 基于ESP8266制作的简易机器人
基于ESP8266制作的简易机器人

第1步:我们需要什么:
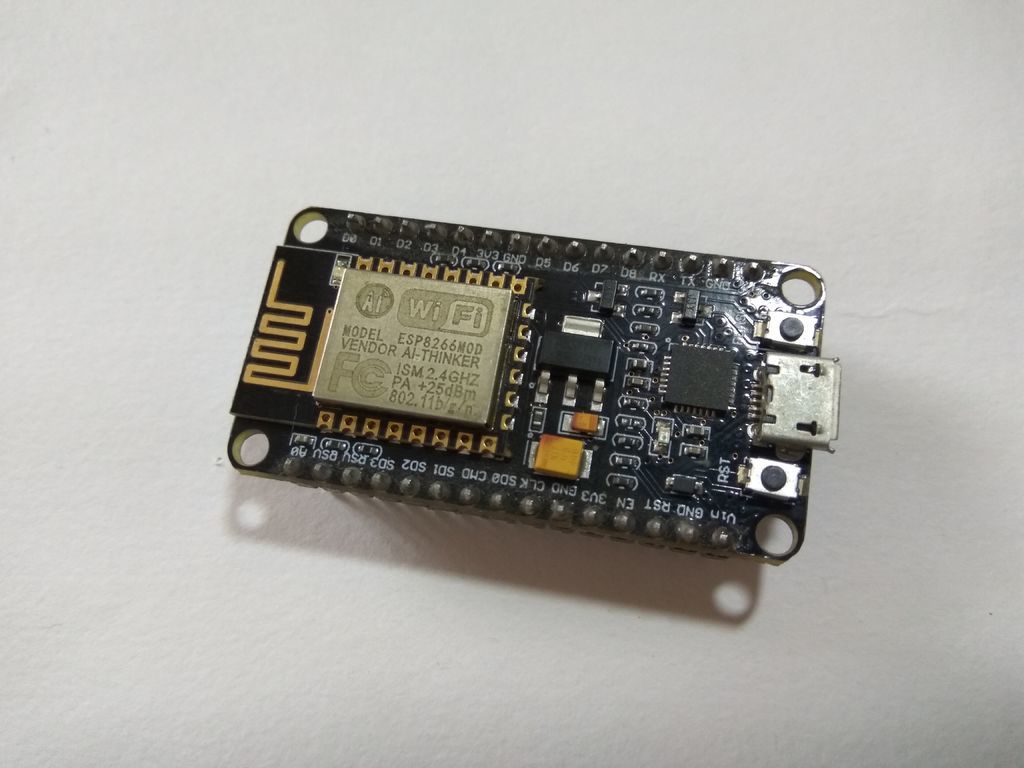
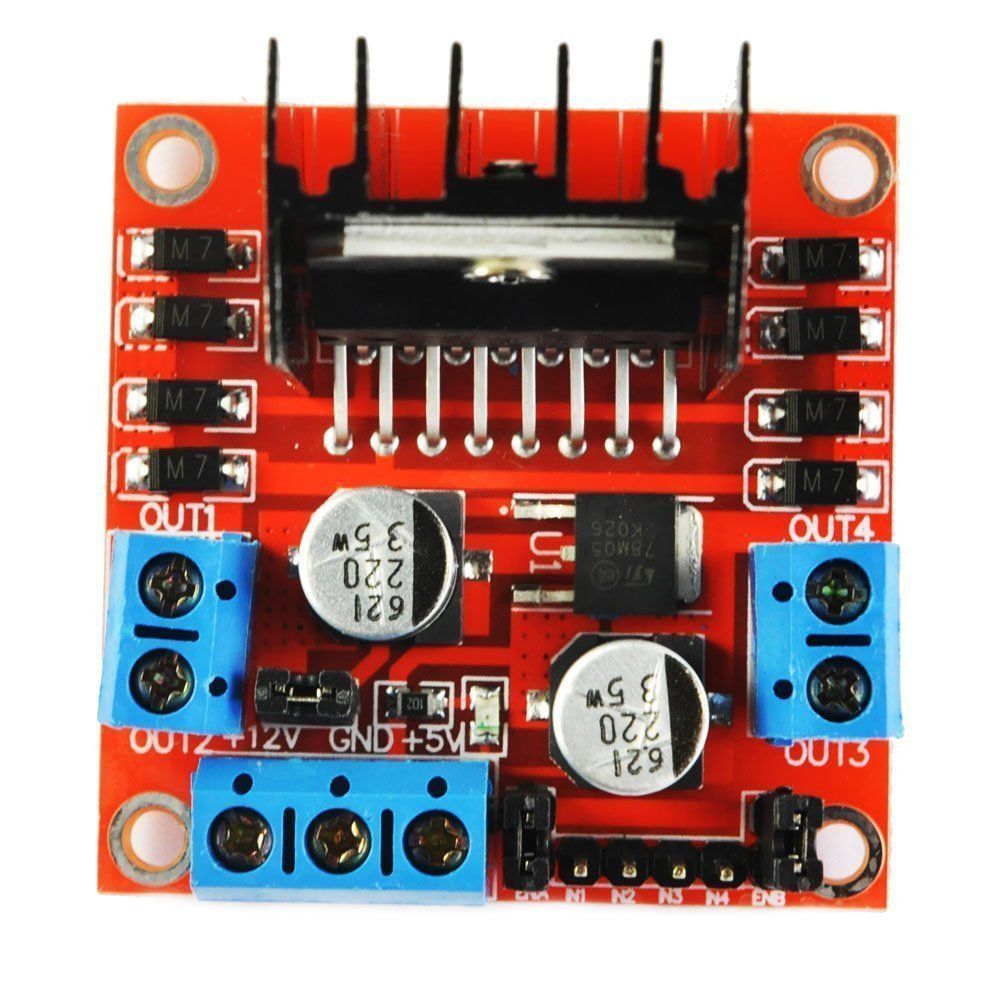


硬件组件: -
L298N Motor Driver。
2 x直流减速电机。
9 -12v电池。
迷你面包板。
软件组件: -
Arduino IDE。
Arduino Remote LITE。
RemoteMe帐户。
对于机器人的机箱,我使用了泡沫板。
步骤2:设计机箱: -
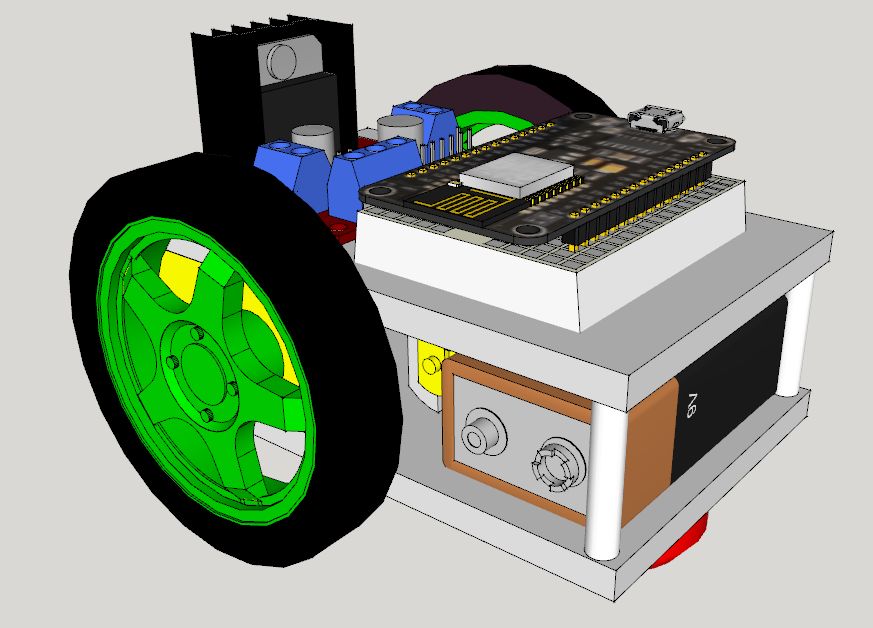
如前所述,我为机器人做了基础使用泡沫板。下面我提供了机器人的Sketchup文件。您可以下载并使用Sketchup查看它。它是一种付费软件,但如果您将其下载用于教育用途,则可以免费使用。
或者您可以在线购买机箱。
第3步:设置: -
