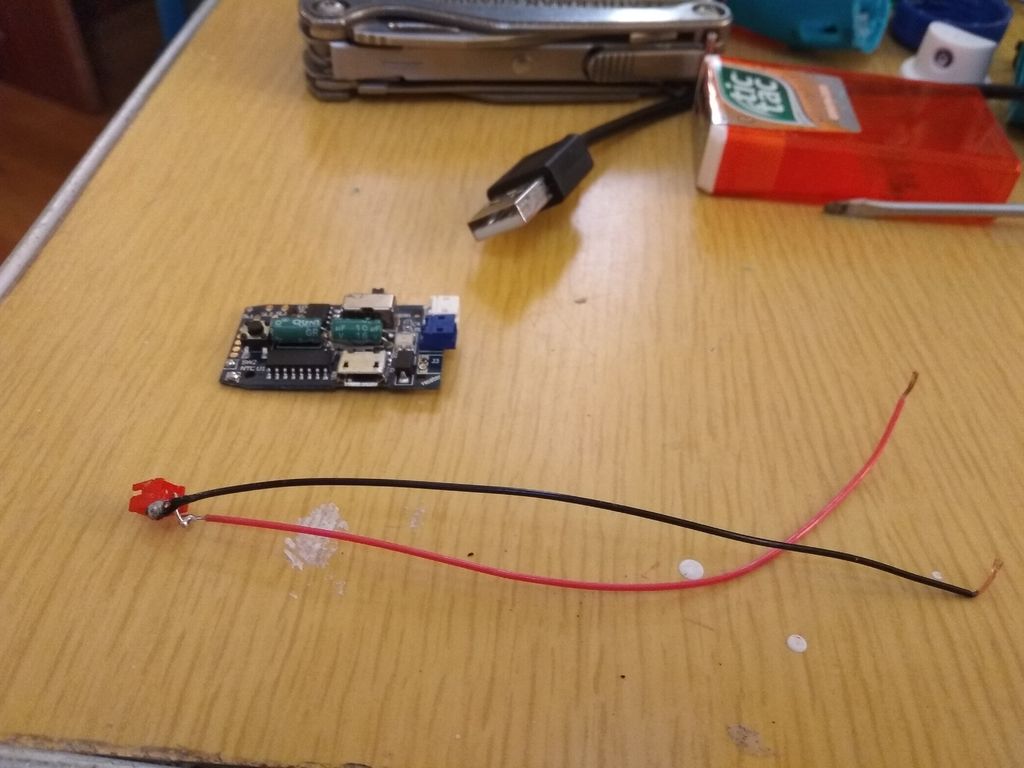
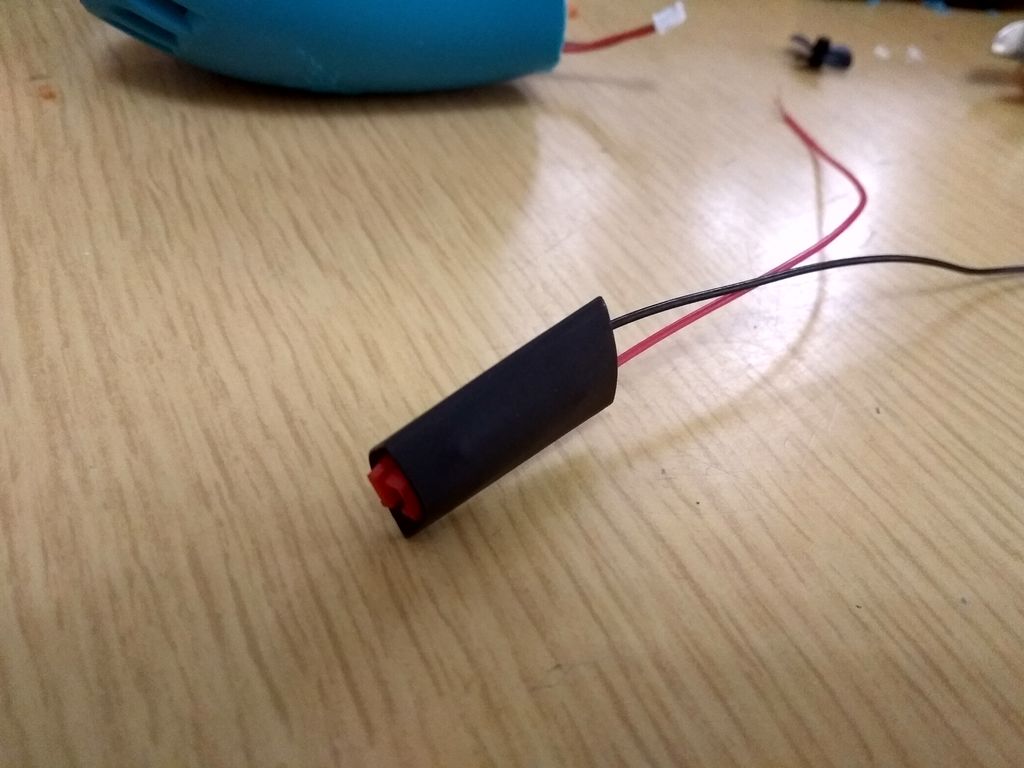

