 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
机器人简介
紫外线杀菌机器人(UV Robot)是一种配备有紫外线系统的遥控机器人。该系统包含一个移动的机器人车辆和一个地面站控制器(GCS)。操作员可以使用地面站控制器 (GCS) 的操纵杆控制机器人,同时观察机器人的摄像头。
该机器人可以通过紫外线分解其DNA结构,对环境中的疾病、病毒、细菌和其他类型的有害有机微生物进行消毒和杀灭。目前,多个国家已经成功测试了这些机器人,对他们的医院、公共交通工具、办公场所和其他公共场所进行了消毒。我们以具有成本效益的方式实施了这种紫外线机器人,将消毒过程扩展到公共场所。
为什么不用消毒液?
对公共场所进行消毒最常见和流行的方法是喷洒消毒液,这种消毒液是 70% 的酒精基液体。近日,世界卫生组织(WHO)宣布,在公共场所经常使用消毒液确实有害。由于其强烈的气味,这可能会导致呼吸系统出现问题,引起皮肤刺激,并可能导致环境失衡。
此外,这种方法每天都会产生巨大的材料和劳动力成本。
UV机器人的优势
- 一次性费用(无需补充酒精或氯液)。
- 可用于消毒表面、医疗服、医用口罩和其他医疗设备。
- 与基于液体的消毒方法相比,可将消毒时间缩短 60%。(在有织物材料的环境中使用时,干燥时间相当长)。
- 能够用于带有电子设备的环境。
- 一个操作员可以覆盖大面积。(不需要像液体喷雾那样多人)
- 我们与当地一所大学的微生物实验室合作,测试并证明了这款机器人的消毒率达到了 99.997% 。(在上一节中解释)
紫外线杀菌辐照(UVGI)
紫外线杀菌辐射 (UVGI) 是一种消毒方法,它使用短波长紫外线(紫外线 C 或 UVC)光通过破坏核酸和破坏其 DNA 来杀死或灭活微生物,使它们无法执行重要的细胞功能。UVC 被 RNA 和 DNA 碱基吸收,可导致两个相邻的嘧啶光化学融合成共价连接的二聚体,然后成为非配对碱基。
