您的项目需要加速度计、陀螺仪或磁场传感器吗?内置的IMU传感器LSM9DS1包含这些功能! 您可能已经阅读了有关新的Arduino Nano 33系列及其实时和多线程功能的信息。但是,该开发板还有
2021-01-13 16:52:54 5602
5602 
上一期中挑选了国外三家知名的IMU厂商的主流IMU产品进行盘点分析。可以看到,国外主流的IMU厂商都在精度和低耗上下足了功夫,同时都在发力向高端IMU市场进军推出解决方案。这一期我们将视线转回国内,来看看国内MEMS厂商旗下产品。
2021-09-04 08:00:004812 融合IMU成了视觉SLAM方案和激光SLAM方案补足自身导航方案缺点的有效手段。IMU发展至今也将加速度传感器、陀螺仪、磁传感器等MEMS器件集成在一起,以更小的体积、更低的成本来辅助机器运动。本期将挑选机器人应用向性能顶尖的IMU看看它们做到了什么样的层次。
2021-11-17 08:00:003347 广。 MEMS 重要类别——IMU 惯性测量单元一直是MEMS市场里重要的产品类型,主要包括加速度计、陀螺仪和磁力计。如今,由分立的惯性测量单元组合成的三轴、六轴、九轴IMU,将加速度传感器、陀螺仪、磁传感器等MEMS器件集成在一起,以满足生产
2023-08-01 00:08:001007 单元IMU和垂直测量单元VRU产品特点:惯性测量单元垂直陀螺陀螺仪零偏稳定性8°/hr加速度计零偏稳定性0.04mg垂直陀螺仪算法,姿态精度±0.25°集成高精度压力计相比于3DM-GX3-25航姿参考系统,3DM-GX3-15缺少了一个三轴磁力计。姿态角当中的横滚和倾斜精度±0.25,航向没有参考。
2020-12-07 09:05:45
模块(多星座:GPS, GLONASS, BeiDou、Galileo)、陀螺仪、加速度计、磁力计、气压计组成。内置非常先进的自适应扩展卡尔曼滤波器等组成。为用户提供高质量的姿态(欧拉角、四元数和旋转
2020-12-16 14:18:35
MOD MEMS IMU 6AXIS LOW RANGE
2023-03-22 07:29:35
IMU的工作原理是什么?IMU、AHRS、VRU和INS的区别在哪?怎样去搭建一种IMU误差模型?惯性传感器分为哪几种?怎样去选择?
2021-07-13 06:16:20
一、IMU误差来源1.1 轴偏角误差(Axis Misalignments)理想情况下,XYZ三轴相互正交,且加速度计与陀螺仪相互重合,但一般加速度计与陀螺仪分开制造,其坐标系并不重合,且加速度计
2020-12-24 15:56:31
现在需要一款高精度的IMU,包括三轴mems陀螺仪,加速度计,磁力计,希望了解的能给推荐一款最好的
2015-04-20 15:16:30
请问各位大神,如何用公式节点读取陀螺仪数据,陀螺仪型号是6050,谢谢!!!
2017-08-26 10:08:21
陀螺仪原理及应用
2020-04-04 18:24:07
文章目录【实验目的】【实验原理】一、陀螺仪简介二、MPU6050简介【实验环境】硬件设备:软件环境:【实验步骤】第一步 配置工程环境第二步 陀螺仪寄存器读取函数和初始化函数第三步 编写main.c
2021-08-06 06:08:22
陀螺仪的原理 以及怎么调 急求急求啊{:10:}{:10:}{:10:}{:10:}{:10:}{:10:}
2013-07-22 10:10:02
陀螺仪是什么来的?他有什么作用?在全国电设竞赛中有什么例子吗?求各位大伙帮帮忙解释!十分感谢!