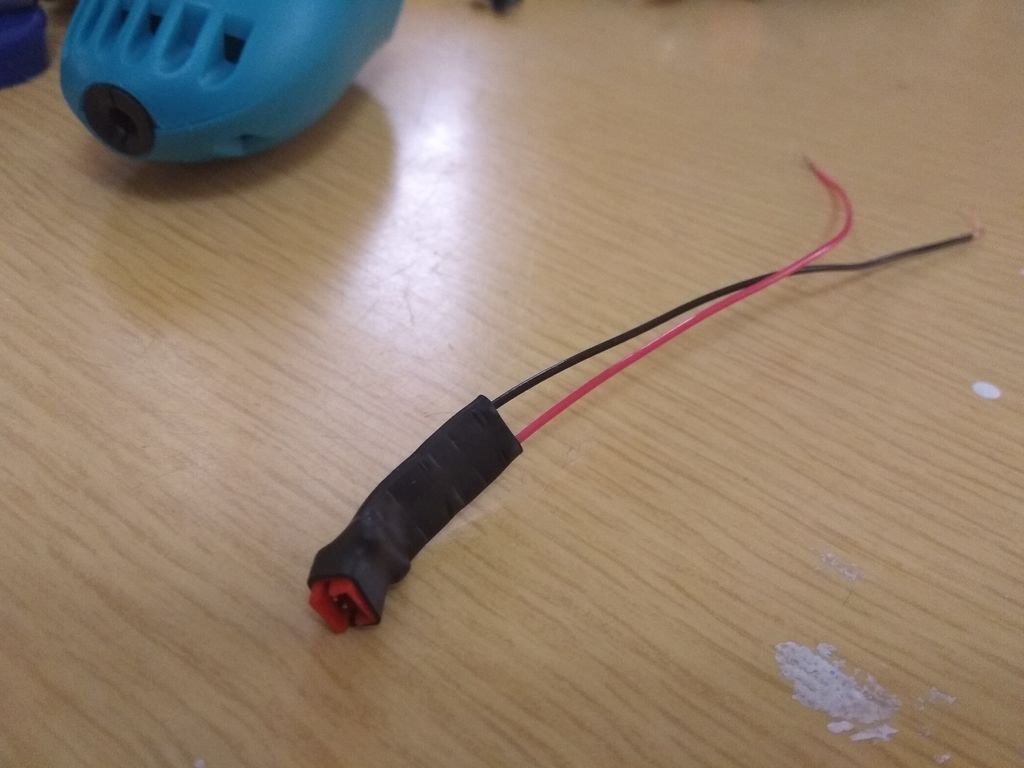
要为此机器人充电,必须从电机上拔下电池并连接到充电器。这意味着我们需要两个与电池插头兼容的迷你插座:一个在电路板/充电器中,另一个用于电机。你可以买一个新的。或者,您可以使用另外两个中的一个焊接到电路板上。
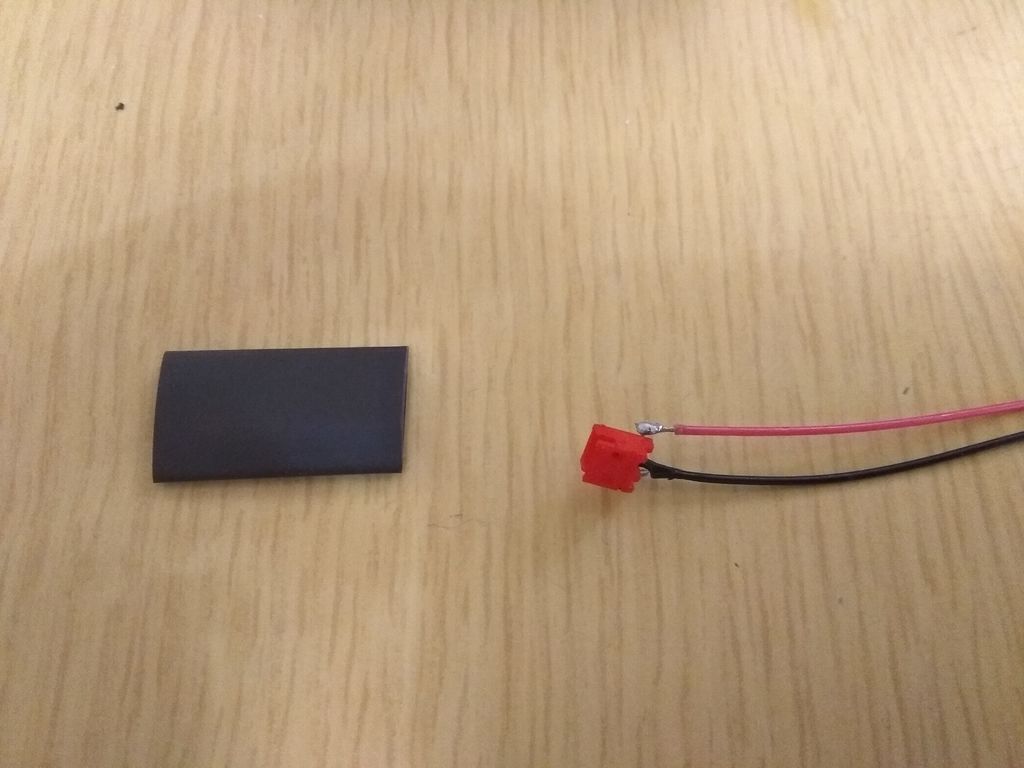
使用烙铁,取下红色迷你插座,并将电线焊接到每个引脚。我们将使用这个用于电机(后来,我也删除了蓝色的,用于另一个项目。)
最后,在插座上放置一些热缩管并将其暴露在热风枪,所以引脚受到保护。
步骤6:构建电池充电器