UVGI 用于多种应用,例如食品、空气和水的净化。UVGI 可用于预防某些传染病的传播。低压汞 (Hg) 放电灯和 LED 常用于 UVGI 应用,并发射短波紫外线 C(100-280 纳米)辐射,主要波长为 254 纳米。
每种类型的微生物都需要不同剂量的紫外线来使其功能失活。考虑到 Covid-19 的情况,此处考虑使用紫外线灭活同一病毒。在大多数研究论文和文章中,研究小组以“焦耳每平方米”或“焦耳每平方厘米”的形式提到了灭菌过程所需的紫外线。但在考虑紫外线灯的参数和规格时,制造商给出了距离为 1 米的“每平方厘米微瓦特(uW)”的紫外线强度。
单位“瓦特(W)”表示在一秒内发射的能量。每平方厘米微瓦代表一秒钟内通过一平方厘米面积的能量。
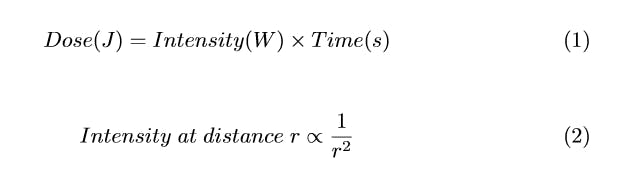
等式1显示了剂量和强度之间的关系。得出的结论是,不同的剂量可以通过改变对同一紫外光源的曝光时间来实现。
紫外线强度与距离之间的关系如公式2所示。据此可以得出结论,紫外线强度随着距离光源的距离而降低。
根据维基百科,8mJ 的剂量可以灭活大多数病毒。
了解机器人的功能
整个系统有点复杂,因为我们添加了一些功能和安全特性以符合行业标准。在解释实现过程之前,最好先了解一下系统是如何工作的。
该机器人有 3 个主要部件。
1.地面车辆
这部分由两个由直流齿轮电机驱动的轮子(差动驱动机器人)驱动。前后有两个脚轮,以保持平衡。我们已将电子控制系统和电池放置在地面车辆内,这是一个 12V 35Ah 铅酸电池。
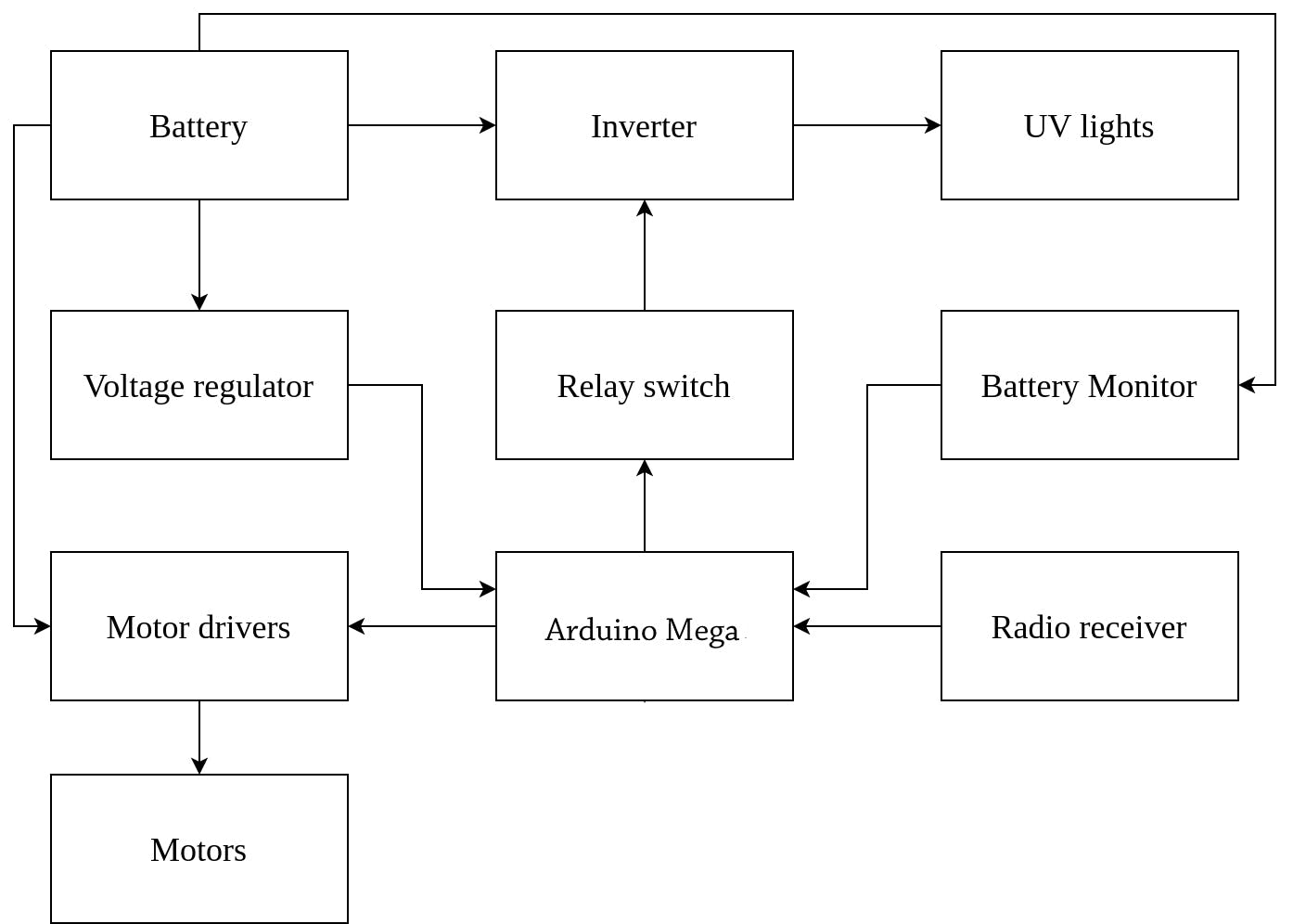
Arduino Mega 通过稳压模块由主电池供电,将电压从 12V 降低到 5V。带有 PWM 输出的四通道 RC 无线电接收器连接到 Mega 板。电机通过连接到 Arduino 板的双通道 H 桥电机驱动器驱动。逆变器连接在紫外线灯和电池之间,并使用连接到 Arduino 板的继电器开关进行控制。