2017-07-30 17:06:12
150 mg(相当于8.6°倾斜)的加速度变化,即使其中最好的陀螺仪也会超出其额定零偏稳定性。有些设计师试图利用外部加速度计来补偿g敏感度(通常是在IMU应用中,因为所需的加速度计已经存在),这在某些
2018-10-18 11:34:58
`这陀螺仪和重力传感器有什么区别呢?区别很多,但最大的区别就是重力传感对于空间上的位移感受维较少,能做到6个方向的感应就已经很不错了,而陀螺仪则是全方位的。这很重要,毫不夸张的说,这两者不是一个级别
2020-09-03 07:29:47
的原理。 具体来说,陀螺仪,是一个圆形的中轴的结合体。而事实上,静止与运动的陀螺仪本身并无区别,如果静止的陀螺仪本身绝对平衡的话,抛除外在因素陀螺仪是可以不依靠旋转便能立定的。而如果陀螺仪本身尺寸
2020-12-17 16:31:35
是不一样的。用一个形象的比喻解释了科里奥利力的原理。 具体来说,陀螺仪,是一个圆形的中轴的结合体。而事实上,静止与运动的陀螺仪本身并无区别,如果静止的陀螺仪本身绝对平衡的话,抛除外在因素陀螺仪是可以不依
2020-09-09 08:48:00
最近听大牛的传感器同事的陀螺仪专业讲座,深入浅出的讲解让小编对陀螺仪的原理与应用有种顿悟赶脚,抽空整理部分内容,给对这个技术不太明了的小伙伴们科普下哦~陀螺仪是用来测量角速率的器件,在加速度功能基础上,可以进一步发展,构建陀螺仪。
2019-07-25 06:15:32
`陀螺仪在航天航空中的应用 陀螺仪器最早是用于航海导航,但随着科学技术的发展,它在航空和航天事业中也得到广泛的应用。 陀螺仪器不仅可以作为指示仪表,而更重要的是它可以作为自动控制系统中的一个敏感
2020-09-04 07:52:53
的机器人朝向正确的方向都非常便捷。ADXRS450 陀螺仪板是参赛队伍非常好的一个起步之选,尤其是对不了解机器人陀螺仪的队伍。ADI 提供—— ADIS16448 10自由度IMU板ADIS16448
2018-10-29 17:00:27
说到陀螺仪有什么用,小编只能说,必不可缺吧!尤其是现在的智能终端已经大面积使用,之前因为成本较高,普遍用在飞机、航母及大型运作设备上,就用现在的智能手机来研究下陀螺仪吧,之后还会介绍清楚陀螺仪
2018-11-08 16:14:38
对于角速度传感器,很多人可能会比较陌生,不过,如果说起陀螺仪,大家还是比较熟悉的。陀螺仪,是一种用来测量角速度的装置。根据不同的工作原理,陀螺仪有哪些类型呢?
2019-09-12 09:05:05
要的参数 https://ezchina.analog.com/message/30364#30364 资料六:MEMS IMU/陀螺仪对准基础 https://ezchina.analog.com
2016-01-18 15:31:32
近期由于课题需要购买了型号为ADIS16470的MEMS-IMU产品,尝试使用后得到了数据结果,但有如下问题。
1静态实验下,得到的陀螺仪数据单位若是°/s,则明显量级过大,远大于地球自转
2023-12-28 08:18:21
EVALBOARDFORADIS16IMU4
2023-03-30 12:04:37
陀螺仪开启的时候会有偶发机器静止的时候一抖动不停。我们这边做过实验,将一台重没出现这个问题的机器和一台出现过这种问题机器对调陀螺仪。问题点是跟着陀螺仪走。主控是用的HI3559V200海思有大佬能解决问题吗, 有偿
2022-09-22 16:31:03
简介对于在反馈环路中采用MEMS惯性测量单元(IMU) 的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。对于IMU中的陀螺仪,传感器对准误差描述各陀螺仪的旋转轴与系统定义的"
2018-10-17 10:39:42
简介对于在反馈环路中采用MEMS惯性测量单元(IMU) 的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。对于IMU中的陀螺仪,传感器对准误差描述各陀螺仪的旋转轴与系统定义的"
2019-10-16 08:00:00
Mark Looney应用工程师ADI公司摘要当MEMS惯性测量单元(IMU)用作运动控制系统中的反馈传感器时,必须了解陀螺仪的噪声情况,因为它会在所监视的平台上造成不必要的物理运动。根据具体情况
2018-10-22 16:44:26