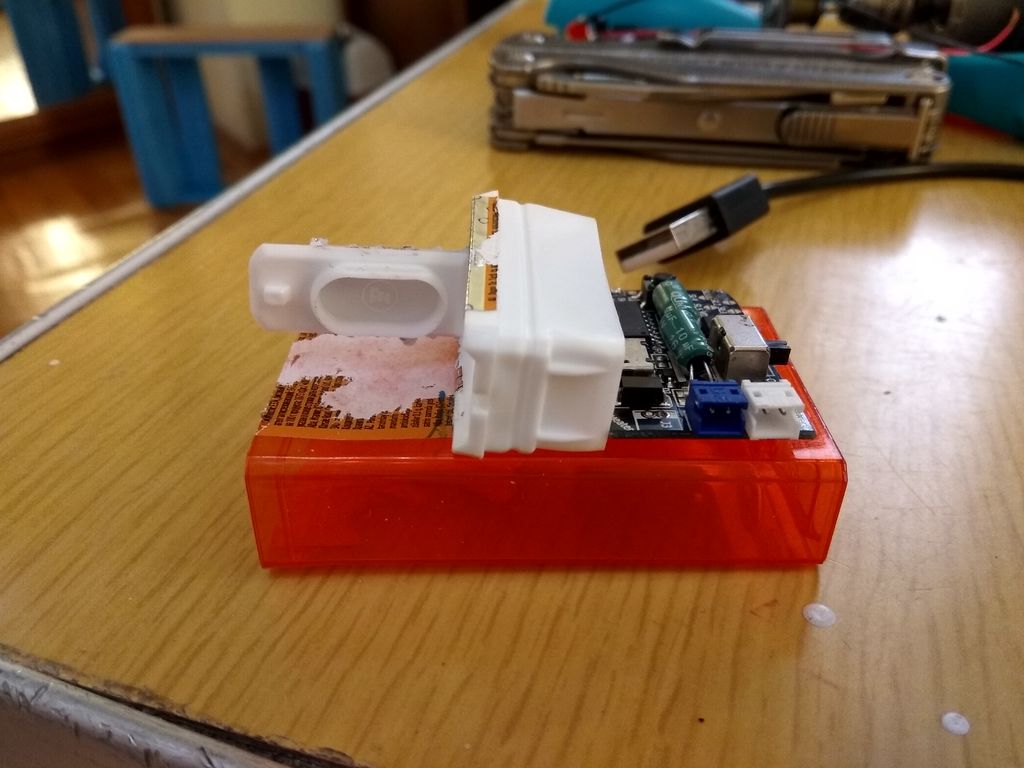

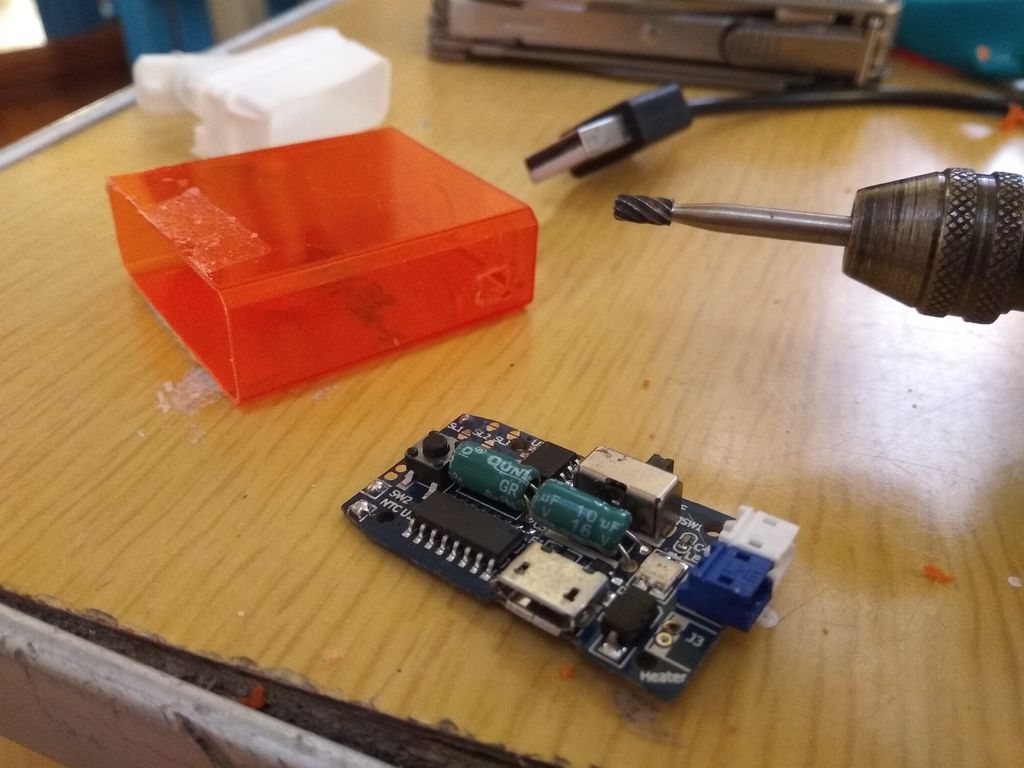


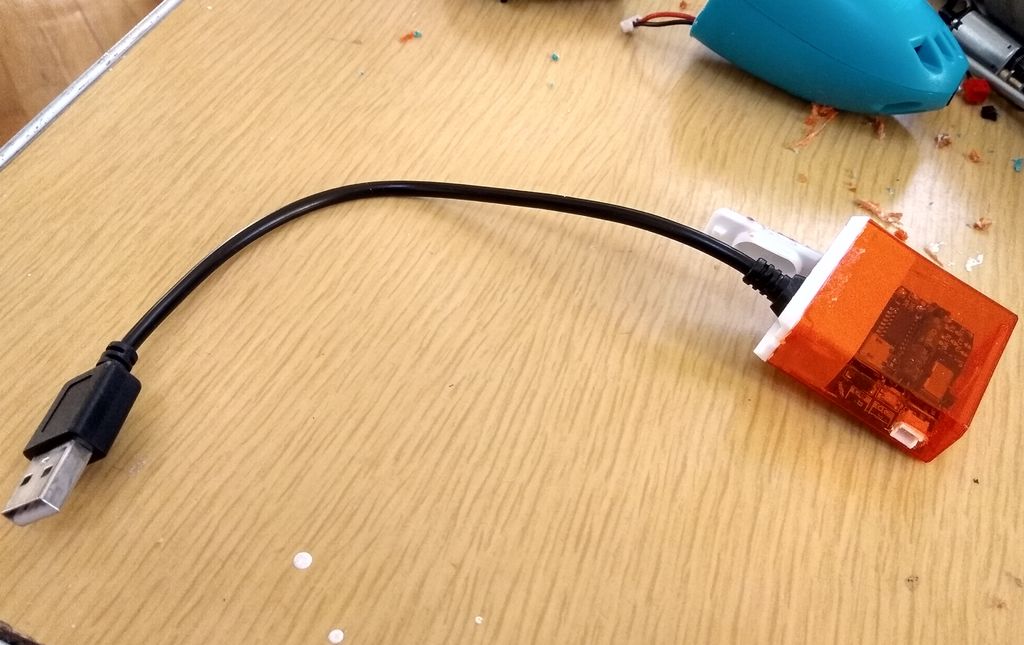
对于这部分,您将需要修改后的电路板, 3D笔和Tic Tac盒附带的USB线。
修改Tic Tac盒,以便您可以将板安装在里面。使用Dremel旋转工具。在插入电路板之前,请检查开关是否处于关闭状态(充电位置)。