2.紫外灯塔
我们使用了荧光紫外线灯泡,需要单独的电子镇流器单元来为灯泡供电。灯塔包含 6 个紫外线灯泡,这些灯泡放置在一个铝制圆柱体周围,该铝制圆柱体是由铝板通过滚动制成的。这个铝制圆柱体充当紫外线的反射器。
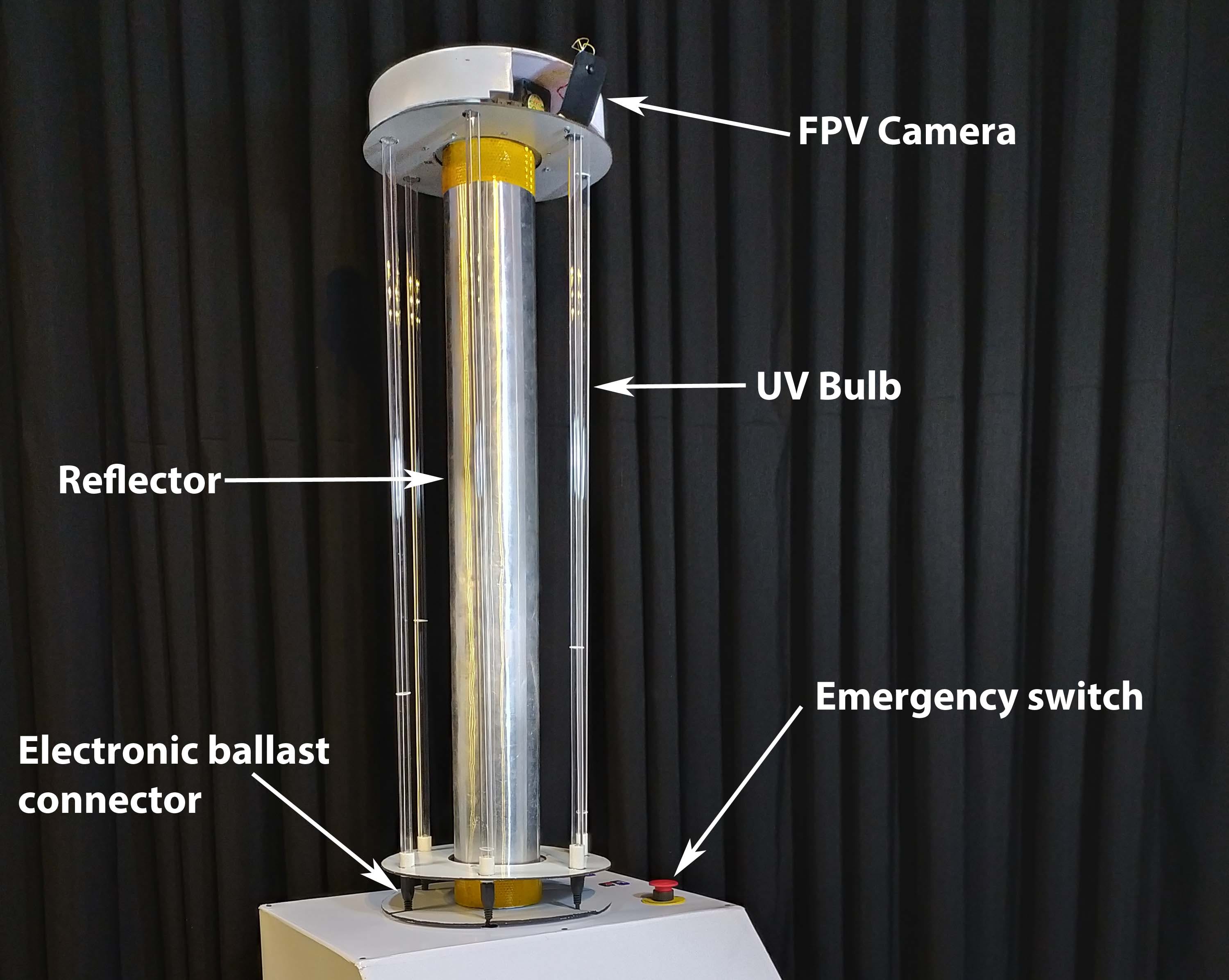
所有电子镇流器都放置在铝筒内。在塔顶,有一个 FPV 摄像头和一个 FPV 发射器,用于将视频馈送到 GCS。紫外线塔固定在地面车辆的顶部。
3.地面站控制器

这是机器人的遥控器。屏幕显示从机器人收到的摄像头反馈。操纵杆用于移动机器人。紫外线灯可以使用紫外线开关打开和关闭。布防开关用作安全开关。它在打开时会减少所有功能。
开启紫外线灯

对于我们的机器人,我们选择了 6 个具有以下规格的紫外线灯泡。
- 功率 - 55w
- 波长 - 254nm
- 长度 - 890mm
- 管径 - 15mm
- 类型 - 单端 4 针
这些不是严格的规格,除了波长。电子镇流器单元连接到紫外线灯泡的 4 个引脚。为电子镇流器供电时,紫外线灯泡会亮起。
***UV Light is harmful to human skin and eyes. Do not expose your eyes and skin for a longer period. Observing the light through glass is the safest procedure as UV light cannot penetrate transparent glass.***
FPV 视频系统
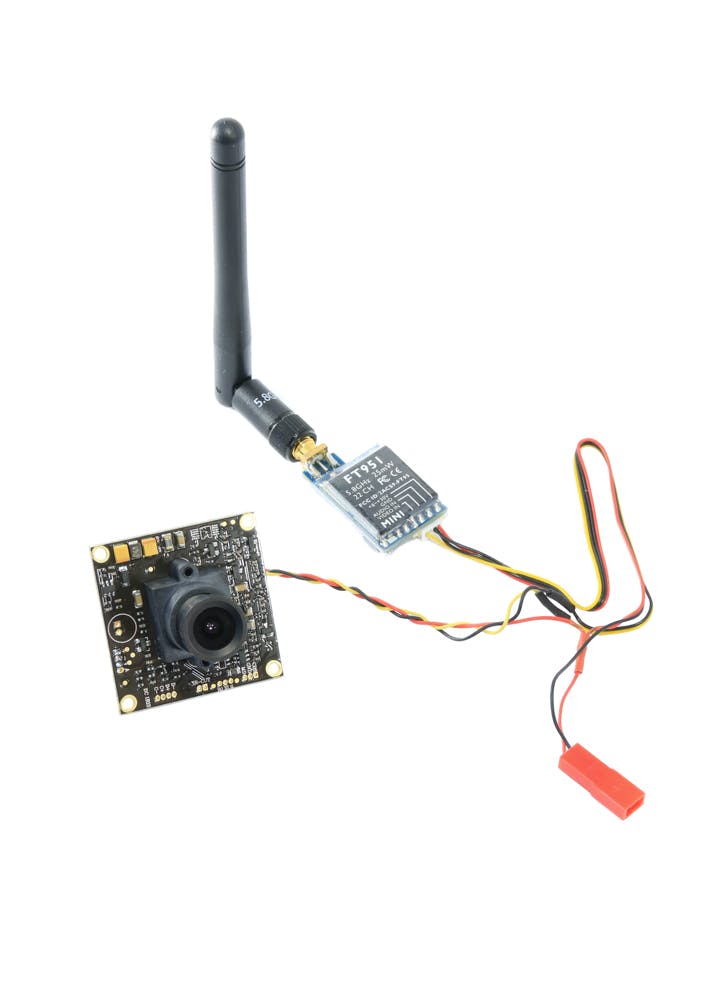
FPV视频系统主要用于无人机获得鸟瞰图。在我们的案例中,使用 FPV 系统可以轻松地从机器人获取视频,无需任何编程或焊接组件。该机器人有一个摄像头和一个视频发射器。我们只需将电源连接到该系统,它就会开始使用 5.8GHz 传输视频。
