机器人需要有一个控制系统,用硬件和软件组成一个的控制系统。
2018-07-30 08:53:21 36100
36100 抓加紧电机等多种电机进行伺服控制。电机的种类和数量相对繁多,因此机器人控制系统相对比较复杂。本文主要研究了覆冰机器人的行走电机伺服控制。行走电机需要带动机器人在线路上行走,当线路有较大覆冰时要带动除冰
2011-09-28 17:47:13
第二章 机器人系统与控制需求简介2.1 工业机器人的系统组成机械本体:精密减速机、伺服电机、伺服驱动器、控制系统(核心零部件)控制柜示教盒2.2 机器人本体结构与传动方式简介四大家族:ABB
2021-09-08 07:44:15
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理机器人的基本工作原理是示教
2021-09-13 08:40:55
视觉系统成为研究的新课题。1965年, Stanford建立机器人实验室开始研究机器人。机器人的定义:【机器人】是一种可以用来移动材料,零件,工具或特定装置的可以重新编程的多功能操...
2021-09-07 08:37:58
文中提出的TMS320DM6437+TMS320F28015的软硬件设计方案在新型球形机器人控制系统中得到初步应用,验证了理论设计的可行性和可靠性,实验结果表明接口数据读写高效可靠。本设计对以后其他双核控制系统接口的设计与研究工作具有很好的参考价值。
2021-05-27 06:46:44
的集中视觉足球机器人底层控制系统,简化了系统设计, 满足微型机器人的控制需要。同时, 也有利于足球机器人自主化的转型和发展。
2009-03-28 14:03:25
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色
2023-12-21 20:03:18
自动或半自动机器人常常需要嵌入式控制系统,从而能够结合高度智能化的确定性控制,并且可以方便地连接到不同的传感器和执行器上。NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。从尖端的机器人研究项目直至高级行业应用,NI平台被证实是高效的机器人解决方案。
2019-11-06 07:50:49
:设计一种基于ARM的智能清洁机器人控制系统。机器人能对未知的室内环境进行全面清扫具备避障和台阶检测功能能实现电量管理自动返回充电。内容包括:1、基于单片机对直流电机的启动、转向、转速、正反转程序
2015-07-06 10:59:02
申请理由:采用DSP作为控制器,控制六轴工业机器人机械臂的运动。项目描述:本人研究生二年级,往算法控制方向进行研究。我的计划是首先学习DSP,因此很是想拥有一个属于自己的DSP开发板,也计划着手用此
2015-09-10 11:15:16
申请理由:作为电子突出的杭州电子科技大学,由于项目需要,对国家级项目,机器人实现控制。主要通过使用DSP,STM32,FPGA三者协调,来实现对机器人实现轨迹规划与速度规划。项目描述:DSP在此
2015-11-02 11:18:53
,完全满足研发的硬件需求。硬件开发经验:曾采用DSP+ARM的方式开制作了六足机器人运动控制系统,使机器人能够实现执行转弯、蔽障和远程遥控等各项功能。项目描述:1、开发板各模块的硬件调试;2、编程实现
2015-07-24 17:18:31
一种小型移动机器人的控制系统研究
2012-08-20 15:53:10
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
ROVER C5 V0501 机器人控制系统采用国际流行的开放式软硬件平台,配以自主研发的避障控制卡、牵引运动卡及机器人内控专用编码器和安全接口;
2019-09-12 09:00:12
上仍处于领先地位,而日本生产的工业机器人在数量、种类方面则居世界首位。工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数
2015-01-19 10:58:38
《先进机器人控制》从控制的角度系统地介绍了机器人学的基础知识和当前的发展状况。全书共分为12章,由基础篇、控制结构篇和先进控制篇构成。基础篇着重介绍串联关节机器人的运动学、运动规划和动力学。其中
2017-09-19 15:30:57
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-07-05 07:08:47
本文以6- PPPS并联机器人为控制对象,以NI公司的系列软硬件产品为基础,依托国家自然基金(No. 30770538)的支持,快速开发了此并联机器人的开放式数字控制系统。
2021-05-12 06:38:22
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-09-20 06:16:58
研究的前沿,它在一定程度上代表了一个国家的高科技发展水平。运动控制系统是机器人控制技术的核心,也是机器人研究领域的关键技术之一,在机器人控制中具有举足轻重的地位,因此,各研究机构都把对机器人运动控制系统的研究作为首要任务。
2020-08-19 06:57:09
用CompactRIO和LabVIEW开发下一代机器人控制系统Author(s):Bill Miller - FIRST Frank Merrick - FIRSTKate Pilotte
2019-05-15 09:40:01
研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期短,能够实现真正的SOPC系统。
2019-10-22 07:35:19
本文概述了上海交通大学机器人研究所研制的新型遥控移动式排爆机器人PBJ-1的嵌入式控制系统固件的情况。利用嵌入式系统技术开发适合排爆等各类遥控地面移动机器人使用的嵌入式控制系统能够解决上述种种矛盾。
2021-06-07 06:11:02
制造出像人一样具有智能的能替代人类劳动的机器人,一直是人类的梦想,人类获取的信息80%以上是通过视觉。因此,在智能机器人的研究中,具有视觉的机器人的研究也就成了第一位的。对机器人视觉伺服系统的研究是机器人领域中的重要内容之一,其研究成果可应用在机器人自动避障、轨迹跟踪和运动目标跟踪等问题中。
2019-09-27 08:07:35
树莓派和其他机器人的控制器有何不同?如何使用树莓派开发智能机器人控制系统?