Mark Looney应用工程师ADI公司摘要当MEMS惯性测量单元(IMU)用作运动控制系统中的反馈传感器时,必须了解陀螺仪的噪声情况,因为它会在所监视的平台上造成不必要的物理运动。根据具体情况
2018-11-01 11:15:18
嘿,我们正在使用NUCLEO-F401RE板,并期待通过Bosch(BMI 160)连接imu传感器,其中包含陀螺仪+加速度计。我想知道是否有一个传感器融合库用于ST中的这个特定传感器,它可以帮助
2019-04-26 08:13:18
,覆盖基于计算机视觉 (CV) 或LIDAR的解决方案的盲区。这些精确的低噪声器件设计用于机器人应用和无人机。特性• 领先的陀螺仪温度稳定性• 40% lower A/G noise • 50% lower Gyro TC• 50% lower Gyro TC
2020-05-23 00:45:07
mpu6050的陀螺仪采样频率为50hz,低通滤波为20HZ,陀螺仪的输出频率1kHZ或8HZ,为什么陀螺仪的输出频率比采样频率还高
2018-05-16 20:16:22
(旋转)和skopein(看)两字合为gyro scopei一字来命名这种仪表。 那时常听到别人说三轴、六轴、九轴陀螺仪,那其中到底有哪些区别呢?跟小编一起来了解下。 三轴陀螺仪和六轴的区别 轴
2018-11-08 16:12:15
文章目录前言一、陀螺仪传感器陀螺仪:三轴陀螺仪和六轴的区别六轴的区别和九轴陀螺仪的区别二、实验设备1.串口6轴加速度计/陀螺仪MPU6050模块2.USB转TTL 3.3V 5V3.硬件设备准备三
2021-08-06 08:09:57
本帖翻译自IMU(加速度计和陀螺仪设备)在嵌入式应用中使用的指南。这篇文章主要介绍加速度计和陀螺仪的数学模型和基本算法,以及如何融合这两者,侧重算法、思想的讨论
2021-08-06 08:04:17
本帖翻译自IMU(加速度计和陀螺仪设备)在嵌入式应用中使用的指南。这篇文章主要介绍加速度计和陀螺仪的数学模型和基本算法,以及如何融合这两者,侧重算法、思想的讨论介绍本指南旨在向兴趣者介绍惯性MEMS(微机电系统)传感器,特别是加速度计和陀螺仪以及其他整合IMU(惯性测量
2021-08-09 06:46:21
单元(IMU),即囊括了加速计、陀螺仪、压力传感器及磁力计等元件的组合器件。HARPSS处理技术常常被称为MEMS的“CMOS”,它能将高性能三轴微陀螺仪与三轴微加速计,甚至还有三轴磁强计集成在同一
2018-11-12 15:35:11
楼主新人,准备看看三轴的加速度传感器和陀螺仪,然后又看到了MPU-6050(整合了陀螺仪和三轴加速度传感器),想向大家请教一下加速度传感器和陀螺仪的区别,以及MPU-6050与它们之间的区别。看了一些网友们列出来的,感觉不是很懂啊。
2014-03-13 19:10:12
本帖最后由 饼干11 于 2021-8-11 09:44 编辑
我想在一个比较大的平台,分别安装陀螺仪实现这个平台稳定,平台是三个吊轮吊着的,如何让陀螺仪判断哪个吊轮快了或者慢了,然后给单片机指令去控制吊轮,但是平台太大了会不会导致陀螺仪不灵敏,比如人在地球上感觉不到地球自转一样。
2021-08-11 08:32:28
关于高精度陀螺仪有两种方法,一种是民间询问得知误差1°-2°算高精度陀螺仪。 还有一种说法,陀螺仪根本不测量角度,什么误差多少度都不是严谨的说法,陀螺仪的原始数据是角速度,单位弧度每秒,把
2018-11-09 16:05:25
处理器读取陀螺仪加速度计数据后首先需要对数据进行滤波处理,此文分析比较几种常用的滤波算法。IMU: IMU使用MPU9250(即MPU6500),设置加速度量程±8G,陀螺仪±2000dps,数字低
2019-06-11 08:00:00
,是发达国家不可缺少的基本导航定位手段之一,如自动化程度很高的波音飞机都装载有磁导航定位系统。 二、什么是陀螺仪 为了介绍地磁传感器与陀螺仪的区别,此处先对陀螺仪加以简单介绍。 陀螺仪的原理就是,一个
2021-01-20 14:41:13
目标是基于IMU传感器创建精确(尽可能便宜)的倾角仪。它应测量旋转轮的角度变化(速度高达250度/秒),精度为0.01度。我并不是拒绝少数IMU用于获得更好的重新封闭。 我正在寻找标记
2019-02-15 08:41:08
如何使用imu_utils工具生成IMU的Allan方差标定曲线?