GCS 具有内置 5.8GHz 视频接收器的 LCD 屏幕。启动屏幕后,它将开始显示相机馈送。
建造地面车辆
主体结构由 0.75' 钢箱条制成。以下是用于我们机器人的设计,但不限于此。根据您的要求更改设计。
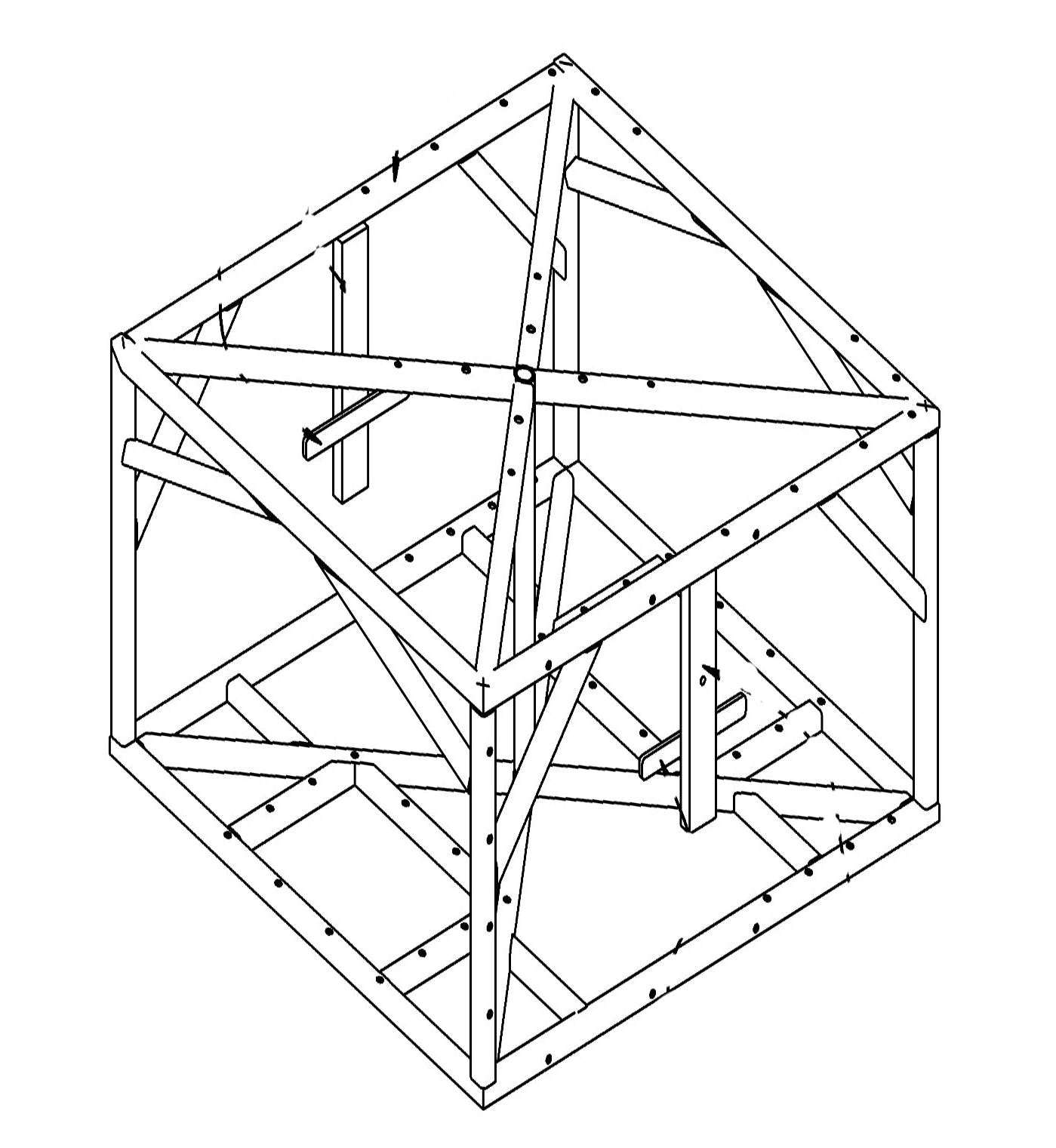
框架应该有空间和一个在底部安装两个电机和两个脚轮的机构。在结构内部,应该有一个锁定铅酸电池的机构。在我们的机器人中,我们使用覆层板覆盖框架。
两个电机的线连接到电机驱动器的输出引脚。这个过程可以很容易地在互联网上找到,因此它并不打算描述整个过程。
最后附上电控系统示意图。RC 接收器的通道 1 - 通道 4 PWM 信号引脚从引脚 18 - 21 连接到 Arduino 板。每个通道在代码中按以下方式配置。你可以随心所欲地改变它。
- Ch 1 - 紫外线开关
- Ch 2 - 机器人布防开关
- Ch 3 - 前进/后退移动命令
- 第 4 章 - 左/右转向命令
这也可以在构建 GCS 时进行更改。
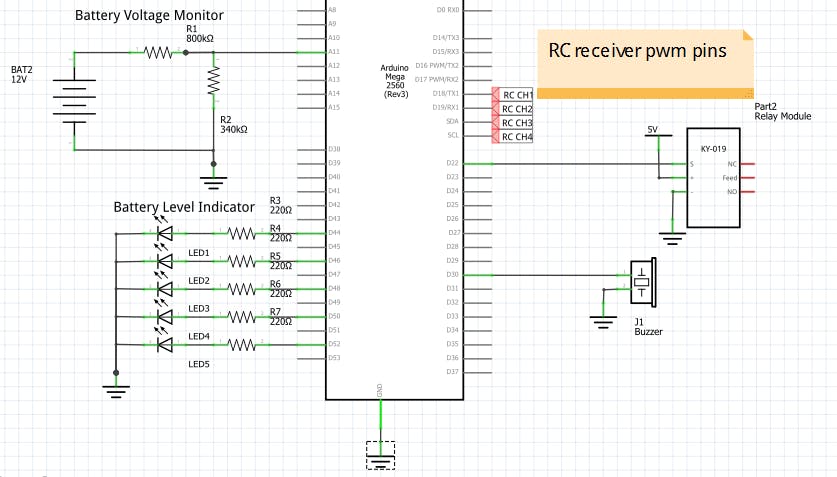
电机驱动器的引脚连接到 Arduino 引脚 3-11,如图所示。
要将 12v 转换为 AC 230V 为紫外线灯供电,此处使用了逆变器电路。我们购买了带有内置充电器的市售逆变器单元。通过允许我们使用现有电源点为铅酸电池充电,这有助于避免电子系统的复杂性。
在我们的案例中,我们使用了改进的正弦波逆变器,其效率约为 70%。要以 70% 的效率为所有电子镇流器供电,所需的逆变器功率为 470W。有了所有的安全余量,我们购买了一台 1kW 的逆变器。
电池端子连接到 12V 输入,E. 镇流器连接到交流输出端口。开/关开关被移除。开关中有 3 根线可用;公共线、地线和电源线。这 3 根线以下列方式连接到继电器开关,以控制来自 Arduino 板的紫外线灯。
- 普通线 -> 普通
- 地线 -> NC