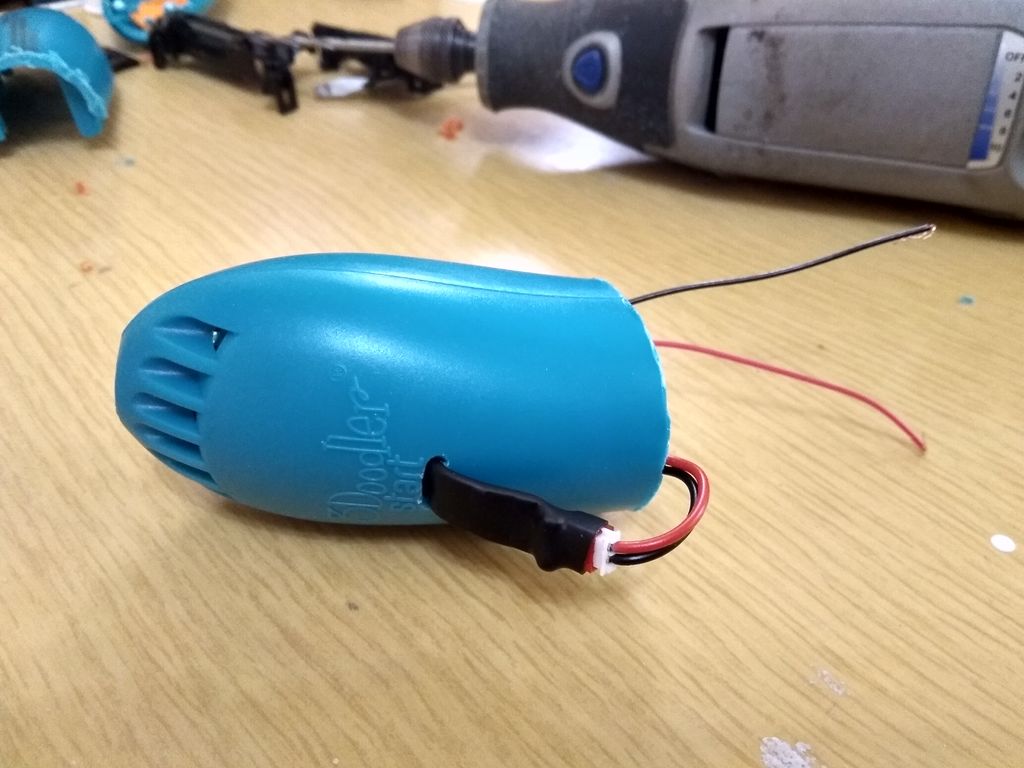
第7步:机器人的身体






使用Dremel,调整塑料盖以覆盖电池盒中的孔。这个盖子非常重要,因为电机会连接到它上面。此外,电池和电机的电缆将从侧面通过。
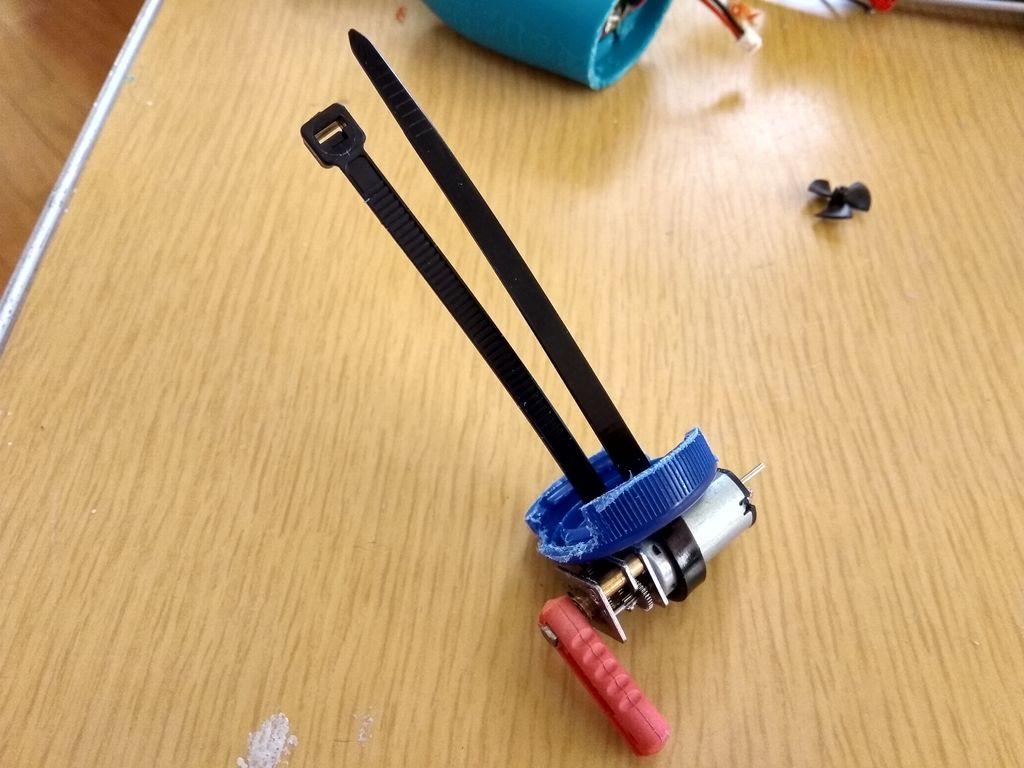
步骤8:添加曲柄并连接电机