2021-12-23 06:55:02
其设计是机器人研究的核心。该控制系统通常以MCU、 DSP等为核心,采用上、下位机二级分布式结构。其中上位机一般为PC机,下位机为单片机或DSP等微控制器。但随着移动机器人的智能化,控制方法的发展,所需
2019-07-30 07:02:31
性能与可靠的机械控制性能的同时保证,才能在短时间内准确寻找到火源并灭火回家。在此以ARM9处理器为核心,对基于嵌入式系统的智能灭火机器人进行了设计。本文将从硬件和软件方面讲述智能灭火机器人控制器的实现方法,并且给出了机器人灭火的具体实验,验证了方案的可行性,为智能灭火机器人的进一步研究提供了平台。
2019-07-31 06:23:18
移动机器人是一种能够感知外部环境,在有障碍物的环境中能够实现动态决策与规划,从而完成避障等多种功能的综合系统。机器人系统通常分为机构本体和控制系统两部分,控制系统的作用是根据用户的指令对机构本体进行
2020-03-06 07:07:07
随着人口老龄化进程的加快,更多老年人,尤其是地震和疾病致残的残疾人,都需要照顾。基于此,这里提出一种基于ARM的嵌入式服务机器人控制系统设计。该服务机器人的控制系统是机器人的神经中枢,因而其设计是机器人研究的核心。该控制系统通常以MCU、 DSP等为核心,采用上、下位机二级分布式结构。
2019-10-15 08:03:16
最近在看工业机器人的资料,想知道现在的一些市面上的工业机器人上用的控制控制系统都有哪些厂商呀?
2015-01-23 12:04:01
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-08-21 07:51:24
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的信息处理
2019-08-30 08:23:42
如何去验证电机的运动性能?怎样去设计一种基于STM32F407ZGT6芯片控制板机器人的运动控制系统?
2021-06-29 08:34:12
教室节能控制系统研究
2013-01-18 21:01:51
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-06-30 06:37:34
随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在工厂、生活当中,机器人视觉系统作为智能机器人系统中一个重要的子系统,也越来越受到人们的重视。它涉及了图像处理、模式识别和视觉
2020-04-07 07:27:24
什么是激光SLAM?激光SLAM技术在机器人运动控制系统中的应用是什么?
2021-07-30 06:37:25
移动机器人运动控制系统设计及控制算法研究
2012-08-20 15:54:16
视觉足球机器人底层控制系统,简化了系统设计, 满足微型机器人的控制需要。同时, 也有利于足球机器人自主化的转型和发展。[hide][/hide]
2009-05-25 15:35:22
,年均增长31%,预计2023年我国工业机器人市场增速将在20%至25%左右,仍会维持较快的增速。 飞凌嵌入式作为一家专注嵌入式核心控制系统研发与制造的高新技术企业,经过多年的研发与积累,产品已广泛应用
2023-02-24 17:05:21
论述了由嵌入式计算机组成的3 层仿人机器人控制系统,并详细介绍了其中的关节控制器。控制系统实行逐级控制,任务分散,提高了机器人的智能化程度。关节控制器选用TM320F2811
2009-08-05 10:51:44 24
24 以IPC+DSP 作为六轴工业机器人的控制器, 设计了一种基于可编程多轴控制器PMAC(Programmable Multi-Axis Controller)的开放式机器人控制系统。系统采用双微机分级控制方式和模块化结构软
2009-09-25 16:54:1339 针对北极冰下海洋参数监测的使命要求,对水下机器人控制系统进行了相关研究,将PC104 总线与CAN 总线应用到自主/遥控水下机器人中,实现了一种分布式与集中式相结合的水下
2009-12-19 15:21:1019 基于RTW 的DSP 控制系统研究
摘要 提出了一种基于RTW的TMS320F2812 DSP数字控制系统,基于模型的设计流程,实现了工程开发过程从算法设计到最终实现的所有开发阶
2010-04-07 10:18:1737 针对覆冰机器人除冰时的电机特性,设计一种基于DSP的全数字化控制器,给出了硬件电路和部分软件设计方案。该控制器采用DSP对机器人行走电机进行伺服控制,经过分析,该控制
