 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
概述
大多数漫游车自主机器人需要的一项功能是线路跟踪。该项目的目的是构建一个线跟随机器人,并以一种有趣的方式开始学习 PID 控制器。
部分
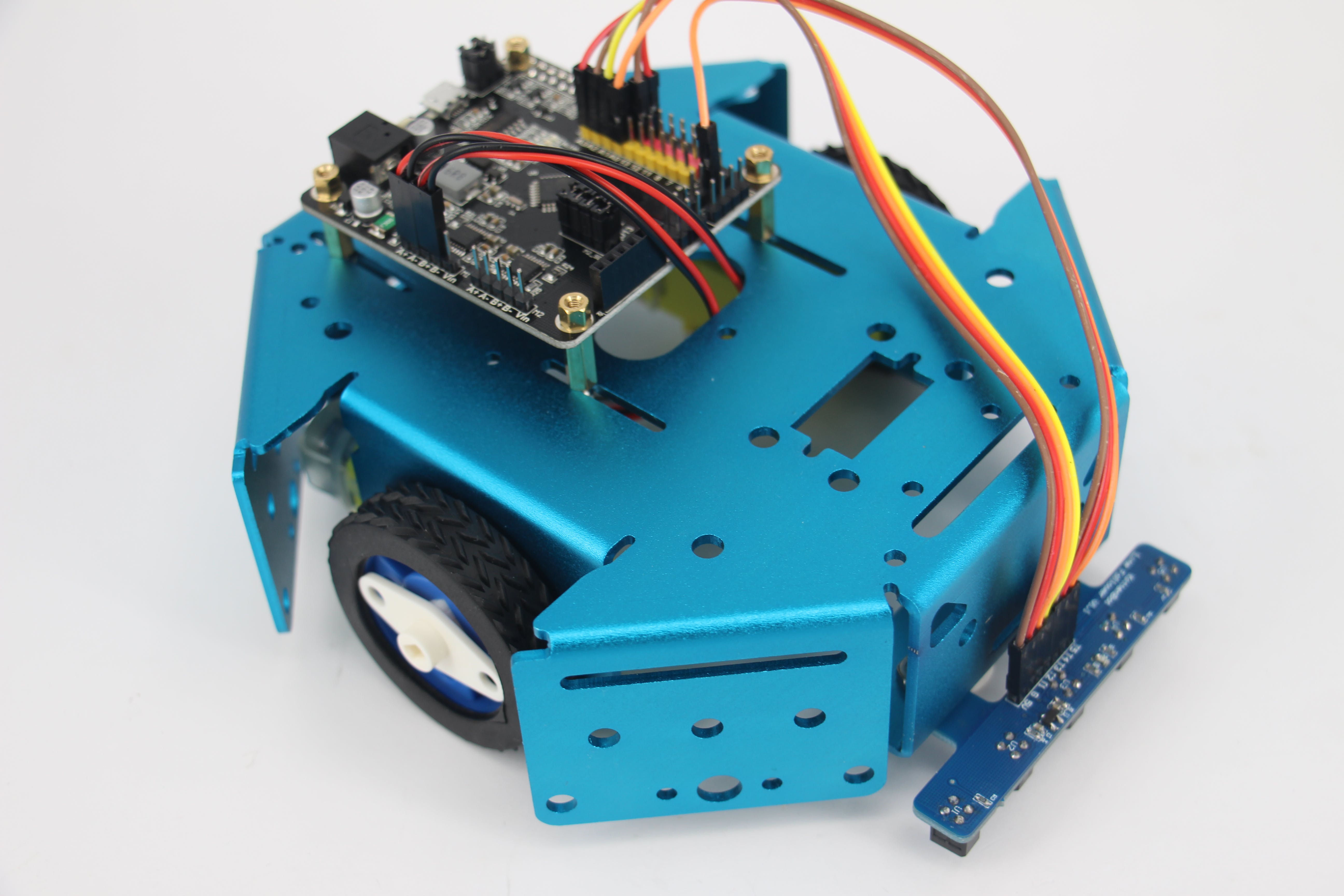
机器人与两个电机、Rosbot 底板和一个 5 通道传感器一起正常工作。与其他产品不同,您不必购买额外的 H 桥电机驱动器或各种组件,因为 Rosbot 基板具有内置的 2x H 桥双驱动器。只需将电机连接到 Rosbot 基板,它将提供比 Arduino Uno 更多的电力。
- 机器人框架: KittenBot 阳极氧化铝底盘
酷酷且坚固的底盘,带有大量安装孔(4.8 毫米乐高机械组),您绝对可以将此底盘重复用于其他有趣的项目。
- 机器人的大脑:RosBot 底板
一个基于 Arduino UNO 的主板,带有 2 个板载双 H 桥电机驱动器。
- 机器人的眼睛: 5 通道 IR 线跟随跟踪器传感器
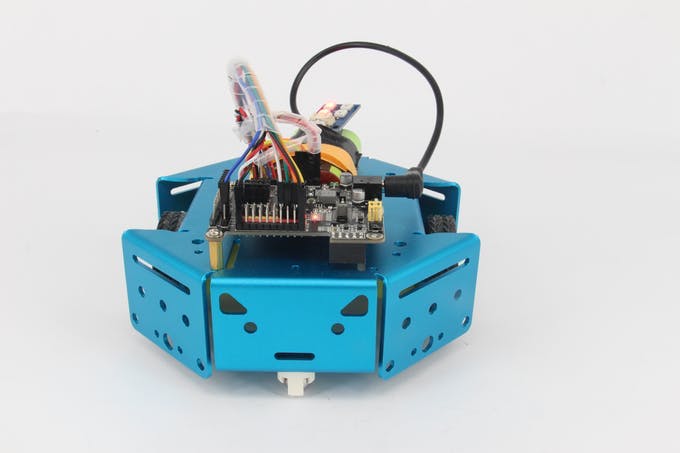
第 1 步:组装