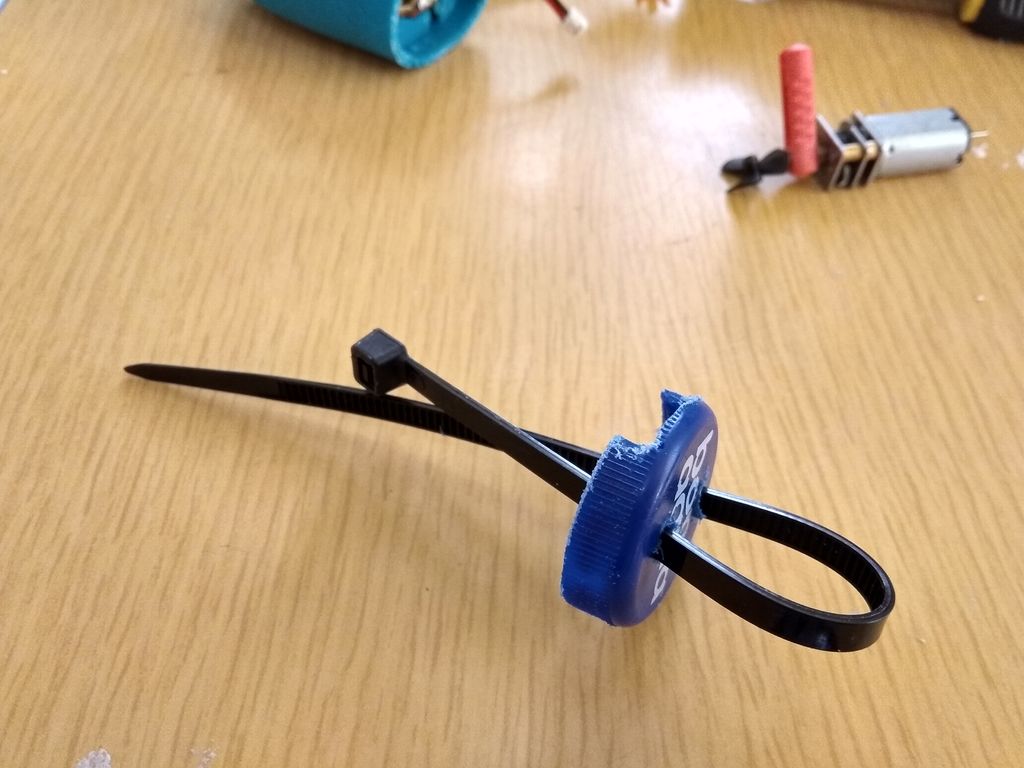
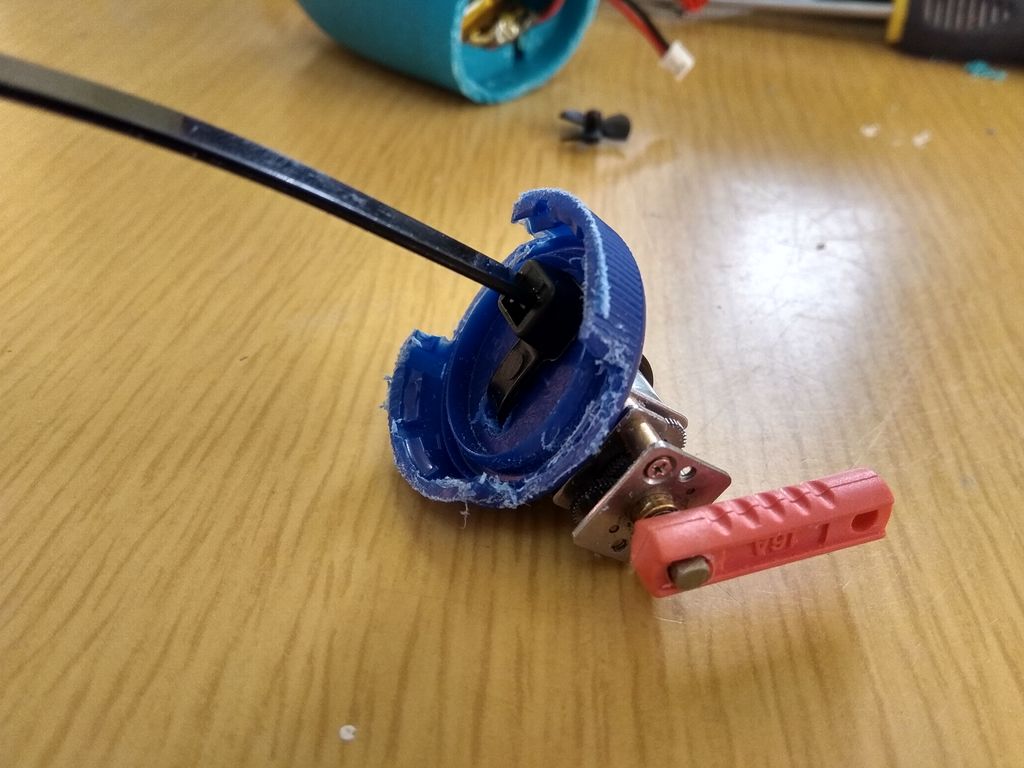




从电机轴上取下额外的附件。此外,您可能需要从轴上切下一段,因此它与曲柄的长度相同。
作为曲柄,我们将使用保险丝。检查它是否适合并适应Dremel或必要时添加一滴超级胶水(小心!不要堵塞齿轮箱。)
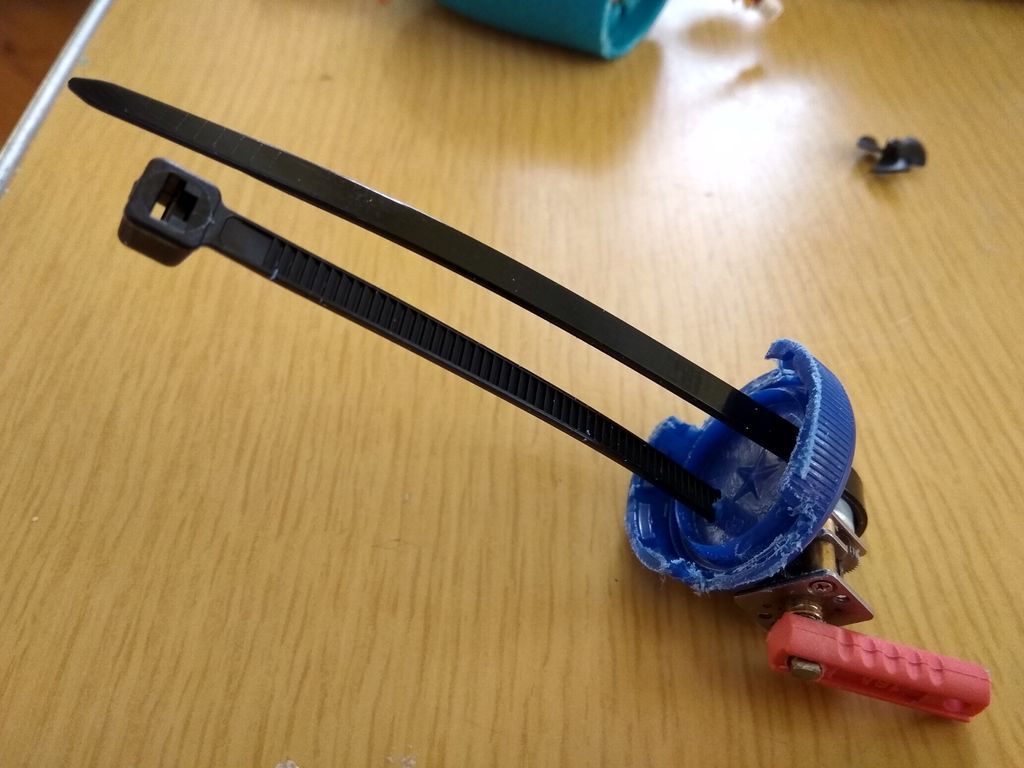
然后,使用拉链将电机连接到瓶盖上。然后,将瓶盖放入阀体并检查电机轴是否与壳体的裂缝对齐。
步骤9:电路