- 接通电源 -> 否
我们包括一个系统电源开关、紫外线电源开关和一个紧急切断开关,以使机器人符合工业标准。
建造紫外线灯塔
塔的中间部分包含一块铝板。将片材卷成直径为 15cm 的圆柱体。圆柱体顶部和底部分别放置两块直径为30cm的圆形覆层板。这些用作紫外线灯座。两块覆层板都钻有 19 毫米的孔以适应紫外线。电子镇流器使用双面胶带固定在铝筒内。
FPV 摄像系统安装在塔顶,两根电线通过圆柱体引至底部。
建造地面控制站
以下是地面控制站 (GCS) 所需的组件。
Rc 发射器包含 2 个操纵杆和几个开关。在这里,我们的兴趣只在于一个操纵杆、电路和 LED 指示灯。拆下发射器的外壳,观察电路如何感知操纵杆。每个操纵杆包含两个连接到电路板的电位器。根据操纵杆的位置,电位器改变它的电阻,以便电路可以读取操纵杆的位置。
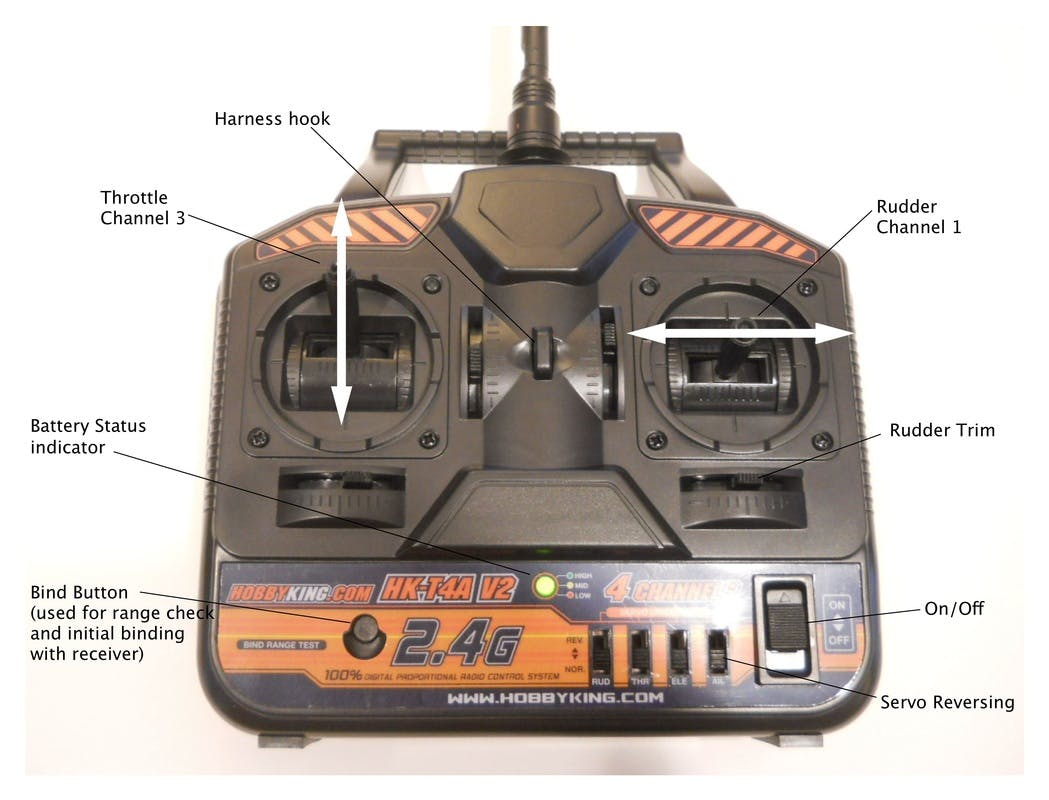
拆下一个操纵杆和它的两个电位器。将各自的电线末端焊接到两个拨动开关上。现在我们有一个操纵杆和两个拨动开关来控制所有 4 个通道。一个开关用作机器人布防开关,另一个用作紫外线灯控制开关。LED 指示灯可用作 GCS 的电池监视器,因为它在电池电量不足时将其颜色变为红色。
现在我们需要为发射器和 FPV 屏幕制作电源。18650电池的电池电压为3.7V。充满电后变为4.2V。为此,我们将 3 节电池串联起来以获得大约 12V 的电压。在我们的案例中,我们使用了容量为 1000mAh 的电池。为了增加GCS的运行时间,我们使用了9节电池,3节串联电池组并联得到3000mAh容量。然后连接BMS模块以保护电池。
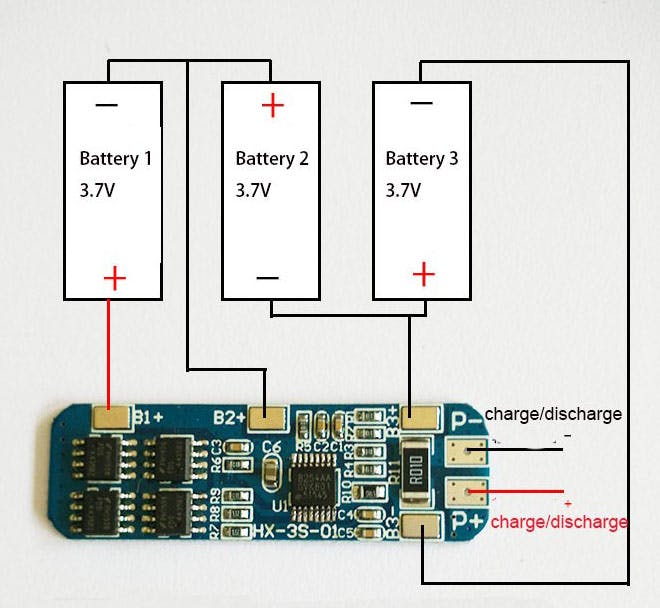
P+ 和 P- 连接到 Transmitter 电源输入和 FPV 屏幕电源输入。12V 开关模式电源 (SMPS) 带有一个电位器,用于在有限范围内调节输出电压。将其设置为 12.8 并将电压输出连接到 BMS 的 P+ 和 P-。这将有助于在插入 SMPS 时为电池组充电。