2010-08-02 10:15:4818 基于CAN总线和双传感器仿人机器人运动控制系统研究
机器人研究是自动化领域最复杂。最具挑战性的课题,它集机械。电子。计算机。材料。传感
2009-10-10 08:57:291046 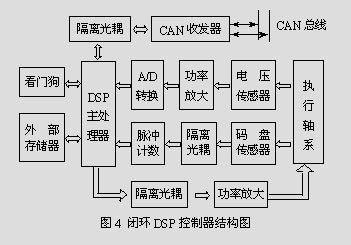
摘要:提出了一种基于AVR单片机Atmega8为核心控制器的比赛机器人控制系统,通过比赛机器人的特征分析,阐述了构成控制系统所需的主控单元、电机驱动单元、传感检测单元及LCD显示单元,其中详细分析了以MCBL3006S为核心的伺服电机驱动单元,以及关系比赛机器人基本
2011-02-11 15:06:5687 摘 要:基于机器人复杂的决策控制和步态管理,采用了个人数字助理(PDA)和数字信号处理器(DSP)组合,并以Windows Mobile作为软件平台。具体分析了控制系统的硬件设计和软件设计方法。真实环境中的实验及比赛结果证明,该控制系统可以实现机器人的复杂控制。 关键
2011-03-01 00:40:0460 对微型足球机器人低层控制系统进行了研究,给出了一种以87C196KC为核心辅以LM629运动控制器构成的双闭环微型足球机器人低层控制系统.由于采用了集成运动控制芯片,不仅简化了系统软硬
2011-03-24 12:14:1557 介绍了分布式控制系统和CAN总线的概念和特性。提出了一种用于智能机器人的分布式控制系统结构,时基于该控昔对系统的智能机器人的体系结构、导航与控制、环境感知进行了研究。
2012-04-25 14:57:5355 机器人多传感器测距系统研究与设计......
2015-12-23 14:46:4910 基于DSP的单相逆变电源智能控制系统研究
2016-03-28 15:19:227 基于DSP的清洗机器人模糊控制系统研究2008。
2016-04-05 10:30:1214 基于DSP的直线电机模糊PID控制系统研究与实现-2010。
2016-04-05 10:52:2219 基于DSP的SVPWM异步电机控制系统研究
2016-04-15 18:29:1613 基于DSP的直线电机模糊PID控制系统研究与实现,有兴趣的同学可以下载学习
2016-04-26 18:16:4217 基于DSP的永磁平面电机运动控制系统研究,有兴趣的同学可以下载学习
2016-04-26 18:16:4218 基于DSP的永磁同步电机控制系统研究,有兴趣的同学可以下载学习
2016-04-27 15:28:3916 步进电机多轴联动DSP控制系统研究,下来看看
2016-05-04 14:09:5630 基于DSP的直流无刷电机控制系统研究,下来看看
2016-05-05 11:37:3912 电子开发机器人相关教程资料——全自主移动机器人控制系统研究
2016-09-06 16:42:430 基于WiFi技术的风力机叶片覆冰监测系统研究_李录平
2017-01-02 15:24:000 MTPA控制的直接转矩控制系统研究
2017-01-21 11:54:3913 管道检测机器人控制系统设计与运动研究_蔡辉
2017-03-19 11:30:431 在机器人学的研究领域中,如何有效地提高机器人控制系统的控制性能始终是研究学者十分关注的一个重要内容。在分析了工业机器人的发展历程和机器人控制系统的研究现状后,本论文的主要目标是针对四关节实验室机器人
2017-09-01 11:25:4411 我们今天的文章:机器人控制技术详解: 机器人控制系统的特点 机器人的结构采用空间开链接结构,其各个关节的运动是独立的,为了实现末端点的运动轨迹,需要多关节的运动协调。所以,其控制系统要比普通的控制系统复杂得多
2017-09-19 18:29:2811 智能移动机器人集成了机械、电子、计算机、自动控制、人工智能等多学科的研究成果,在当前机器人研究领域具有突出地位。控制系统是机器人的核心部分,目前应用在机器人底层控制系统的微控制器主要有8/16位
2017-10-16 16:09:052 介绍了混联机构的搬运码垛机器人控制系统的设计与实现方法,根据工作现场的实际需求,对离线码垛过程进行了研究,通过码垛关键参数的输入和码垛空间判断,建立离线编程的基础,给出硬件控制系统采用工业PC
2017-10-17 16:59:2713 以特种变结构履带式机器人为研究对象,结合机器人的结构特点和性能指标,搭建了基于STM32 的机器人控制系统。采用模块化设计的思想和策略,针对特种变结构履带式机器人的行进模块和可变结构模块进行了