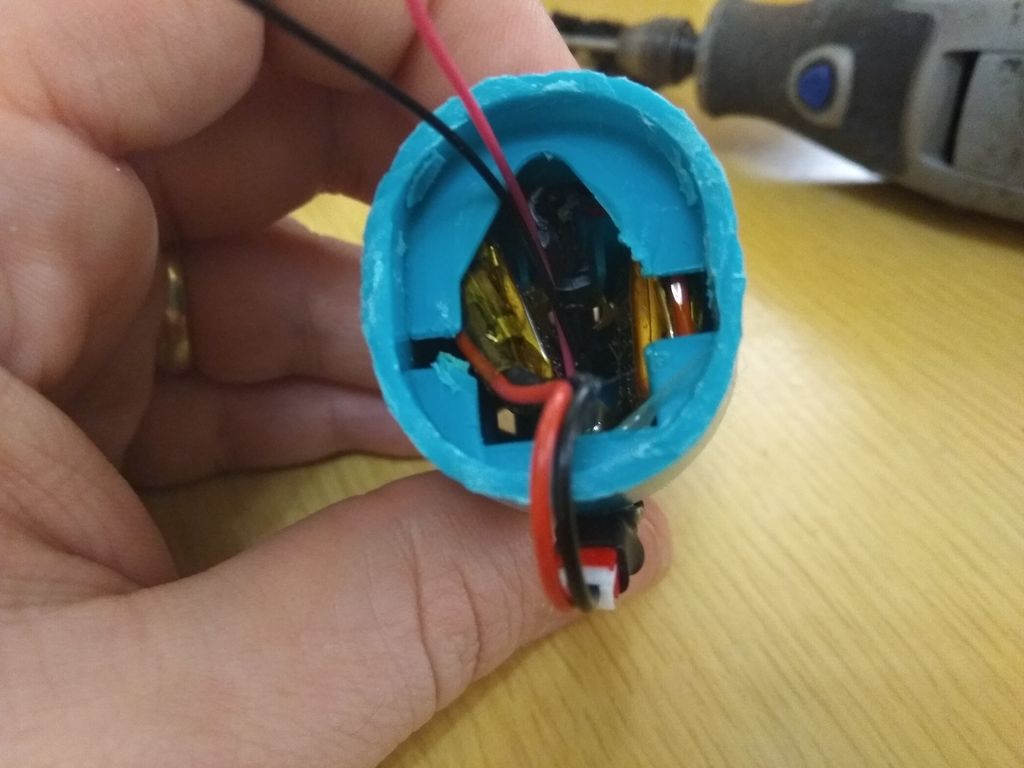


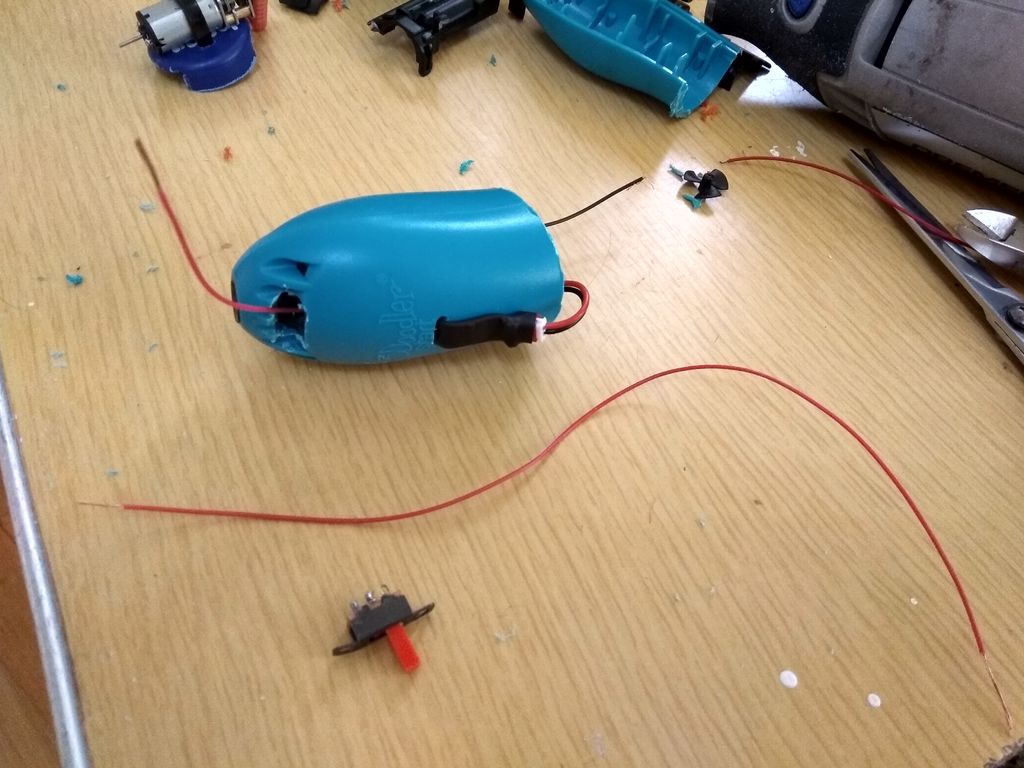




此机器人使用基本电路。但是,您需要对塑料外壳进行一些额外的修改。使用Dremel,在背面(对于步骤5的迷你插座和电缆)和底部(放置开关)打开一个孔。
将迷你插座连接到电池,然后将它插入孔中。一根电缆将连接到电机的一个引脚。另一个,到交换机的一个引脚。然后将额外的电缆从交换机的中心引脚连接到电机的另一个引脚,试图将所有电缆保持在外壳内(只有外露的电缆是电池的插头和插座。)
