 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
传统的机器人运动控制器大部分是以嵌入式单片机为核心的,但其运算速度和处理能力远不能满足机器人控制系统飞速发展的需要,日益成为阻碍机器人技术进步的瓶颈。随着以电子计算机和数字电子技术为代表的现代高技术的不断发展,尤其是高速度数字信号处理器DSP 的出现,从根本上解决了嵌入式系统运算能力不足的问题,并为机器人运动控制系统的改进提供了新的途径。该文正是从这一点出发, 选用控制能力很强的DSP芯片TMS320LF2407A作为机器人运动控制器的主处理器,设计出一种高性能机器人运动控制器,显著地提高了整个机器人的运动性能。
1 控制系统结构
机器人的各种运动由各个关节轴系完成,机器人控制本质上是对各关节轴系的控制。每个轴系具有一个自由度,可以完成某一方向的转动任务,所有轴系同时协调运动就可以完成相对复杂的动作。国防科技大学机电工程与自动化学院机器人教研室最新研制的仿人步行机器人,其内部各关节结构如图1所示。
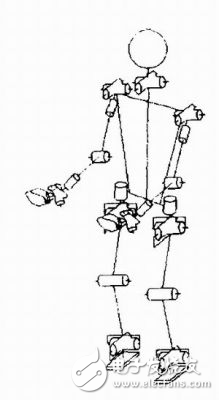
图1 机器人内部结构示意图
此机器人共有36 个自由度,分布在下肢、上肢、头部和手指等各关节。所有轴系均由PWM 脉冲信号驱动控制,运动控制系统的任务就是对这些关节轴系进行控制,具体由各底层控制器实现。整个控制系统采用分布式控制,在结构上可分为3 个层次,如图2 所示。
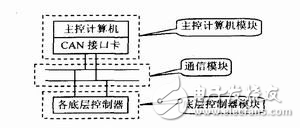
图2 运动控制系统结构框图
1.1 主控计算机模块
主控计算机就是控制系统的“大脑”和司令部,负责整个系统的在线运动规划、动作及运动控制、语音交互控制、视觉导引控制以及人机交互等功能。主控计算机要求体积小,运算速度快,满足机器人实时控制的要求,通常采用高性能小板工业控制计算机。它通过CAN 总线接口卡连接到通信总线上,与各底层控制器相连并交互信息。
1.2 通信模块
机器人控制的信息量大,对通信方面的要求很高,要保证各种信息在控制系统中及时准确的传输,通信工具的选择十分重要,该文选用当前流行的CAN 总线作为通信标准。CAN (Controller Area Net-work) 总线是应用最为广泛的一种现场总线,也是目前为止惟一有国际标准的现场总线。相对于一般通信总线,它的数据通信具有突出的可靠性、实时性和灵活性,可以满足文中的设计要求。具体连接方式为:主控计算机通过CAN 总线接口卡连接到总线上,各底层控制器通过总线收发器挂接到总线上。只要所有器件都遵守相同的通信协议,就可以稳定可靠的进行信息传输。
1.3 底层控制器模块
控制器处于整个控制系统的最底层,主要用来控制各运动关节轴系的具体执行过程。控制器接收主控计算机的控制命令对各关节执行轴系进行控制,同时把底层信息反馈给主控计算机,实现大回路反馈,便于主控计算机协调规划,统一管理。控制器是整个控制系统的核心,也是该文研究的重点,它的性能直接关系到机器人运动能力。
1 控制系统结构
机器人的各种运动由各个关节轴系完成,机器人控制本质上是对各关节轴系的控制。每个轴系具有一个自由度,可以完成某一方向的转动任务,所有轴系同时协调运动就可以完成相对复杂的动作。国防科技大学机电工程与自动化学院机器人教研室最新研制的仿人步行机器人,其内部各关节结构如图1所示。
图1 机器人内部结构示意图
此机器人共有36 个自由度,分布在下肢、上肢、头部和手指等各关节。所有轴系均由PWM 脉冲信号驱动控制,运动控制系统的任务就是对这些关节轴系进行控制,具体由各底层控制器实现。整个控制系统采用分布式控制,在结构上可分为3 个层次,如图2 所示。
图2 运动控制系统结构框图
1.1 主控计算机模块
主控计算机就是控制系统的“大脑”和司令部,负责整个系统的在线运动规划、动作及运动控制、语音交互控制、视觉导引控制以及人机交互等功能。主控计算机要求体积小,运算速度快,满足机器人实时控制的要求,通常采用高性能小板工业控制计算机。它通过CAN 总线接口卡连接到通信总线上,与各底层控制器相连并交互信息。
1.2 通信模块
机器人控制的信息量大,对通信方面的要求很高,要保证各种信息在控制系统中及时准确的传输,通信工具的选择十分重要,该文选用当前流行的CAN 总线作为通信标准。CAN (Controller Area Net-work) 总线是应用最为广泛的一种现场总线,也是目前为止惟一有国际标准的现场总线。相对于一般通信总线,它的数据通信具有突出的可靠性、实时性和灵活性,可以满足文中的设计要求。具体连接方式为:主控计算机通过CAN 总线接口卡连接到总线上,各底层控制器通过总线收发器挂接到总线上。只要所有器件都遵守相同的通信协议,就可以稳定可靠的进行信息传输。
1.3 底层控制器模块