现在我们必须设置环境来控制我们的机器人。
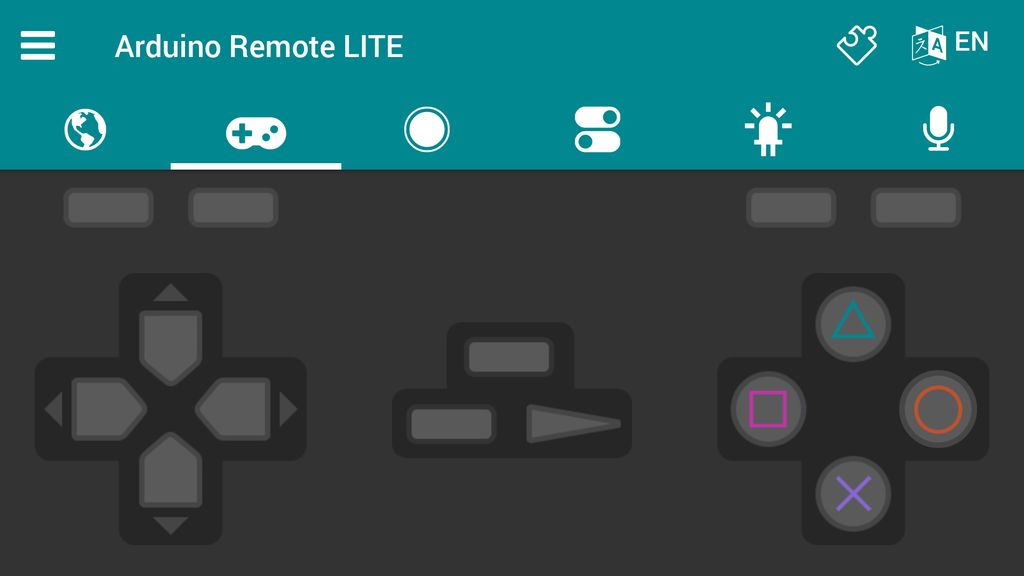
首先继续从playstore下载Arduino Remote LITE应用程序。
现在打开已安装的应用程序并转到》》 RemoteMe并使用您的RemoteMe帐户登录。
如果您还没有帐户,请转到》》 RemoteMe.org并创建一个新帐户。
登录应用程序后,请访问RemoteMe.org,使用您的帐户。
现在我们必须创建2个设备,这将帮助我们使用网络浏览器控制机器人,网络浏览器是一个网络设备,它将为我们的ESP板生成代码并将其连接到服务器。
制作网络控制器: -
首先转到“设备”(您可以在左侧的菜单中找到它)。
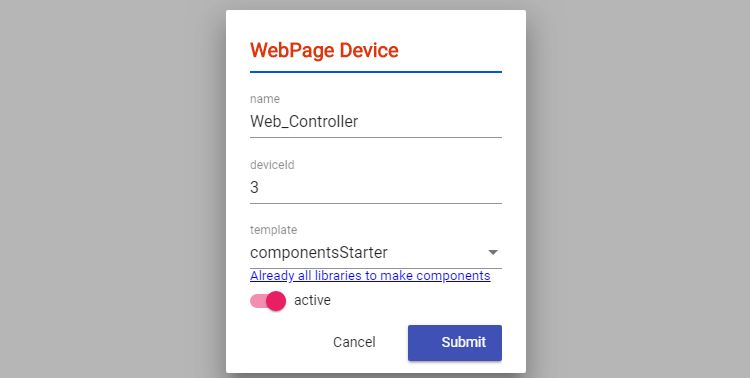
现在创建一个新设备,转到》》新设备》》新网页。
将出现一个弹出窗口,此处我们将为设备命名并为其指定唯一ID。