2021-11-22 07:23:12
根据陀螺仪的定轴性(inertia or rigidity)和进动性(precession)制成的各种仪表或装置,常见的陀螺仪主要有以下几种: 陀螺罗盘。供航行和飞行物体作方向基准用的寻找并跟踪地理
2020-09-06 07:49:27
陀螺仪(角速率传感器或角速度传感器)是一种可以测量到物体角速度的装置。陀螺仪可以感知旋转运动和方向的变化。角速度不同,运动产生的电位差也不同。陀螺仪将角速度的变化转换成电信号输出。
2020-08-19 06:15:05
要求是做一个能够测绘钢筋三维轨迹的东西,我想着用一个探针或其他东西,沿着钢筋路径走一次,然后记录下该探针的三维轨迹,再在计算机上绘制出该三维轨迹。在网上查到可以使用IMU记录加速度和陀螺仪,然后二次
2019-03-20 09:24:24
电子陀螺仪的三轴,六轴,九轴有什么区别啊
2015-08-05 20:20:15
转换为角度估计的漂移。 任何系统的基本调整空间在于使用此类传感器的根本出发点。 加速度计的长期稳定性更好,但易受振动影响。 陀螺仪不易受振动影响,但长期稳定性较差,会导致估算更快地漂移。 IMU
2019-01-04 10:23:47
最近在一直研究四轴的一些东西,不过听到学长说四轴用IMU算法比较好,所以我想问一下IMU 和AHRS算法用stm32如何实现呢?他们的区别是什么?哪个更好一些呢???求各位i解答!!
2019-04-19 06:36:22
陀螺仪检测有和缺陷?
2021-10-12 12:55:23
MEMS陀螺仪是如何工作的?
2021-03-18 06:48:50
开启时间为0.1秒或100毫秒,对应的误差小于0.001度。各类IMU产品的区别在哪里工业级MEMS技术是相对消费级器件而言的,前者成本更高,但远低于传统光纤或环形激光陀螺仪技术。 这里将从消费级市场
2018-11-01 11:18:23
EPSON/爱普生新推出的M-G370等系列惯性测量单元(IMU)是一种核心参数达到光纤陀螺仪级别的高精度MEMS三轴陀螺仪/六轴陀螺仪,集成了3个单轴角速度传感器和3个单轴加速度传感器,用以同时
2022-11-24 16:17:56
无刷云台IMU原理图,采用ADXRS623单轴陀螺仪,简单实用。
2016-01-11 15:56:28 34
34 对于在反馈环路中采用MEMS惯性测量单元(IMU)的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。
2016-11-05 03:56:253578 
AMU30由带有三轴加速度计、三轴陀螺仪、三轴磁力计、压力传感器和复杂AHRS算法的10自由度IMU组成。
2019-06-24 11:28:226280 惯性测量单元Inertial measurement unit,简称IMU,是测量物体三轴姿态角(或角速率)及加速度的装置。陀螺仪和加速度计,是惯性导航系统的核心装置。借助内置的加速度传感器和陀螺仪,IMU可测量来自三个方向的线性加速度和旋转角速率,通过解算可获得载体的姿态、速度和位移等信息。
2019-10-04 17:12:0010522 ,以及MEMS惯性传感器,将是未来发展的重点。惯性测量单元简称IMU,是测量物体三轴姿态角(角速率)及加速度的装置。陀螺仪和加速度计,是惯性导航系统的核心装置。借助内置的加速度传感器和陀螺仪,IMU可测量来自三个方向的线性加速度和旋转角速率
2020-06-11 11:00:131752 ,以及MEMS惯性传感器,将是未来发展的重点。惯性测量单元简称IMU,是测量物体三轴姿态角(角速率)及加速度的装置。陀螺仪和加速度计,是惯性导航系统的核心装置。借助内置的加速度传感器和陀螺仪,IMU可测量来自三个方向的线性加速度和旋转角速率
