 一个简单的线路跟随器机器人电路
一个简单的线路跟随器机器人电路

本文介绍了一个简单的线路跟随器机器人电路,也称为线路跟踪器车辆,仅使用IC LM324的几个运算放大器和其他一些组件,而无需使用复杂的Arduino或微控制器。
什么是从线机器人车
从线机器人车辆是自动导引车(AGV)的一种形式,它通过检测绘制或嵌入地面的白线来运行。来自探测器的信号命令电动车轮根据线路自动转动和调整,给人一种车辆正在跟随线路的印象。因此,名称行追随者。
基本上,探测器的形式是光敏电阻,如LDR,半导体光探测器,如光电二极管或光电晶体管。
使用几个这样的光检测器来检测来自白线的反射光并切换晶体管电路或基于运算放大器的比较器,后者反过来控制机器人车辆的轮毂电机根据地面上白线的转弯和曲线进行操纵。
使用窗口比较器
在建议的线路跟随器机器人车辆电路中,我们使用几个运算放大器比较器将电机接合到平衡行为中。
运算放大器被装配为窗口组件。顾名思义,窗口比较器将来自检波器的输入信号与构成“窗口”阈值的两个极端基准电压进行比较。只要输入信号电平在此“窗口”基准阈值内,两个运算放大器的输出就在其输出端保持高逻辑。
但是,如果输入信号趋于超过基准阈值,则相关运算放大器输出变为低电平,导致运算放大器的输出相反。这种不平衡促使输出设备通过适当切换负载来纠正这种情况。
电路的工作原理
参考下面的线路跟随器机器人车辆的电路图,我们可以看到IC LM324的两个运算放大器配置为窗口组件。
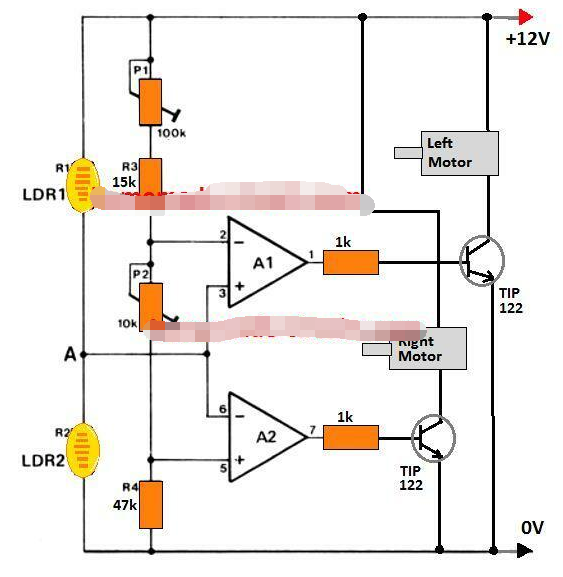
运算放大器可以来自 IC LM358 或 LM324
运算放大器上限连接以控制阈值上限,而下限运算放大器连接以控制阈值下限。
运算放大器A1的反相输入和运算放大器A2的同相输入用固定基准电压箝位
运算放大器A1的同相输入和运算放大器A2的反相输入连接在一起,用于检测光检测器输入信号的变化。
两个光相关电阻器LDR1和LDR2的作用类似于光敏器件,它们被定位为光检测器,使得它们均匀地接收来自白线的反射光。
只要LDR上的光足够高且均匀,A1的引脚3仍然高于其引脚2,因为LDR1与正线相连。这会导致其输出变高。
同样,由于LDR2与地线的连接,A2的引脚6低于其引脚5,这使得A2的输出保持高电平。