这个机器人很容易组装,按照说明操作,大约需要 15 分钟。
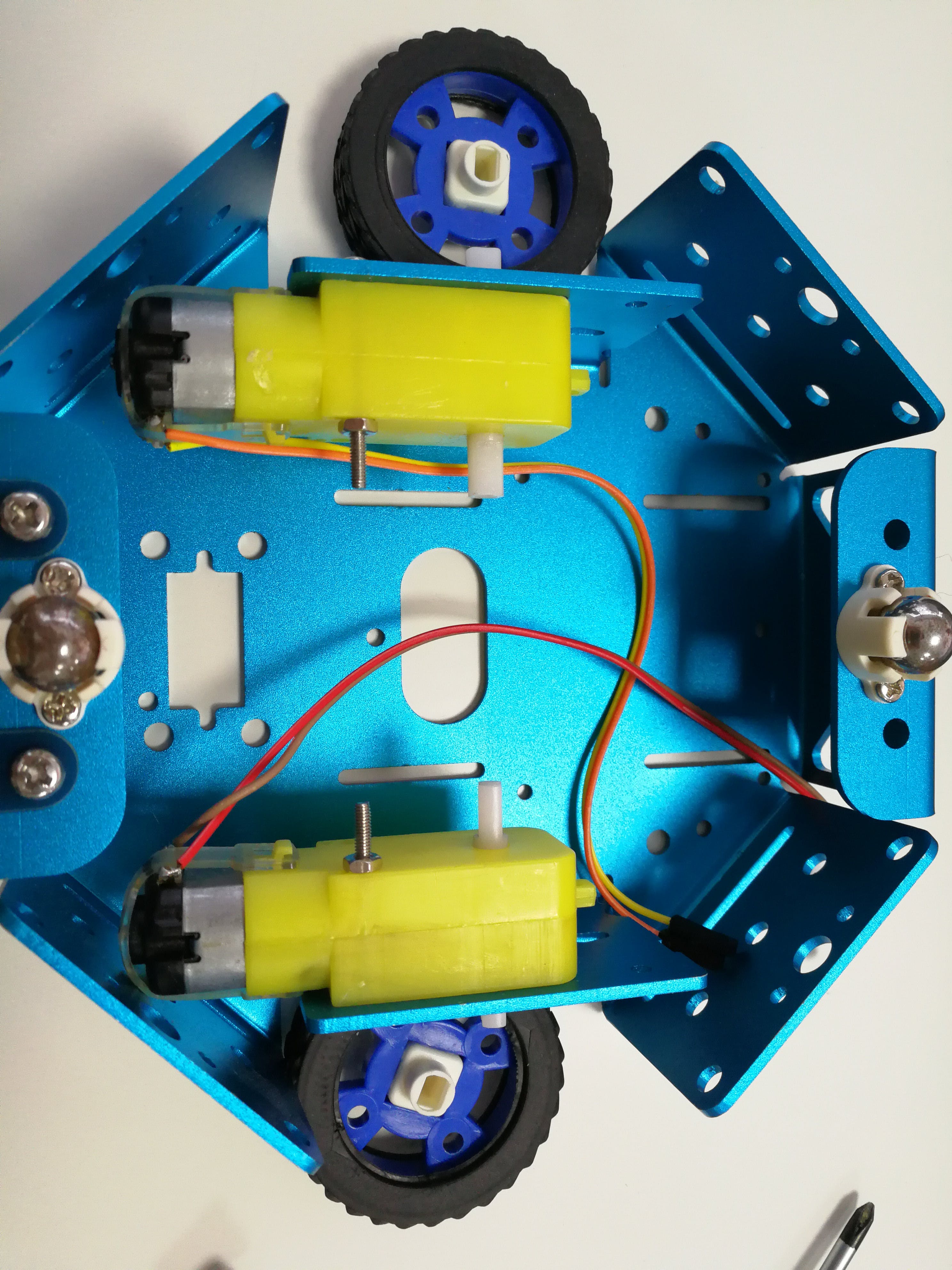
首先,将电机连接到底盘的侧面,只需插入橡胶轮即可。
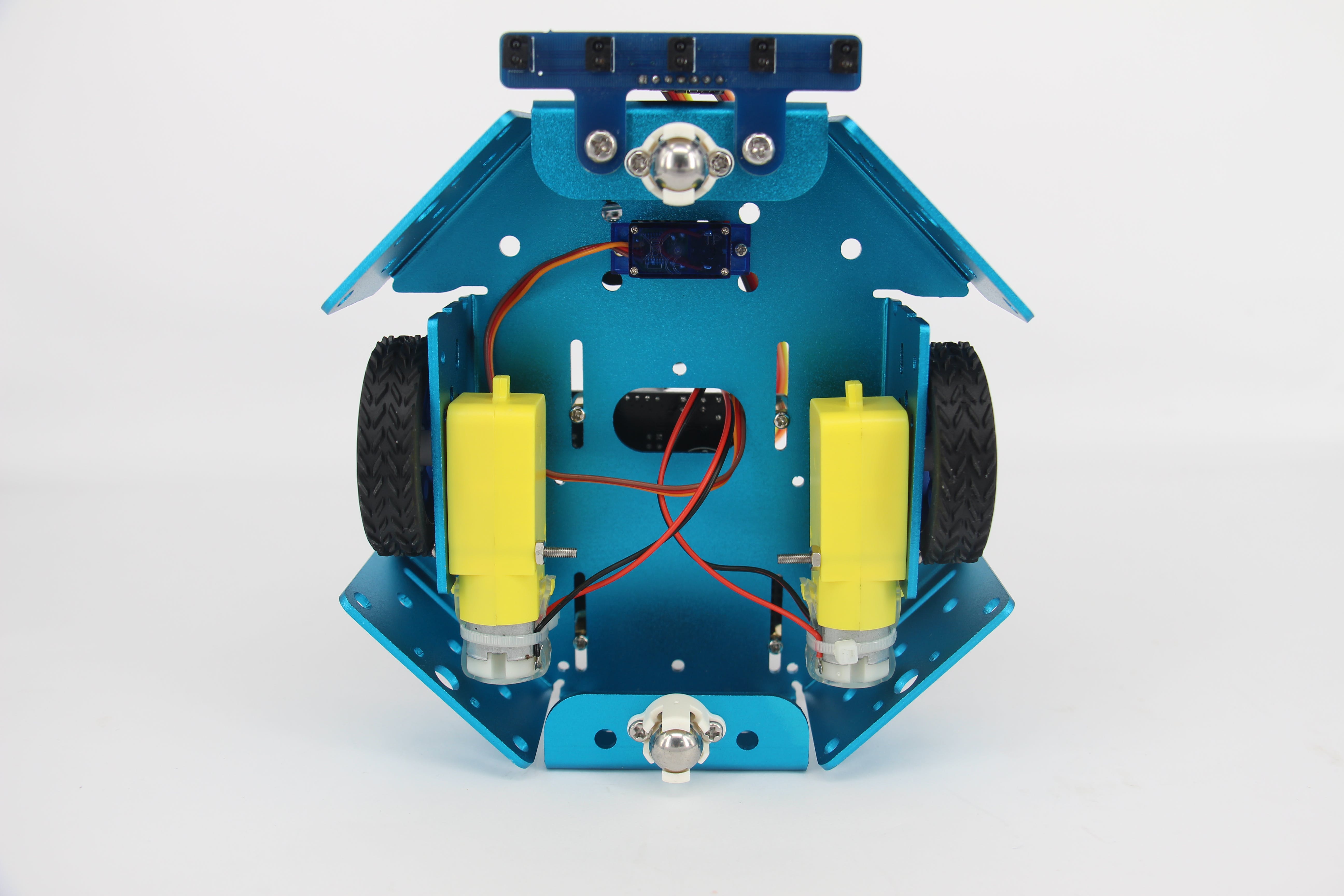
将 5 通道红外传感器安装到机箱前部。
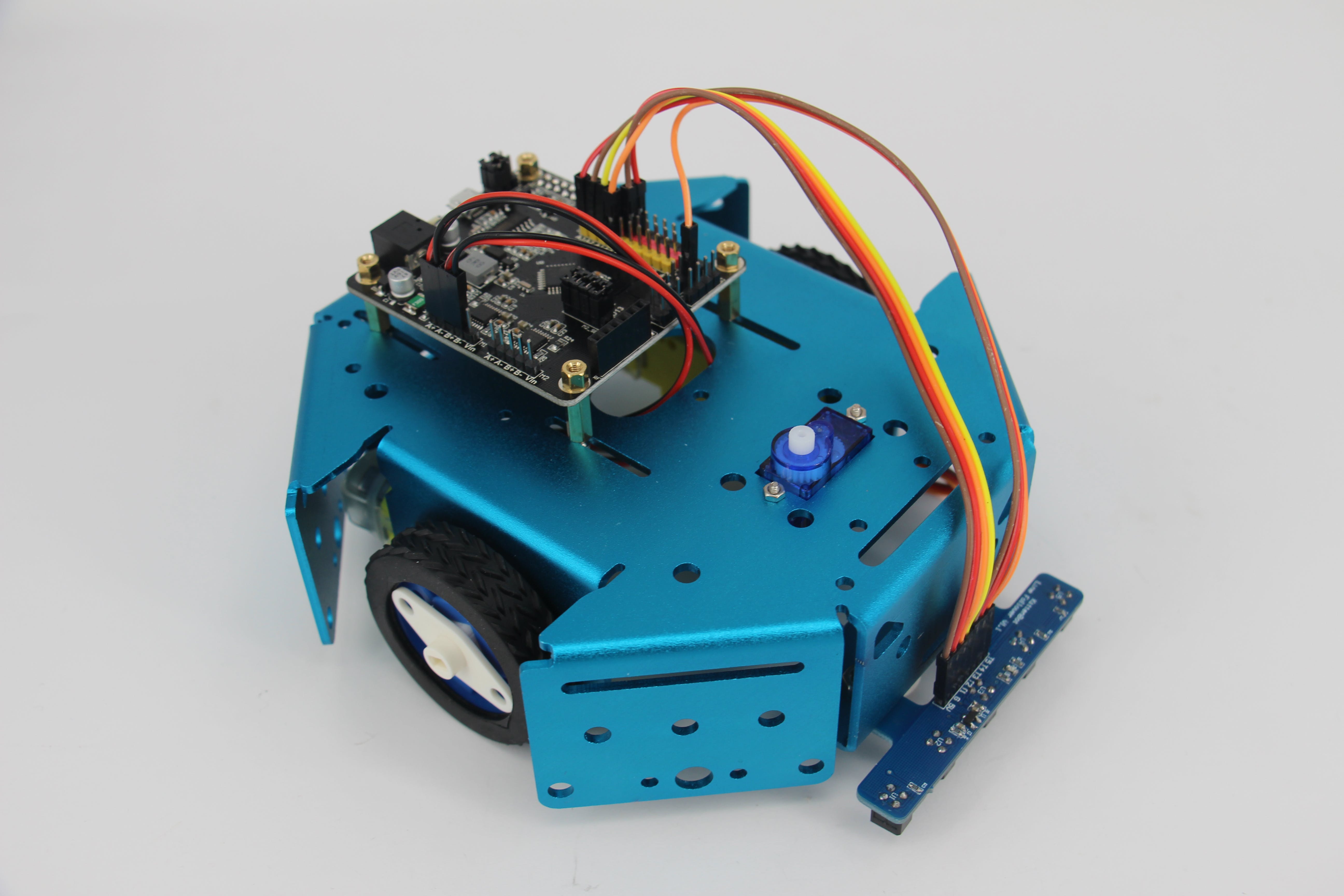
将您的 Rosbot 底板连接到底盘上,然后机器人就可以开始接线了。
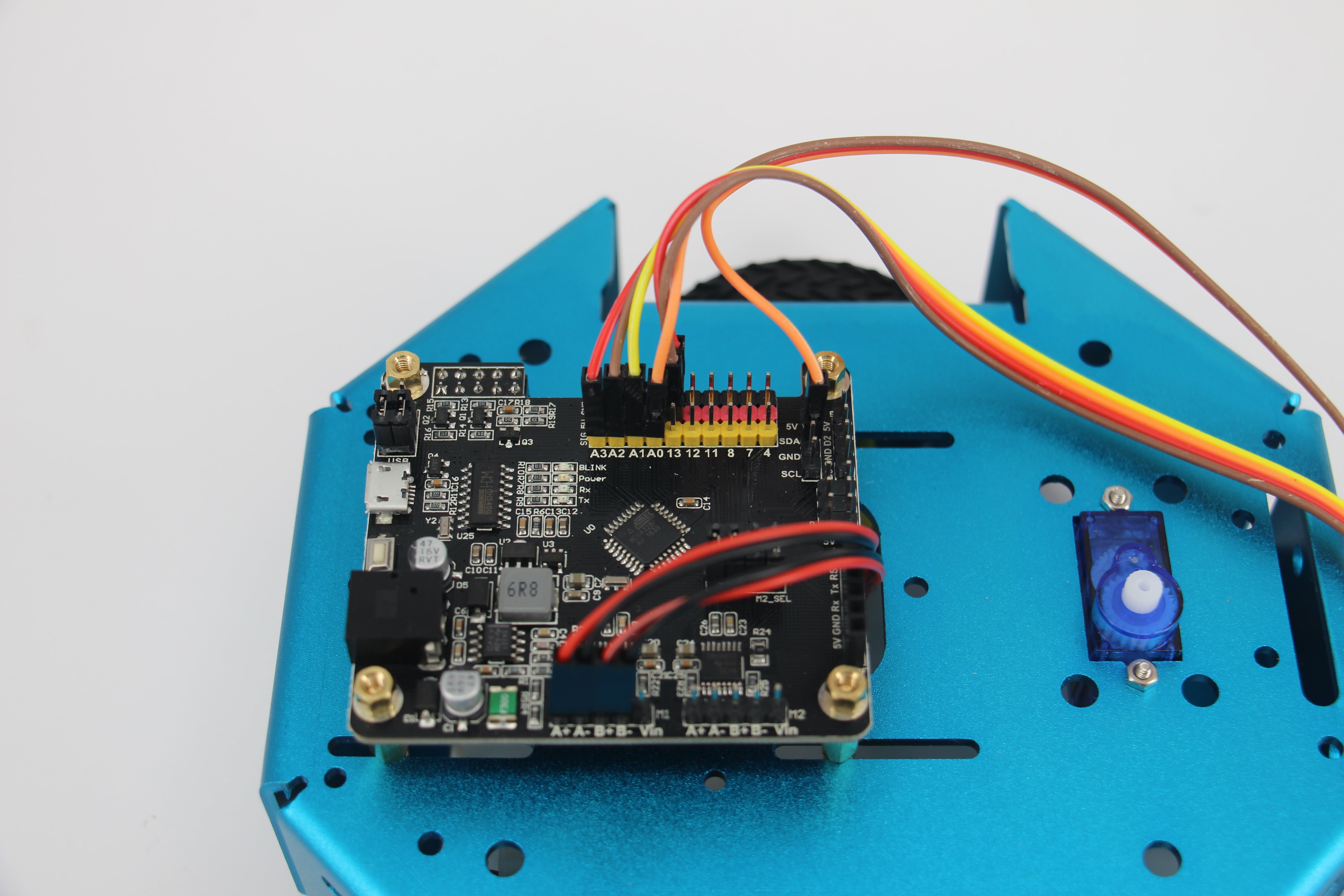
第2步:拧
以下是 5 通道红外传感器的连接:
- VCC 至 5V
- GND 到 RosBot 的 GND
- T1-T4 到引脚 A0-A3
- T5 到 SDA 引脚
直流电机只需连接到引脚 A+A- 和引脚 B+B-。
编码
在代码中,我们有一个状态机来指示每个可能的传感器阵列输出。机器人根据传感器阵列输出向某个方向移动。
void stateMachine(int a) {
switch (a) {
case B00000:
outlineCnt++;
break;
case B11111:
outlineCnt++;
break;
case B00010:
case B00110:
outlineCnt = 0;
pixels.setPixelColor(2, pixels.Color(0, 50, 0));
bias = 1;
break;
case B00001:
case B00011:
outlineCnt = 0;
pixels.setPixelColor(2, pixels.Color(0, 200, 0));
bias = 2;
break;
case B00100:
outlineCnt = 0;
pixels.setPixelColor(2, pixels.Color(0, 0, 20));
bias = 0;
break;
case B01000:
case B01100:
outlineCnt = 0;
pixels.setPixelColor(2, pixels.Color(50, 0, 0));
bias = -1;
break;
case B10000:
case B11000:
outlineCnt = 0;
pixels.setPixelColor(2, pixels.Color(200, 0, 0));
bias = -2;
break;
default:
Serial.println(a,BIN);
outlineCnt++;
break;
}
我们已经设置了误差、比例项、积分项和导数项的值。
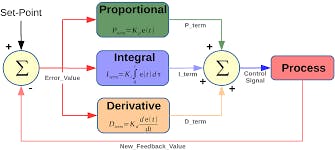
PID控制器
float Kp = 25;
float Ki = 0.15;
float Kd = 1200;
float error, errorLast, erroInte;
float calcPid(float input) {
float errorDiff;
float output;
error = error * 0.7 + input * 0.3; // filter
//error = input;
errorDiff = error - errorLast;
erroInte = constrain(erroInte + error, -50, 50);
output = Kp * error + Ki * erroInte + Kd * errorDiff;
Serial.print(error); Serial.print(' ');