2017-10-31 15:27:1730 弧焊机器人作为工业机器人中使用最为广泛的一种机器人,其控制系统的研究一直是行业的热点。针对常规示教再现型系统无法满足复杂焊缝加工精度的问题,本文基于GUC-T嵌入式运动控制器设计了一套包括示教再现
2018-01-30 10:58:010 规律和跳跃机理。另外,单腿跳跃机器人的动态跳跃步态形式简单,是研究足式机器人动态步态的理想平台。 本文围绕液压驱动单腿跳跃机器人的控制器设计、竖直跳跃运动控制、机器人跳跃实验这三个部分展开。主要工作包括:
2018-01-30 11:03:161 针对轮式移动机器人越障能力不足的问题,设计出了一种兼具轮式和足式移动机构特点的圆弧腿仿生六足机器人。完成了基于飞思卡尔MC568037型DSP及CAN总线的机器人控制系统的设计;对机器人的运动步态
2018-03-16 14:53:473 本文首先介绍了伺服运动控制系统主要特点,其次介绍了伺服运动控制系统工作原理,最后从机器人移动方式的选择与结构设计、移动机器人运动控制系统及机器人的控制系统设计三个方面来详细介绍机器人伺服运动控制系统设计,具体的跟随小编一起来了解一下。
2018-06-01 14:19:3617071 机器人控制系统是指由控制主体、控制客体和控制媒体组成的具有自身目标和功能的管理系统。控制系统意味着通过它可以按照所希望的方式保持和改变机器、机构或其他设备内任何感兴趣或可变化的量。控制系统同时是为了使被控制对象达到预定的理想状态而实施的。控制系统使被控制对象趋于某种需要的稳定状态。
2018-12-17 14:28:4510959 以WMR- 1 型移动机器人为实验对象, 应用Java 技术, 构建了包括HTTP 服务器、图像服务器、机器人服务器和数据服务器的自主移动机器人远程控制系统, 可以为Internet 上的远程访问及操作提供服务.
2019-03-05 17:22:005 机器人的控制系统,就相当于人体的大脑,是机器人的核心组成部分。关于机器人的控制系统有哪些分类呢?机器人控制系统按其控制方式可分集中控制系统、主从控制系统及分散控制系统,下面为大家详细讲讲这些系统。
2019-11-04 08:45:3328258 的青睐,是当前机器人研究的的一个热点问题。控制系统是整个足球机器人系统的核心,它既需要具有较强的信息获取与处理分析能力,同时也必须具有较强的逻辑推理和决策能力。本文以 MiroSot(3:3)的足球机器人比赛为背景,对其
2020-04-07 08:00:0011 一种基于DSP与USB总线的新型开放式移动机器人控制系统,其机器人以PC为上位计算机,用一块DSP运动控制卡对杋器人的两个步进电杋进行控制。并釆用USB总线进行上下位机之间的通讯,很好地实现了机器人
2021-04-26 16:35:5121 针对轮式机器人运动能力的局限性程可视可控的履带式机器人车体进行研究该系统采用DSP为控制核心,铝合金配合伺服电机构成机器用直流电机配合履带的移动方式,VC通过 zigbee向机器人发送指令,驱动机器
2021-05-11 09:51:2114 大家知道现在企业的生产效率为什么这么高吗?是因为目前企业都使用工业机器人进行生产,工业机器人可以连续不间断的生产,所以生产效率才会这么高。工业机器人是怎样生产的呢?它有一个控制系统,现在来看一下工业机器人控制系统有哪几种控制方式。
2021-05-18 15:38:409623 基于DSP无刷直流电机模糊控制系统研究(现代电源技术基础课程)-该文档为基于DSP无刷直流电机模糊控制系统研究总结文档,是一份不错的参考资料,感兴趣的可以下载看看,,,,,,,,,,,,,,,,,
2021-09-22 14:05:545 基于DSP的无刷直流电机模糊控制系统研究(开关电源技术支持)-该文档为基于DSP的无刷直流电机模糊控制系统研究总结文档,是一份不错的参考资料,感兴趣的可以下载看看,,,,,,,,,,,,,,,,,
2021-09-22 15:00:1110 用该操作步骤可将项目中的每个机器人控制系统分配给一个实际应用的机器人控制系统。然后,项目可从 WorkVisual 传输到实际应用的机器人控制系统中。
2023-03-08 11:20:267342 用该操作步骤可将项目中的每个机器人控制系统分配给一个实际应用的机器人控制系统。
2023-04-17 17:28:542779 工业机器人控制系统是工业机器人的核心组成部分,它负责接收输入信号、处理信息、控制机器人的运动和执行任务。随着工业自动化和智能制造的快速发展,工业机器人控制系统的重要性日益凸显。本文将详细介绍工业
2024-06-16 15:38:043207
 电子发烧友App
电子发烧友App













 工商网监
工商网监
评论