2020-06-01 11:22:016930 如何区别INS和IMU的区别呢? 通过测量飞行器的加速度,并自动进行积分运算获得飞行器瞬时速度和瞬时位置数据的技术。组成惯性导航系统的设备都安装在运载体内,工作时不依赖外界信息也不向外界辐射能量不易
2020-04-16 16:39:322342 IMU和AHRS之间的区别 AHRS航姿参考系统 航姿参考系统包括基于MEMS的三轴陀螺仪,加速度计和磁强计。航姿参考系统与惯性测量单元IMU的区别在于,航姿参考系统(AHRS)包含了嵌入式的姿态
2020-04-20 11:02:132029 IMU惯性测量单元是什么? 惯性测量单元是测量物体三轴姿态角(或角速率)以及加速度的装置。一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度
2020-04-20 10:32:576231 IMU和INS的区别 位置定位和姿态测量除了全球GPS定位这个系统,还有就是惯导系统。 这里简单介绍一下关于惯导的一些进本原理和所用的地方以及imu与ins的区别。 惯性导航通过测量飞行器的加速度
2020-05-18 16:51:155324 IMU惯性测量单元介绍 惯性测量单元的工作原理是:使用一个或多个加速度感应器,探测当前的加速度速率;使用一个或多个偏航陀螺仪,检测在方向、翻滚角度和倾斜姿态上的变化。有一些惯性测量单元还同时包括
2020-06-08 14:29:334054 IMU与AHRS系统的具体区别 无人机的姿态解算一般有两种算法,一种是IMU,另一种是被各种无人机广泛使用的AHRS,他们之间有什么区别和联系呢? AHRS俗称航姿参考系统, AHRS由加速度计
2020-06-01 10:57:042406 IMU惯性测量单元详解 惯性测量单元的工作原理。惯性测量单元的工作原理是:使用一个或多个加速度感应器,探测当前的加速度速率;使用一个或多个偏航陀螺仪,检测在方向、翻滚角度和倾斜姿态上的变化。有一些
2020-06-01 10:37:199178 刚开始的时候我总是搞不清楚AHRS和IMU的区别,不知道这有什么区别。后来慢慢的慢慢的,我理解了AHRS俗称航姿参考系统是由加速度计,磁场计,陀螺仪构成,AHRS的真正参考来自于地球的重力场和地球
2020-06-01 10:29:431926 IMU和AHRS分别代表什么 刚开始的时候我总是搞不清楚AHRS和IMU的区别,不知道这有什么区别。后来慢慢的慢慢的,我理解了AHRS俗称航姿参考系统是由加速度计,磁场计,陀螺仪构成,AHRS的真正
2020-06-08 14:50:342446 倾角传感器和IMU的区别 (IMU)学名惯性测量单元,所有的运动都可以分解为一个直线运动和一个旋转运动,故这个惯性测量单元就是测量这两种运动,直线运动通过加速度计可以测量,旋转运动则通过陀螺。我假设
2020-06-15 10:39:453121 飞控是由主控MCU和惯性测量模块(IMU,Inertial Measurement Unit)组成。IMU提供飞行器在空间姿态的传感器原始数据,一般由陀螺仪传感器/加速度传感器/电子罗盘提供飞行器9DOF数据。
2020-08-03 10:54:503193 
IMU:Inertial Measurement Unit,即惯性测量单元。它是由三轴加速计、三轴陀螺仪、三轴磁力计等多种传感器组成的模块。 IMU在无人驾驶汽车、无人机上面应用的比较多,包括手机
2020-12-26 10:14:0912400 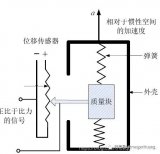
常被朋友们问起 到底啥是陀螺仪模块,IMU模块,惯导模块。这里以我的理解给大家一个通俗的解释: 说明:以下说法是为了不改变原意的情况下方便快速理解的比较通俗的解释,不是正式定义。 6轴,9轴,IMU
2021-06-23 16:55:0114603 电子发烧友网报道(文/李宁远)上一期中挑选了国外三家知名的IMU厂商的主流IMU产品进行盘点分析。可以看到,国外主流的IMU厂商都在精度和低耗上下足了功夫,同时都在发力向高端IMU市场进军推出