换言之,当LDR均匀点亮时,两个运算放大器的同相(+)输入都高于其反相(-)输入,从而导致其输出变为高电平。
当两个输出都为高电平时,晶体管驱动器保持各自的电机均匀运行,从而相应地允许车辆在直线上平稳运行。
机器人车辆如何跟随生产线
当遇到弯曲的白线时,其中一个LDR偏离线,导致电路A点的光差。这随后导致相关运算放大器输出变低,相关电机瞬间停止。
在这种情况下,仍在运行的另一侧电机迫使机器人车辆转向线的弯曲角度,从而使阴影LDR回到白线的照明区域。当这种情况发生时,两个电机再次开始运行,使机器人车辆能够正常运行。
上述自动ON/OFF切换横跨左/右电机,以响应弯曲白线的光线变化,迫使机器人车辆根据白线不断调整和操纵。
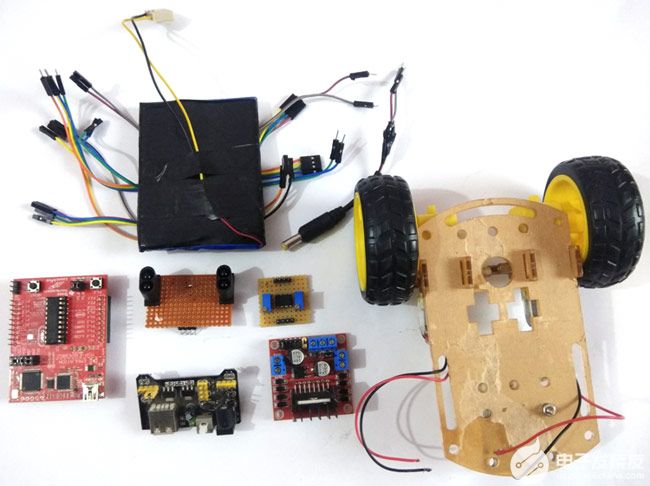
如何制造机器人车辆
在我之前的一篇文章中,我们学习了如何使用连接到矩形板后边缘的几个电机和板前边缘的一对假轮来构建一个简单的遥控车辆。
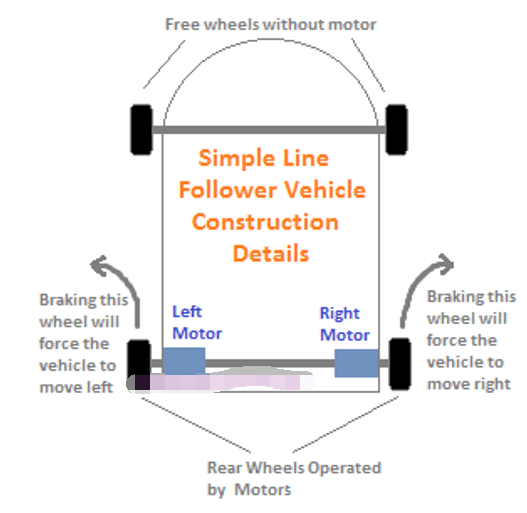
对于提议的线路跟随机器人电路,我们也为车辆采用了类似的结构,如上图所示。
布置看起来非常简单,后轮连接有电机,电机由运算放大器输出端的晶体管驱动器控制。
当机器人车辆偏离线路时,LDR上的光照水平差异会关闭其中一个运算放大器,从而停止相关电机。
这迫使正在运转的对面电机转向停止电机的一侧,这意味着如果左侧电机制动,机器人车辆将被迫向左转,调整到弯曲线,方向相同。
这也表明,应适当地完成与运算放大器输出的左/右电机集成,以使线路的弯曲方向和正在停止的电机位于车辆的同一侧。
如何定位 LDR
由于两个LDR(LDR1和LDR2)应该均匀地感测来自白线的反射光,因此它们的方向应垂直于线的长度,如下所示。
在这里,我们假设机器人车辆从右到左运行,沿着同一路径上的既定路线运行。
LDR 的总宽度应在线的宽度范围内。
LDR 和 LED 应安装在车辆的底面,最好安装在后侧,就在后轮组的下方。
指示的 LED 是带有串联 1K 电阻器的白色 LED。它必须靠近LDR并位于中心,确保来自LDR的光不会直接到达LDR,而是光线应通过其下方白线的反射到达LDR。