在每个连接处使用烙铁和焊接薄。
最后,将塑料盖放在电机上,用小螺钉将其固定在外壳上。
步骤10:移动臂
















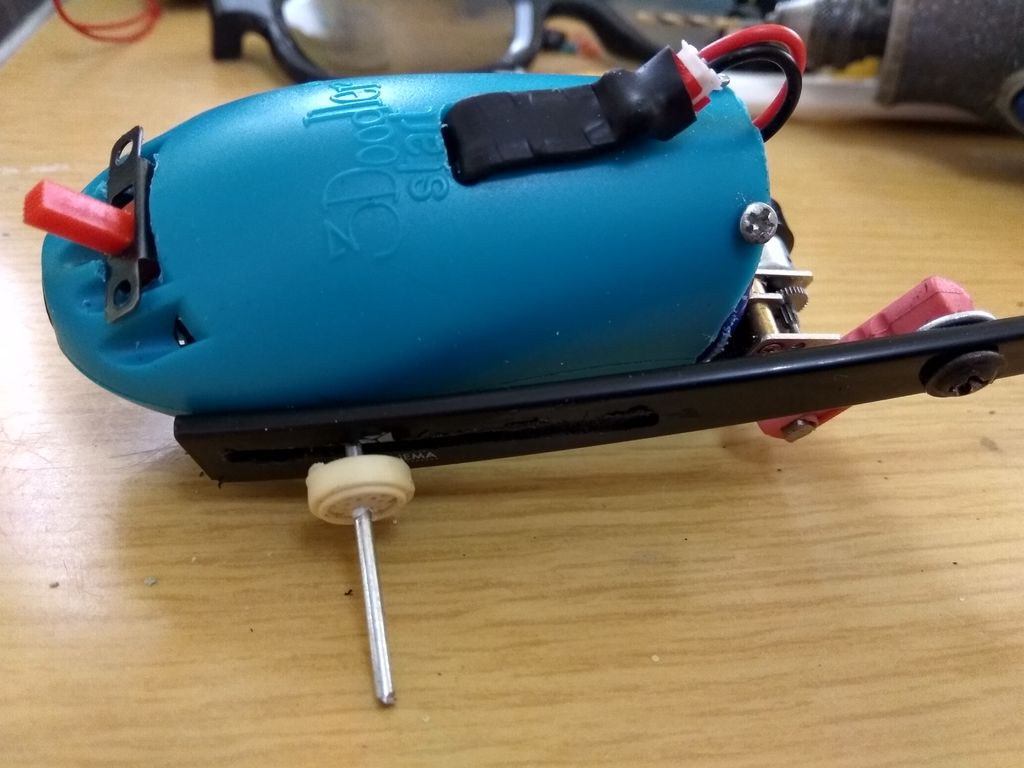

拿起3D眼镜并取下腿。其中一条腿将是机器人的移动臂。钻一个洞,在照片中显示的点上画一个凹槽。然后用螺丝和金属垫圈将其固定在曲柄上。
在外壳上钻一个小孔,小心不要刺破电池。从小玩具车上安装金属杆,并用强力胶粘合。然后,插入一个小车轮以保持移动臂就位。
步骤11:静态臂
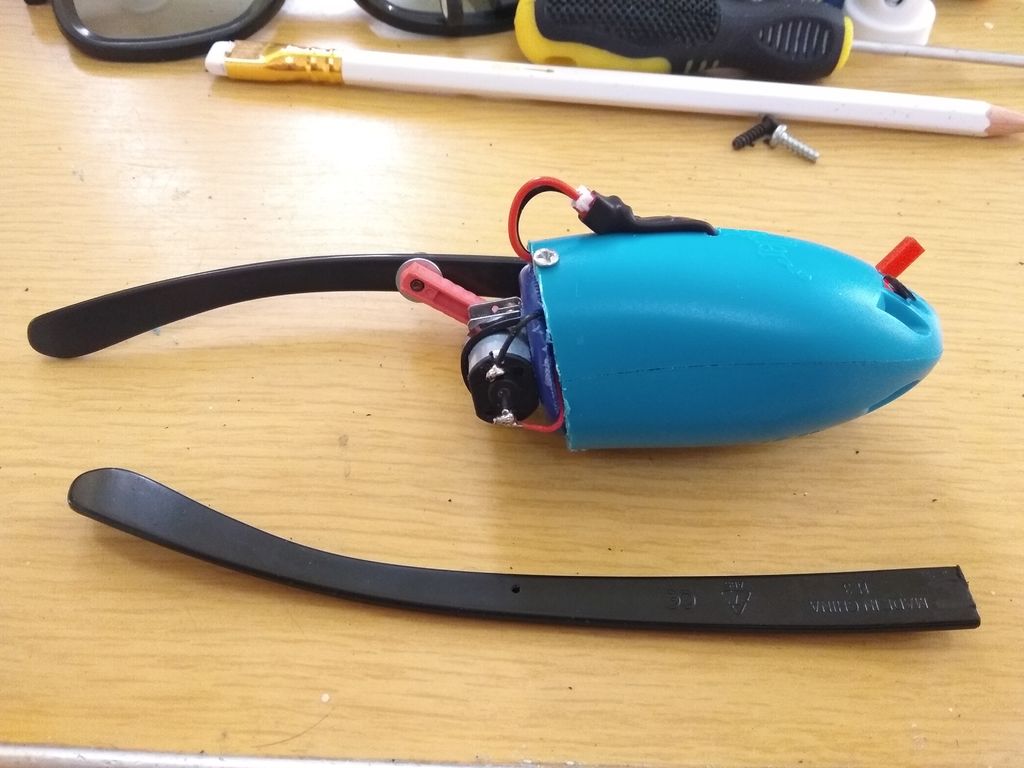




