 可实时深组织成像并控制的微机器人系统
可实时深组织成像并控制的微机器人系统

想象一下,未来某天我们会制造出如细胞般大小,具有微纳米尺度的马达、汽车、飞机、潜水艇、甚至机器人。这些微纳米尺度的马达或机器人可以在我们的血液中游弋,携带药物运动到病患区域、最终治疗威胁人类生命的疾病。
今年,加州理工学院高伟(Wei Gao)教授研究团队和汪立宏(Lihong V. Wang)教授研究团队设计的可在肠道内实时定位并控制的微米机器人系统,正在向这些科幻作品中的情节一步步靠近……
这项合作完成的突破今天以An ingestible microrobtic system using photoacoustic imaging for targeted navigation in intestine为题,发表于Science Robotics,引起微纳机器人界的广泛关注。
常规的药物递送主要依靠血液循环运输完成,这种被动扩散方法受到多重生物屏障的阻碍不但导致有效剂量严重不足同时引发全身性的毒副作用,难以完成精准药物递送的需求。微纳机器人因其可在生物流体中进行可控自主运动,被认为是靶向药物递送的理想方案。但是,对于微纳机器人的实际医学应用,如何让微纳机器人实现在体内实时成像与控制仍然面临着挑战。
可实时深组织成像并控制的微机器人系统
面对微纳机器人体内深层组织下实时成像与控制的难题,Science Robotics今天上线的这篇论文,介绍了加州理工学院高伟教授团队与汪立宏教授研究团队合作的最新研究成果,该研究成果为解决微纳米机器人生物医疗中体内成像和控制的瓶颈难题提供了思路。
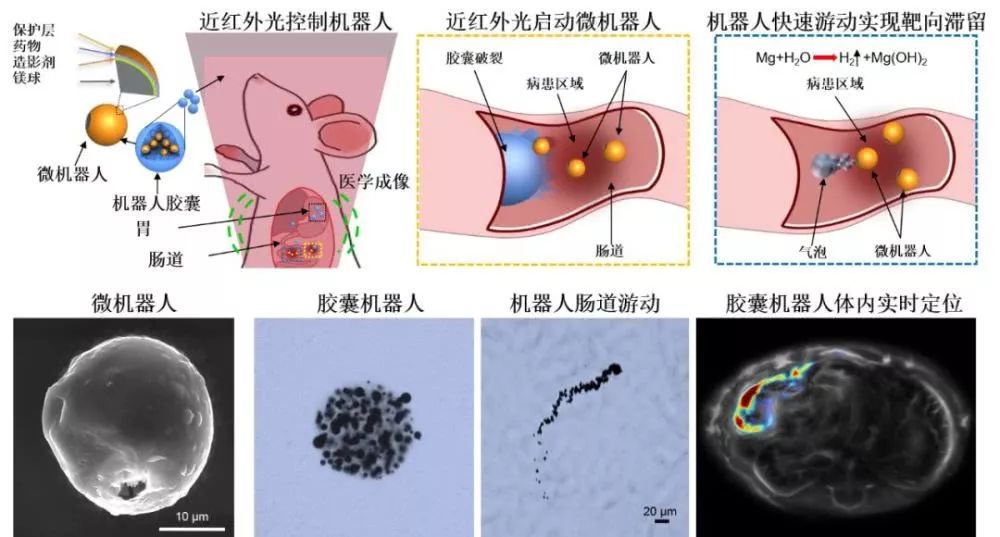
研究团队设计了基于光声断层扫描技术实现动物体内实施成像并控制的微机器人系统。他们将微米机器人包裹于具有保护层的微胶囊内以免于胃酸等流体的侵蚀,借助光声断层成像技术,包裹在微胶囊内的载药微纳机器人可在动物体内的实时定位,当微机器人胶囊抵达体内病患区域(比如肠道肿瘤)时,外源近红外光可以穿透深层组织并引发胶囊破裂从而释放微机器人。释放出的微机器人依靠其高效游动可穿越生物屏障最终实现在病患区域的滞留和持久的药物传递。
高伟教授认为,这种微米机器人可以穿透消化道的粘液并在那里停留很长时间。这有助于提高药物的供给,由于这种微米机器人主要由镁组成,因此具有生物相容性和生物可降解性。我们设想构建到达患病区域后可按需激活微型机器人,下一步的研究将着力于这种机器人的治疗效果。
汪立宏教授对于生物医学微纳米机器人的未来做了进一步的思考:你可以把这种微型机器人微放在你需要的地方,它们未来可以被用于药物递送或者智能微手术。高伟教授与汪立宏院士团队还将继续合作以期实现更多突破。
作为论文的通讯作者之一,高伟教授近年来致力于柔性电子、可穿戴设备和生物医学纳米机器人方面的研究并在《自然》、《自然 通讯》、《美国国家科学院院刊》、《美国化学会会刊》、《纳米通讯》、《美国化学会 纳米》、《先进材料》等期刊发表论文80余篇,总引用超过9000次,高引用次数 (H-index) 51。
-
柔性电子
+关注
关注
5文章
196浏览量
16624 -
纳米机器人
+关注
关注
0文章
44浏览量
12069 -
可穿戴设备
+关注
关注
55文章
3899浏览量
170327
原文标题:[机器人频道|物联网]加州理工微机器人体内实时成像调控并治疗疾病!
文章出处:【微信号:robovideo,微信公众号:机器人频道】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
Neway电机方案在机器人技术方面的优势
从PLC到机器人:实时操作系统如何决定能力上限
探索RISC-V在机器人领域的潜力
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
揭秘工业 4.0 机器人:感知、安全和控制技术

安森美如何推动具身智能机器人发展

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
海默RC系列机器人控制器




评论