电机规格
电机可以是任何永磁有刷类型,但应配备变速箱,以确保车辆的运动适当缓慢和稳定。
电机的额定功率应根据机器人车辆应承载的负载而定。这可以通过一些实际实验来测试。
如何设置
要设置此线路跟随机器人车辆电路,您必须在平坦的表面上绘制一小条白线,或在平坦的表面上粘贴一条白色胶带。
如上图所示,将系统(不带轮子)放置在线路上,以便在线路宽度内正确调整 LDR 和 LED。
打开电源,白色 LED 应明亮地照亮其下方的区域。调整两个预设,直到两个电机同时打开。
现在稍微向右移动设备,使 LDR1 移出白线。
左侧电机应停止。如果没有,则调整 P1,直到左侧电机停止。
接下来,将设备稍微向左移动,使 LDR2 移出白线。这应该会停止右侧电机。如果没有,则调整 10k 预设,直到右侧电机停止。
这将完成设置程序,现在您可以将车轮安装在电机上,并使用此导引车自动跟随地面上铺设的轨道。
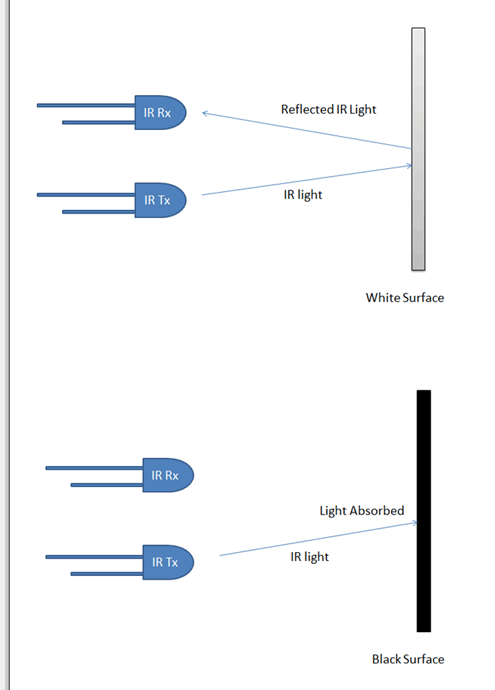
白线与黑线
所提出的线路从动器系统基于嵌入地面的白线,而不是黑线。使用白线代替黑线的优点如下:
与黑线相比,白线看起来更优雅和体面。
基于白线的从动器即使在完全黑暗或昏暗的环境光线下也可以工作。基于黑光的设计通常需要外部照明来保持车辆运行。
无论瓷砖颜色如何,基于白线的AGV都能更准确地工作,除了非常白或等同于白线颜色的瓷砖。
将车辆转换为黑线跟随器
尽管有上述优点,如果用户更喜欢机器人车辆遵循黑线,那么系统可以通过对所提出的设计进行一些快速修改来轻松转换。
用户只需将运算放大器的输入引脚连接与预设互换或交换,并移除与LDR相关的LED。
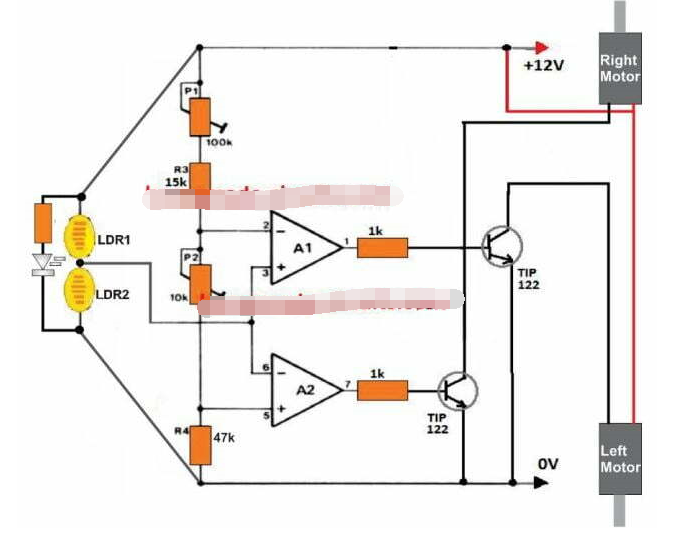
另一个简单的线路跟随器电路
运算放大器U1a触发器将其输出从正电平变为负极,反之亦然,以响应两个LDR上不断变化的光照水平。
该响应由U1b运算放大器放大,并馈送到驱动器运算放大器U1c、U1d。
当落在LDR1(R1)上的线路反射的光很高时,U1c、U1d的同相输入获得正信号,这导致其输出变为正信号。