Serial.print(erroInte); Serial.print(' ');
Serial.print(errorDiff); Serial.print(' ');
Serial.println(output);
errorLast = error;
return output;
操纵值以找到最适合您的机器人的值。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 使用OpenCV的车道跟随机器人 0次下载
- DIY简单的线跟随机器人 0次下载
- 障碍物检测和颜色跟随机器人的创建 0次下载
- 基于Arduino Nano的PID线路跟随机器人 2次下载
- 基于PID的线跟随机器人 3次下载
- 线跟随机器人开源硬件 0次下载
- 使用TI RSLK MAX构建声音跟随机器人 0次下载
- 使用Pico的线跟随机器人 0次下载
- 如何制作Arduino人类跟随机器人 0次下载
- 带有PID控制的线跟随机器人 1次下载
- 最简单的线跟随机器人 0次下载
- 物体跟随机器人开源分享 0次下载
- 如何使用Arduino制作跟随机器人 0次下载
- 人类跟随机器人开源分享 1次下载
- 线跟随机器人开源项目 3次下载
- 什么是pid控制,其控制作用是什么 541次阅读
- 一个简单的线路跟随器机器人电路 1391次阅读
- 基于ATmega16构建的线跟随机器人的完整电路图 1462次阅读
- 基于使用Arduino板及电机驱动器对机器人进行编程介绍 3412次阅读
- 详解简单的电机控制线路 2884次阅读
- 机器人控制系统分类_机器人控制系统有哪些 2.4w次阅读
- 机器人控制器有哪些类型_机器人控制器发展 1w次阅读
- 智能跟随系统应用领域和功能介绍 5025次阅读
- 关于工业机器人智能控制的四种控制方式 5781次阅读
- 一文详解PID控制 8922次阅读
- 如何使用S7-200的PID控制功能 6105次阅读
- 基于PLC的机器人伺服运动控制系统设计详解 1.4w次阅读
- pid控制器的输入输出_PID控制器的控制实现 2.5w次阅读
- 没有示教器,还能控制机器人吗? 1w次阅读
- 使用GForce-200PLCCPU222进行PID回路控制的原理与调试 2088次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论