我们将其命名为“Web_Controller”,设备ID可以是“3”。 (名称和设备ID可以是您想要的任何内容,但对于本教程,请保持与我的值相同)
现在保持模板不变并提交。这将创建一个新设备。
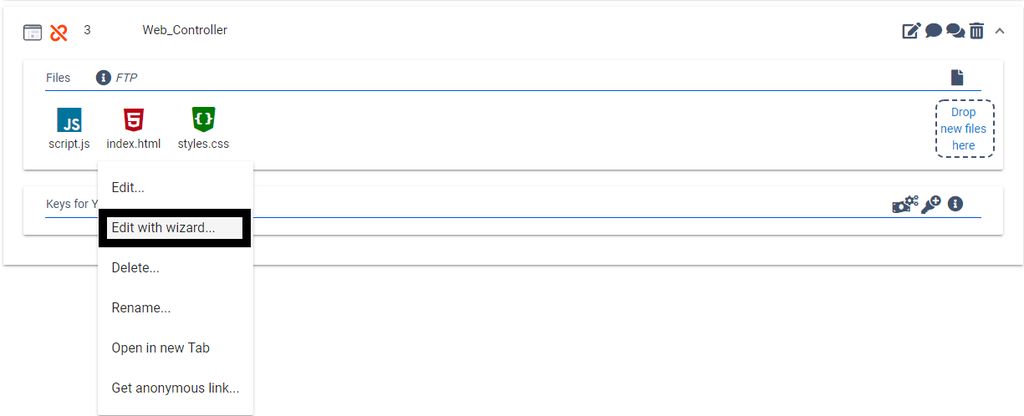
是时候编辑设备了,首先点击设备然后在Index.html上叮当作响。
您将看到一个下拉列表,此处选择“使用向导编辑”。
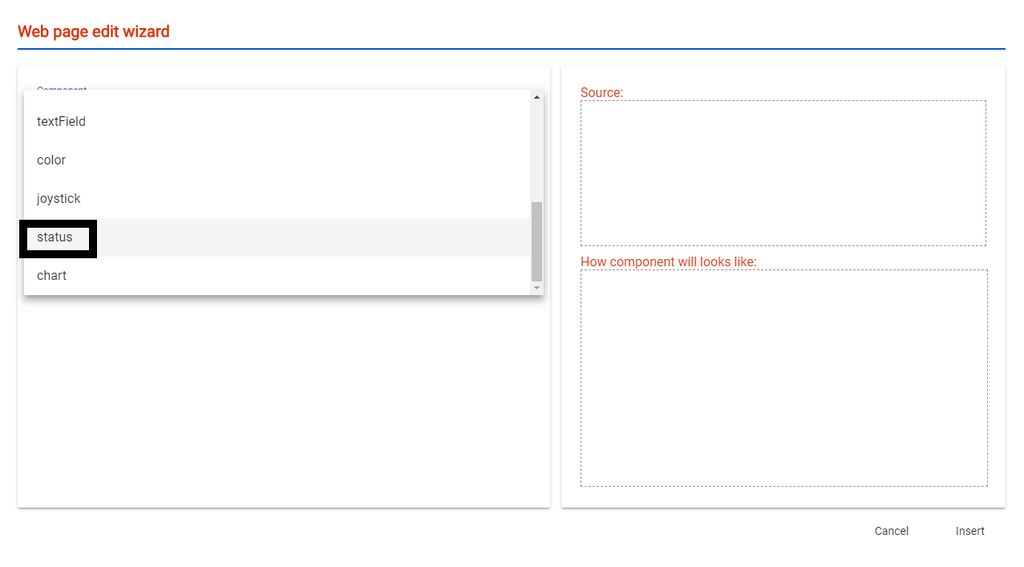
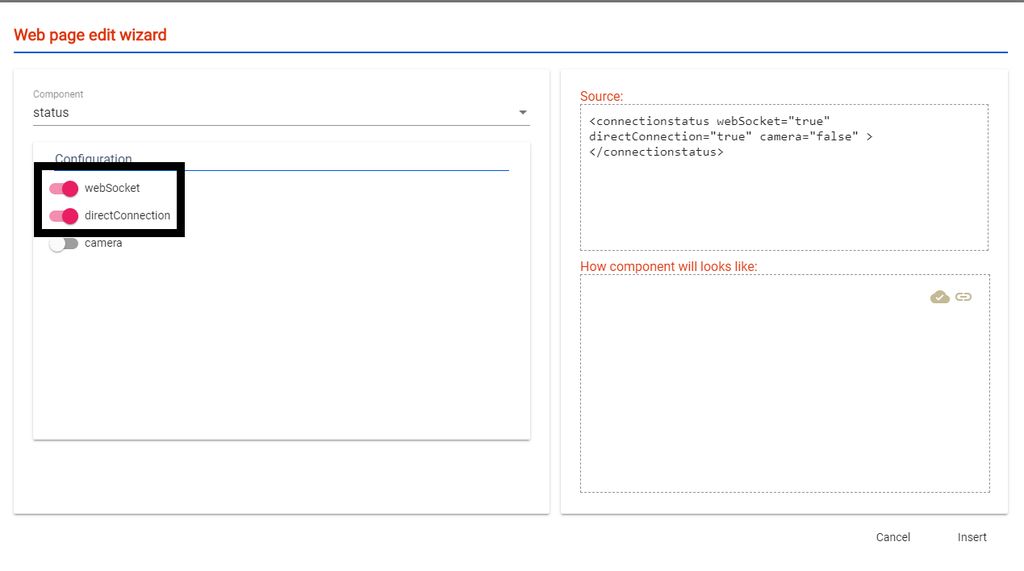
现在转到“组件启动器”,在这里,您将从列表中选择组件“status”,在“webSocket”和“directConnection”的配置切换中。插入组件。
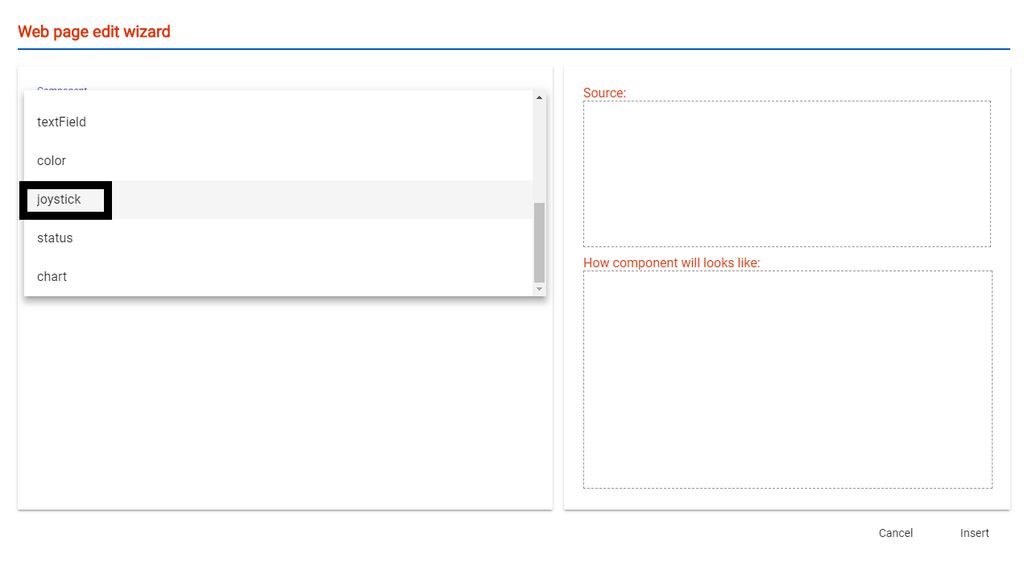
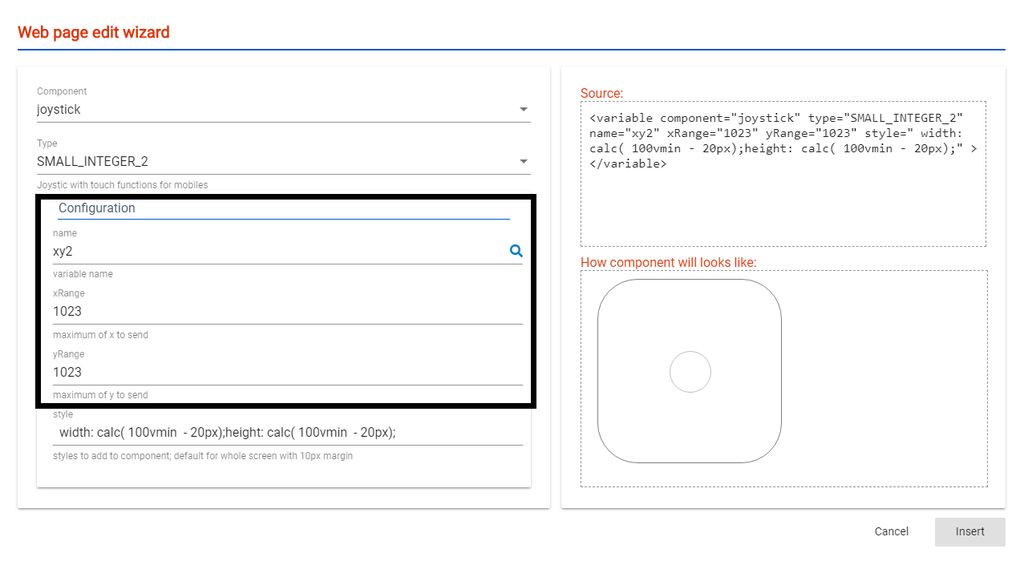
现在制作另一个组件,这次选择“操纵杆”现在进行如下更改: -