另一只手臂将固定在身体上。在移动臂的相同位置钻一个孔,然后在电机轴的另一端(没有变速箱的那个)将它串起来。将手臂的其余部分连接到身体上,再次注意不要刺穿电池。
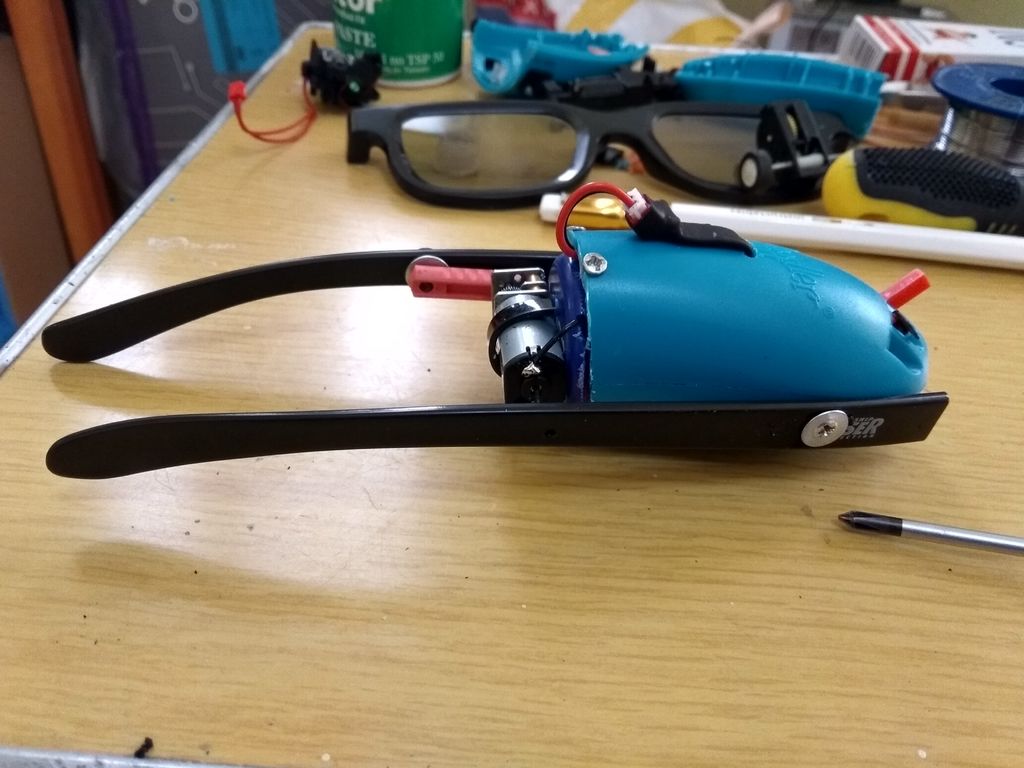
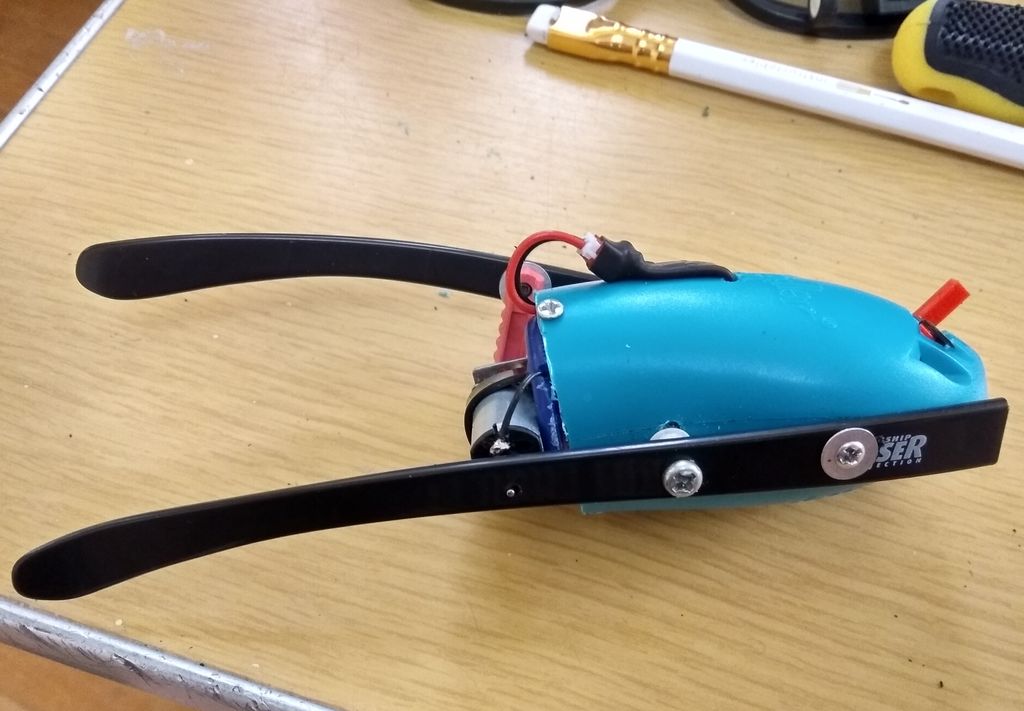
步骤12:手臂挂钩





使用热风枪,模制手臂以形成钩形,小心不融化机器人的任何其他部分。检查在运动过程中,两臂可以自由移动而不会相互接触。此外,钩子必须相互通过,因此它们都可以毫无困难地抓住绳子。
-
机器人
+关注
关注
213文章
31444浏览量
223669
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
绳子驱动的机器人,会是未来吗?

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
什么是机器人?追溯机器人技术的演变和未来

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
工业机器人与协作机器人概念不同




评论