您可以根据自己的喜好为此设计一个外壳。
编码
代码的第一个任务是读取 RC 通道输入。由于我们使用的是 PWM 接收器,因此我使用中断来读取 PWM 值。为了方便起见,我包含了一个 PWM 库,以通过以下方式定义连接的引脚来使用中断。
PWM ch1(18); // Setup pin 18 for input
PWM ch2(19); // Setup pin 19 for input
PWM ch3(20); // Setup pin 20 for input
PWM ch4(21); // Setup pin 21 for input
在启动序列中,代码检查电池电压以及 UV 开关是否打开。如果它检测到其中任何一个,启动过程将在那里等待,直到所有问题都修复。
//check battery voltage
battery_voltage_monitor();
while(batterylow == true){
battery_voltage_monitor();
low_battery_notification();
}
//verify the uv swtich is turned off
rc_read();
while(uv_pwm > switch_on_pwm){
rc_read();
uv_on_warning_at_startup(); //buzzer tone
}
运行电机时,电池电压仅在那一刻急剧下降。为了避免每次移动机器人时触发低电压警报,电池监控部分仅在机器人不移动时运行。
if (robot_moving == false){
battery_voltage_monitor(); //monitor the battery when robot is not moving
}
所有其他功能,包括控制电机驱动器、使用蜂鸣器产生音调和控制继电器都以通常的方式工作。如果您不了解这些主题,您可以遵循有关上述主题的一般教程。