名称:xy2
xrange:1023
yrange:1023
并插入零件。就是这样。
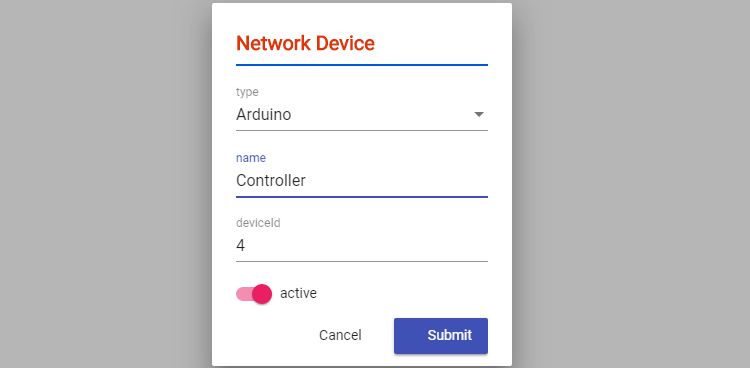
制作网络设备:
像以前一样创建新设备,但这次选择“新网络设备” “现在将其命名为”Controller“和设备ID”4“。
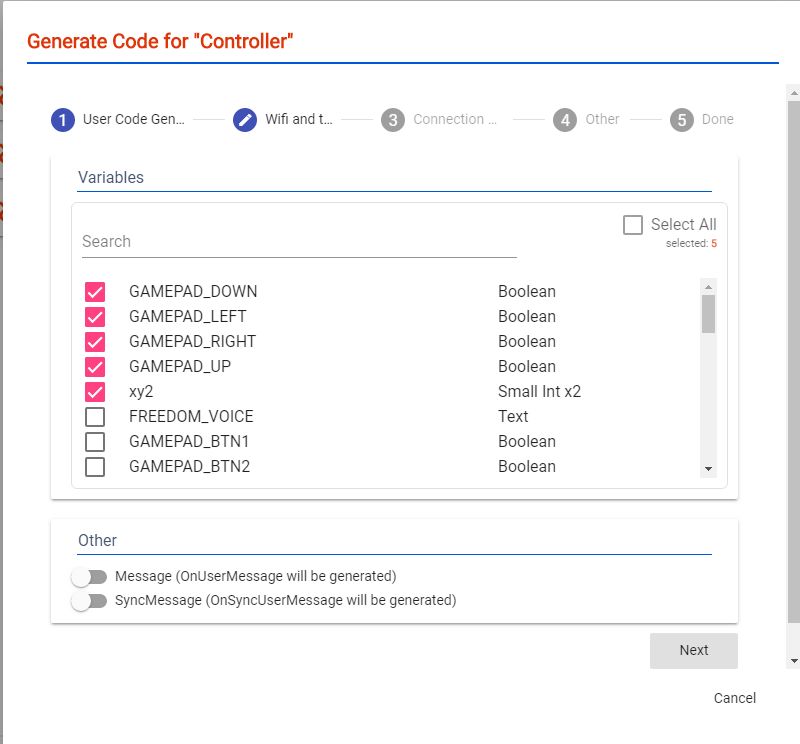
现在在创建的设备上,单击汉堡菜单并选择“代码生成器向导”
现在选择图像中显示的变量,然后单击下一步。
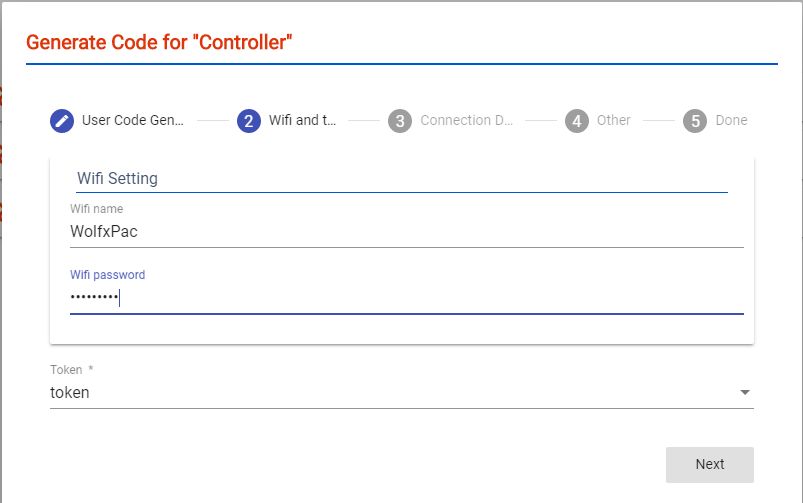
输入您的WiFi名称和密码,然后单击下一步。
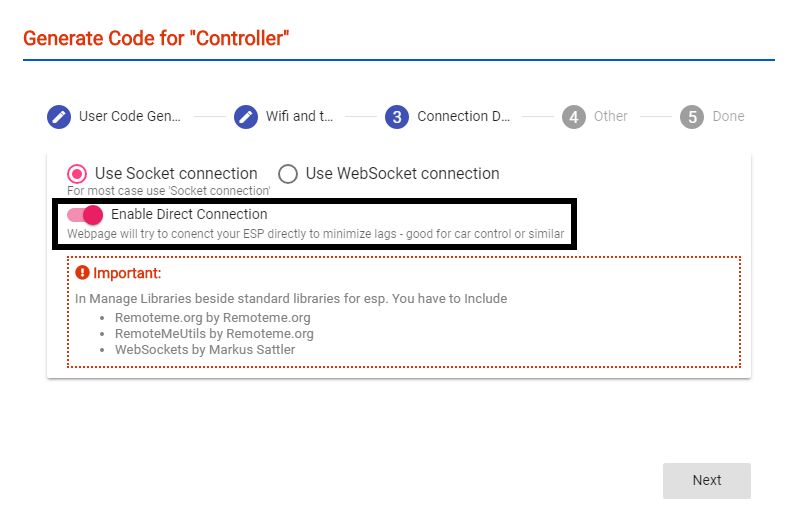
现在确保启用直接连接。
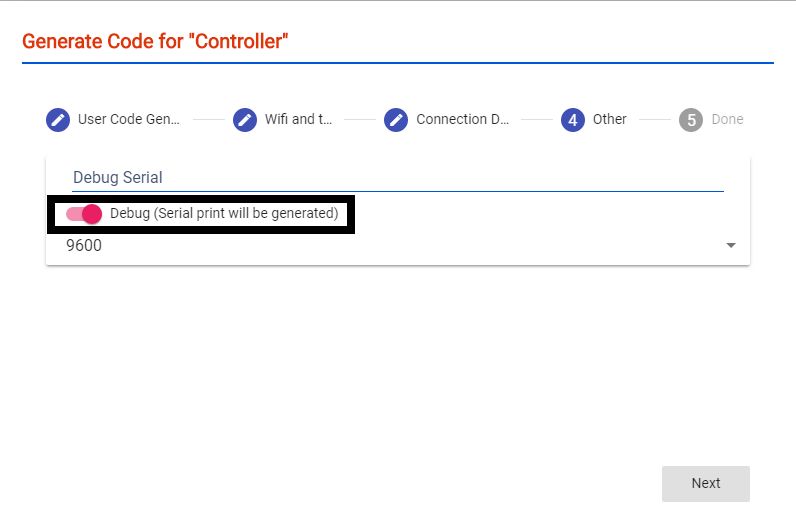
接下来,您可以根据需要启用调试选项。它将在串行监视器上显示值。