控制器处于整个控制系统的最底层,主要用来控制各运动关节轴系的具体执行过程。控制器接收主控计算机的控制命令对各关节执行轴系进行控制,同时把底层信息反馈给主控计算机,实现大回路反馈,便于主控计算机协调规划,统一管理。控制器是整个控制系统的核心,也是该文研究的重点,它的性能直接关系到机器人运动能力。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 基于仿尺蠖式运动的输电线路巡检机器人 5次下载
- 六足仿生巡检机器人的设计方案 47次下载
- 基于DSP控制器的油气安全智能巡检机器人 43次下载
- 基于DSP的排险机器人车体控制系统 14次下载
- 基于DSP的高压训线机器人数字化控制器 11次下载
- 如何实现双足步行机器人系统设计与运动控制及虚拟现实的仿真研究 20次下载
- ARM嵌入式系统的拟人机器人控制器的设计 12次下载
- 仿人机器人驱动和感知系统的介绍及关节控制器的控制算法分析 20次下载
- 仿人机器人混联灵巧手臂设计及运动学逆解研究_秦利 0次下载
- 基于DSP的双足机器人运动控制系统设计介绍 47次下载
- 仿人机器人复杂动作设计中人——体运动数据提取及分析方法(1) 2次下载
- 一种基于DSP的移动机器人运动控制器设计 77次下载
- 仿人机器人足部姿态实时感知系统
- 仿人机器人控制系统研究及其关节控制器设计
- 小型仿人机器人控制系统设计
- 突破人形机器人控制器性能瓶颈:高效稳定的电容器解决方案 399次阅读
- 海默RC系列机器人控制器 989次阅读
- 运动控制和机器人系统有什么区别 1.5k次阅读
- 基于Memolink通讯实现机器人视觉跟踪系统的设计 4k次阅读
- 基于仿人机器人的多功能通用型控制系统的设计 2.8k次阅读
- 基于仿人机器人BHR-1的视觉跟踪和运动控制系统的设计 4k次阅读
- 基于PIC单片机和PSC控制器实现机器人控制系统的设计 5.1k次阅读
- 焊接机器人控制器的作用 8.5k次阅读
- 机器人控制器有哪些类型_机器人控制器发展 1.3w次阅读
- 移动机器人控制系统设计与仿真 4.2k次阅读
- 浅析运动控制和机器人系统的区别 7.4k次阅读
- 仿人机器人关键技术研究 6k次阅读
- 基于PLC的机器人伺服运动控制系统设计详解 1.7w次阅读
- 仿人型机器人控制系统设计的几个问题 3.7k次阅读
- 基于DSP的覆冰机器人控制系统研究 818次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1电子电路原理第七版PDF电子教材免费下载
- 0.00 MB | 1489次下载 | 免费
- 2单片机典型实例介绍
- 18.19 MB | 91次下载 | 1 积分
- 3S7-200PLC编程实例详细资料
- 1.17 MB | 27次下载 | 1 积分
- 4笔记本电脑主板的元件识别和讲解说明
- 4.28 MB | 18次下载 | 4 积分
- 5开关电源原理及各功能电路详解
- 0.38 MB | 9次下载 | 免费
- 6基于AT89C2051/4051单片机编程器的实验
- 0.11 MB | 4次下载 | 免费
- 7基于单片机和 SG3525的程控开关电源设计
- 0.23 MB | 3次下载 | 免费
- 8基于单片机的红外风扇遥控
- 0.23 MB | 3次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 2PADS 9.0 2009最新版 -下载
- 0.00 MB | 66304次下载 | 免费
- 3protel99下载protel99软件下载(中文版)
- 0.00 MB | 51209次下载 | 免费
- 4LabView 8.0 专业版下载 (3CD完整版)
- 0.00 MB | 51043次下载 | 免费
- 5555集成电路应用800例(新编版)
- 0.00 MB | 33562次下载 | 免费
- 6接口电路图大全
- 未知 | 30319次下载 | 免费
- 7Multisim 10下载Multisim 10 中文版
- 0.00 MB | 28588次下载 | 免费
- 8开关电源设计实例指南
- 未知 | 21539次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935053次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537791次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233045次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191183次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183277次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138039次下载 | 免费



 工商网监
工商网监
评论