运营流程
上电程序
GCS 控制器
1. 打开主开关。
2. 确保机器人布防开关和紫外线灯开关均已关闭。(在向下位置)。
机器人
1. 打开电源开关。
2. 等待启动音。
3. 等待系统提示音。
控制机器人
1. 打开机器人布防开关。
2. 移动操纵杆移动机器人。
3. 打开紫外线开关,打开紫外线灯。当机器人布防开关处于关闭位置时,UV 开关不起作用。
电池电量指示器
1. 确保电池至少有 4 格闪烁以操作机器人。
2. 电池电量低时,蜂鸣器发出哔哔声,电池电量指示灯的最后两格闪烁。
充电程序
1. 关闭机器人。
2. 关闭 GCS。
3. 将逆变器插入电源插座。(通常逆变器有一个内置的充电电平指示器)
一般注意事项
1. 在人多的地方使用
紫外线对人的眼睛和皮肤有害。短距离(小于 3m)暴露在光线下超过 60 秒会伤害眼睛并可能导致皮肤刺激。然而,紫外线束不能穿透任何固体介质。透过透明玻璃看紫外线不会影响人的眼睛或身体。
2、敏感材料与器件
软塑料对紫外线高度敏感。软塑料通常用于玩具和食品包装。因此,该设备不能在玩具店、超市和有上述物品的地方使用。但是,紫外线灯可用于对上述区域的地板进行消毒。
3.在医院使用的能力
在医院环境中,紫外线有助于在很短的时间内对高接触表面进行消毒。但是在这种情况下应该考虑紫外线对医疗设备和药物的有效性。
带有塑料外壳的医疗设备是由硬塑料制成的,因为它们在制造过程中会经过辐射处理。此外,对于储存在医院的药物,紫外线的有效性没有经过证实的影响。
此外,所有不锈钢医疗设备和 N95 口罩都可以使用同一设备进行消毒。
4. 阴影区域的有效性
紫外线与可见光一样从表面反射。因此,没有得到直射紫外光的区域会得到反射的紫外光。但是,严重覆盖或阴影区域无法获得有效的紫外线。这些区域也没有使用基于消毒液的方法进行消毒。
5. 其他注意事项
在封闭环境中长时间工作时,紫外线会产生臭氧。作为一般做法,所有封闭环境在紫外线灯消毒后通风20分钟。