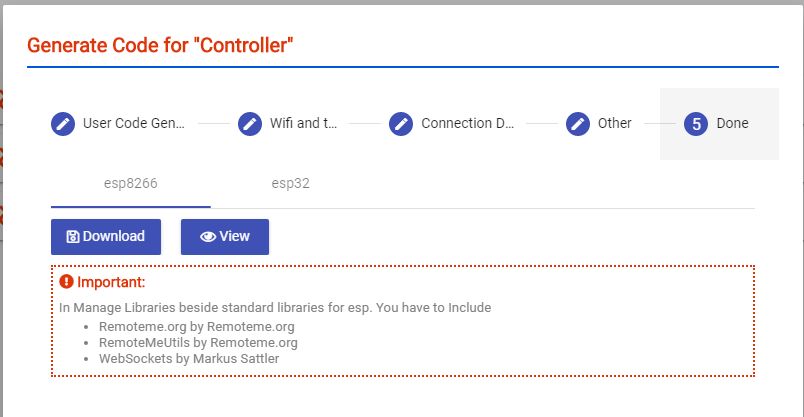
现在您可以下载代码。
完成后,我们可以继续编辑代码。
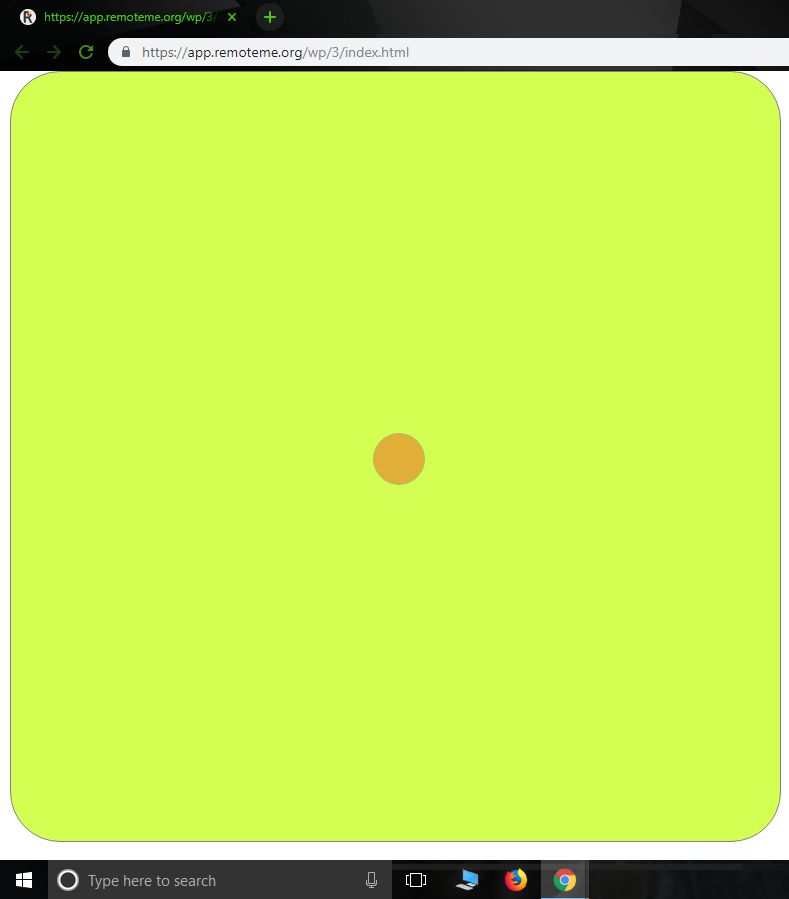
要使用Web控制器,只需单击在“Index.html”文件中,并在新选项卡中打开。
或者您可以获得匿名链接。它会给你一个链接和一个二维码。使用智能手机扫描时,打开Web控制器,以便您可以使用移动浏览器控制设备。
第4步:编辑&上传代码: -
下载的代码可以直接上传到ESP,但不会让我们的机器人移动。
将它与我们的机器人或您想要的任何其他应用程序一起使用,当按下某个按钮或生成值时,需要执行某些操作。为此,我们需要编辑代码。
我在下面提供了一个编辑过的代码。您可以下载它,添加您的WiFi名称和密码,以及您的令牌。代码相当简单,所以我认为这里不需要任何特殊信息。
但是如果你理解有问题,可以随意提问:)
注意: - 上传之前代码确保更新库。