来自其输出的正值导致Q1打开,因为它是NPN,并且这会打开连接的继电器,这反过来又导致继电器K1上的相关电机关闭,以便车辆可以暂时扭转自身并纠正其方向,直到LDR上接收到均匀的光。
另一方面,如果发生相反的情况,即如果LDR2(R2)由于车辆迷失方向或可能是由于线路本身形成曲线而从地面获得更多光线,则会导致负电压在U1c和U1d的同相输入端提供,其输出现在变为负值。
负逻辑现在由PNP晶体管响应,但NPN晶体管保持无偏置且不导通。
PNP 继电器传导并停止相关的连接电机,以确保车辆自行扭转并校正方向,直到两个 LDR 上的光线相等。
另一个白线跟随器电路(转向控制)
用于检查白线的传感器是使用几个光相关电阻(LOR)构建的,这些电阻器针对线的两侧,以确保每个LDR都能看到地面的一半白色半暗部分。白线通过灯泡点亮,以确保LDR具有相对较低的电阻。
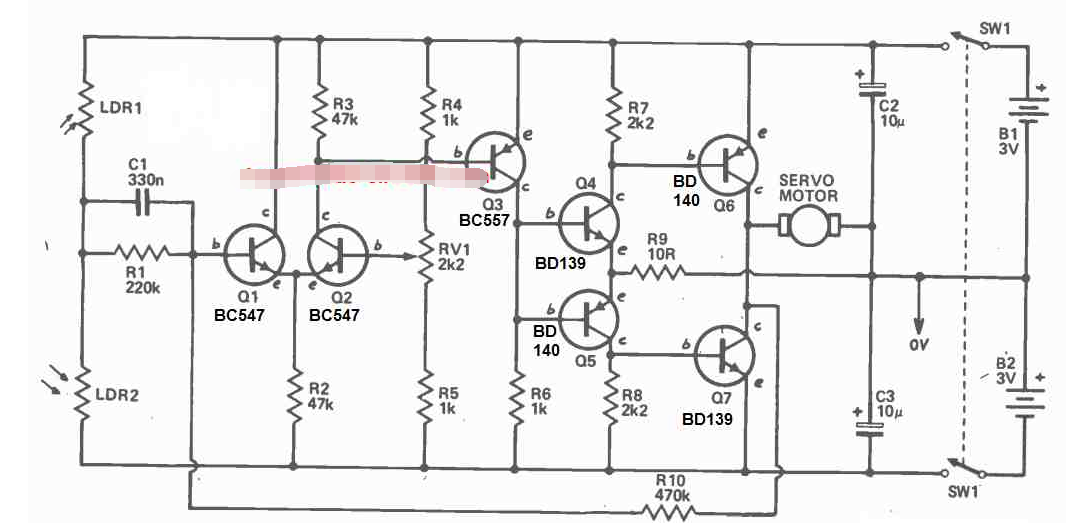
如果汽车或车辆偏离中心线,其中一个LDR将出现更高百分比的“白色”,导致其阻力成比例下降。由于两个LDR在电源电压上串联连接,这意味着LDR结处的电压将随着车辆行驶而变化,同时沿着扭曲的白线行驶。
通过晶体管Q1和Q2将此变化电压与预设RVI的设置进行比较。由此产生的误差信号相应地调整伺服电机的旋转方向,试图补偿误差,确保机器人车辆自我调整并正确遵循白色轨道。
电阻R10提供负反馈,以最小化“开环增益”,而动态反馈由电容C1提供,电容C1的位置用于减少过冲。
请记住,上图所示的伺服电机应该配置有车辆的转机构,以便电机适当调整转向,以保持车辆正确聚焦在白线上。
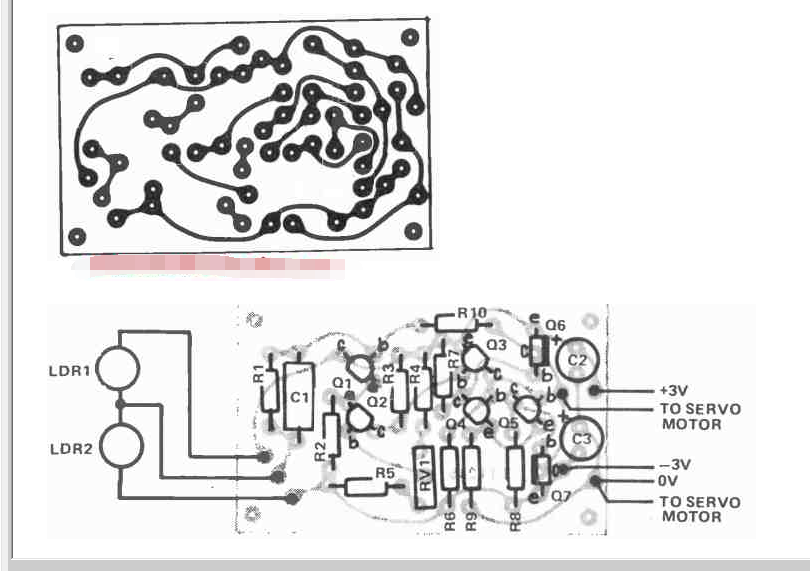
印刷电路板设计
-
机器人
+关注
关注
213文章
30580浏览量
219496 -
跟随器
+关注
关注
1文章
86浏览量
30415 -
机器人电路图
+关注
关注
0文章
2浏览量
5970
发布评论请先 登录
如何使用AVR单片机构建一个线跟随机器人
智能高尔夫机器人
避障机器人电路设计解决方案
【HarmonyOS IPC 试用连载 】智能跟随机器人
怎样去设计一个基于arduino的简单记忆机器人
制作一个带有PID控制器的线跟随机器人







 工商网监
工商网监
评论