2021-09-06 10:16:534291 在原型阶段,Fizoptika陀螺仪的基于光纤陀螺的惯性测量模块融合了三个相似VG1703的陀螺仪、三个MEMS加速度传感器和一个处理板,具备基本上立即初始化和极低的功能损耗 Fizoptika
2021-11-17 16:27:10333 IMU通常包含一个3轴加速度计和一个3轴的陀螺仪,是测量物体三轴姿态角(或角度率)以及加速度的装置。
2022-11-11 14:46:532789 传感器未对准通常是在其反馈回路中使用MEMS惯性测量单元(IMU)的高性能运动控制系统的关键考虑因素。对于IMU中的陀螺仪,传感器未对准描述了每个陀螺仪的旋转轴与系统定义的惯性参考系(也称为全局系)之间的角度差。
2023-01-08 20:05:193511 
IMU:Inertial Measurement Unit,即惯性测量单元。它是由三轴加速计、三轴陀螺仪、三轴磁力计等多种传感器组成的模块。
IMU在无人驾驶汽车、无人机上面应用的比较多,包括手机等很多电子设备也有IMU传感器的存在。
2023-03-02 10:34:342975 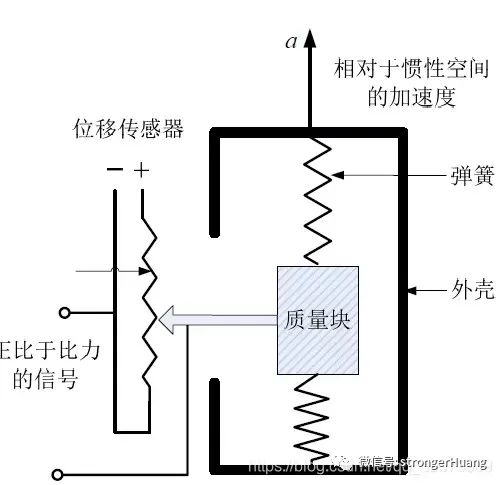
到,IMU-TK 这个开源工具是基于此论文为理论依据开发的。IMU-TK 这个工具用来标定确定性误差(系统误差),是一个基于C++的开源IMU数据处理库,用于处理惯性测量单元(IMU)数据,包括加速度计、陀螺仪和磁力计等传感器。该库提供了一组API,可以用于读取IMU数据、进行校准、等操作。
2023-05-24 17:28:59827 
AHRS和IMU的测量元件基本上相同,但由于AHRS的参考系统不同,AHRS相比IMU要多出个磁力计。在AHRS进行运动轨迹和状态监测时,由于陀螺仪时漂的问题,在对运动过程中的旋转角度进行积分时,会随着时间推移而误差越来越大,因此,需要磁力计及时对运动的地理方位角度进行校准。
2022-03-24 14:48:33812 
IMU原理惯性测量单元(IMU)通常指由3个加速度计和3个陀螺仪组成的组合单元,加速度计和陀螺仪安装在互相垂直的测量轴上。低精度的IMU可以通过其他方式修正,GPS用于修正位置的长期漂移,气压计用于
2021-09-17 17:30:551449 
围绕航向姿态参考系统(英文简称AHRS)和惯性测量单元(英文简称IMU),来介绍一下,AHRS和IMU的在利用加速度传感器、陀螺仪、磁力计等传感器进行惯性测量等方面的联系与区别,以及它们各自的适用领域。
2022-02-15 16:35:201239 
陀螺仪和加速度计是IMU的主要部件,其精度直接影响惯性系统的精度。在实际工作中,由于各种不可避免的干扰因素,陀螺仪和加速度计会产生误差。从初始对准开始,其导航误差随着时间的推移而增大,尤其是位置误差
2023-07-14 13:45:421994 陀螺仪角度漂移是指在使用陀螺仪时,由于各种误差和不完美的因素导致测量的角度随时间发生偏移。为了解决陀螺仪角度漂移问题,可以考虑以下几种方法。
2023-08-21 14:40:374035 惯性测量单元(英语:Inertialmeasurementunit,简称IMU)是测量物体三轴姿态角(或角速率)以及加速度的装置。一般的,一个IMU内会装有三轴的陀螺仪和三个方向的加速度计,来测量
2023-11-04 08:30:18184 
陀螺仪是一种用于测量物体旋转的装置,尤其在航空航天领域和导航应用中得到广泛应用。陀螺仪根据其测量的轴数可以分为三轴陀螺仪和六轴陀螺仪。在本文中,我们将详细讨论三轴陀螺仪和六轴陀螺仪的区别。 首先
2024-01-02 14:22:101180
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论