- 电晕消毒紫外线机器人开源分享 0次下载
- 消毒机器人Hanth-x1开源分享 0次下载
- Pinaka:UVD(紫外线消毒)机器人开源分享 0次下载
- XentrinoBot UVR2(紫外线机器人)开源 0次下载
- UV-C消毒机器人开源分享 1次下载
- 防紫外线机器人开源分享 0次下载
- 紫外线消毒机器人 2次下载
- 消毒机器人开源项目 2次下载
- Roboboi智能紫外线消毒机器人 1次下载
- 紫外线机器人开源分享 0次下载
- Amabie消毒机器人开源分享 2次下载
- 自主UVC消毒机器人开源 2次下载
- 智能紫外线计(紫外线辐射监测)开源分享 0次下载
- 瞳步消毒机器人方案
- 紫外线杀菌消毒灯管专用照度计UVC254说明书 2次下载
- 用于紫外线杀菌灯的电子镇流电路分享 7214次阅读
- 详谈智能手表/手环里的紫外线传感器的作用 4528次阅读
- 紫外线对三大类材料的降解原理及如何预防或减轻紫外线的降解 1.1w次阅读
- 面对疫情 医疗机器人能帮上什么忙? 2022次阅读
- dfrobotGUVA-S10GD UV紫外线传感器简介 1731次阅读
- 紫外线杀菌消毒的原理以及在消毒器中的应用 1703次阅读
- 紫外线传感器在皮肤医疗领域中的应用 658次阅读
- 紫外线传感器在杀菌领域的应用 1381次阅读
- 紫外线传感器在火焰检测中的应用 4893次阅读
- 紫外线和红外线感测暴露监测功能方法 3287次阅读
- 紫外线传感器杀菌消毒原理解析 3570次阅读
- 紫外线杀菌灯杀菌原理和特点 5w次阅读
- 数字式紫外线传感器产品说明和应用 1256次阅读
- 针对紫外线的四个波段,应用对应波段的紫外线传感器分析 5403次阅读
- 紫外线治疗仪与紫外线波段之间的关系解析 4880次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论