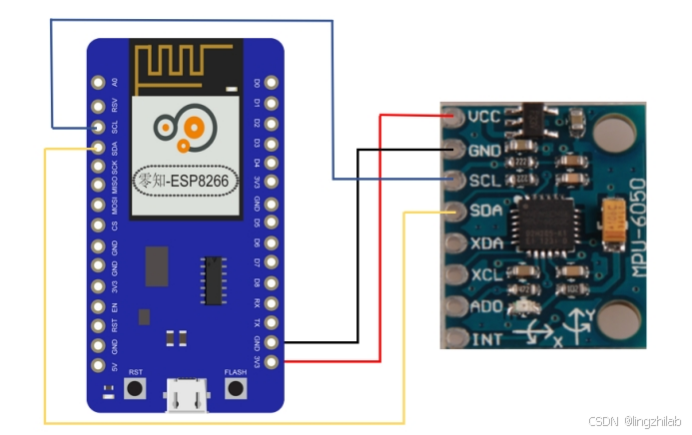
步骤5:电路: -
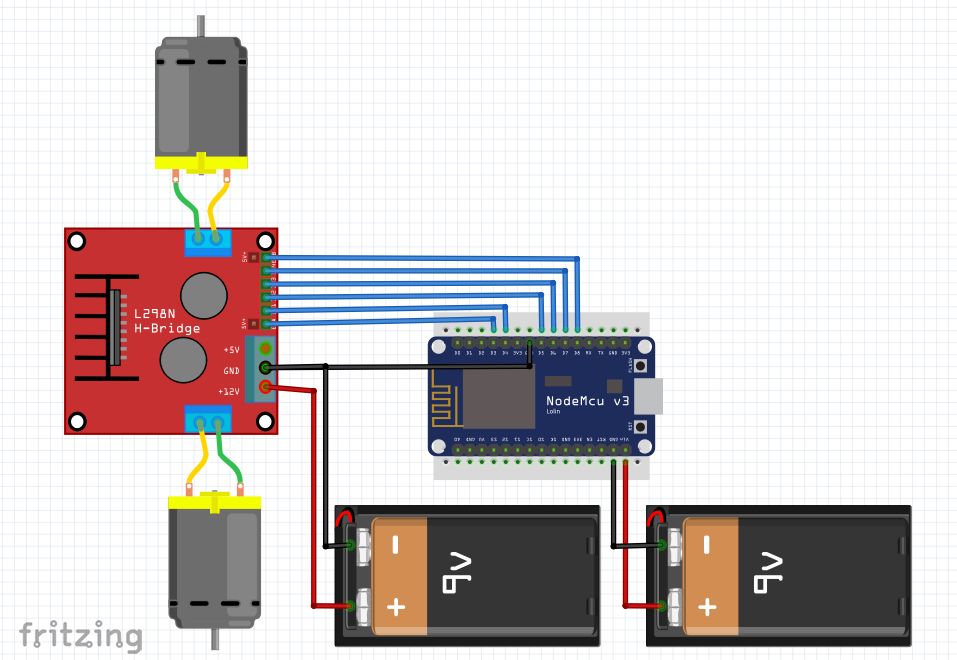
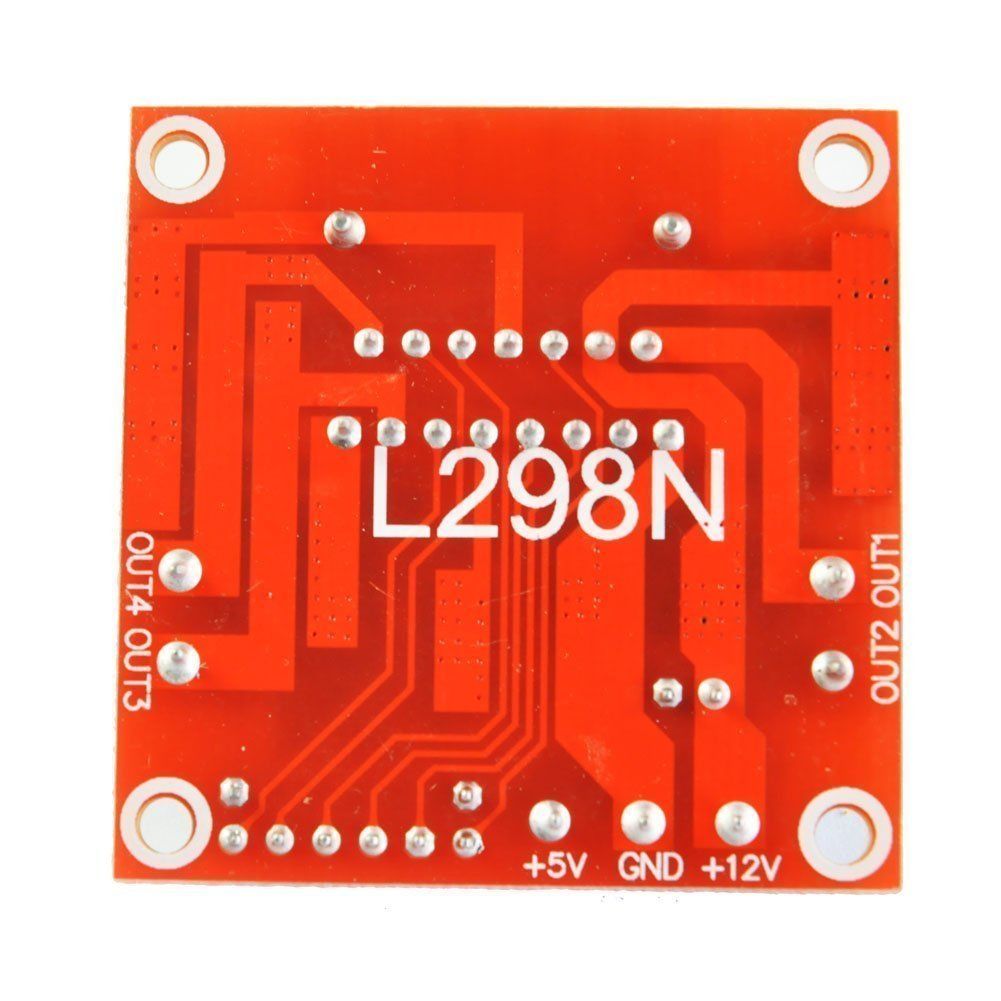
按照上图连接。我还在下面为Fritzing提供了文件。
关注连接: -
ENA = D3
IN1 = D4
IN2 = D5
IN3 = D6
IN4 = D7
ENB = D8
要为机器人供电,您可以使用两个9v电池分别为ESP和电机驱动供电,或者你可以用12v为电机驱动器供电,然后将驱动器的5V端子连接到ESP的Vin引脚。
在任何一种情况下,确保将ESP的Gnd连接到电机驱动器的Gnd端子。
连接完成后,请仔细检查所有内容并启动机器人。
第6步:测试: -
一切都完成后并且机器人已通电,它将连接到您的WiFi网络。现在,您可以使用计算机的浏览器,Android应用程序或移动浏览器控制机器人。
使用计算机的浏览器控制机器人。只需打开RemoteMe网站,登录您的帐户并转到设备。选择Web设备,然后单击“index.html”。现在选择“在新标签页中打开”。将使用操纵杆打开一个新选项卡,它将控制机器人。
使用Android Remote LITE应用程序控制它。打开应用程序,转到控制器,您可以使用箭头按钮来控制机器人的移动。
现在,您可以使用移动浏览器转到RemoteMe网站并执行与计算机浏览器相同的过程。
或另一种简单的方法是使用匿名链接。要再次使用此功能,请单击“index.html”文件并选择“匿名链接”。您可以转到链接或单击旁边的小方块图标。此图标将显示可使用任何QR扫描仪扫描的QR码,它会将您重定向到具有操纵杆的网页。
因此,使用上述方法可以控制机器人。
-
机器人
+关注
关注
213文章
30619浏览量
219691 -
ESP8266
+关注
关注
51文章
966浏览量
49030
发布评论请先 登录
晶科鑫 | 国产26MHz晶振匹配Espressif(乐鑫) ESP8285/ESP8266芯片案例

ESP8266和ESP32开发板常见的2种下载方式
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
ESP8266和ESP32开发板常见的2种下载方式
小萝卜机器人的故事
请问一下我想用ESP8685直接替换ESP8266而不用写程序,可以让ESP8685直接通过之前ESP8266的外挂的flash运行程序吗
【ESP8266】进入透传模式后,数据间隔怎么调整,
工业机器人的特点
STM32+esp8266连接机智云,上传温湿度数据并控制继电器开关(平台配置、代码生成、代码移植)

ESP8266烧录与机智云一键配网教程
盘点#机器人开发平台
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
零知开源——ESP8266+MPU6050 实现运动姿态检测





 工商网监
工商网监
评论