控制/MCU
雷达距离校准仪的工作原理是什么?有哪些关键技术?
数控移相器原理框图如图5所示。每一级电路由两只单刀双掷开关、延时线构成,通过控制,可以选择不延时或者延时。对于60 MHz中频,第一级的移相为1°,第二级的移相为2°,第三级的移相为4°,第四级的移相为8°。故四阶数控移相器可实现的移相范围为0~15°,移相分辨率为1°。
如何用单总线技术设计一个环境状态监控系统?
采用单总线技术设计环境状态监控系统,只要将一条双绞线(一根为信号线,一根为地线)从计算机拉向监控现场,然后将各种监控对象挂在其上就可以了,其示意图如图2所示。图中是以PC机串行口作输出的,因此需要串接一个由RS232到单总线的适配器。实际上,单总线技术也允许从PC机或单片机并行口的某一位输出。图中只画出了一个监控现场的配置,其布线接头与电话线路通常用的一样,插入和拔出都很方便。
怎样设计一个由8位单片机控制的温度湿度监控仪?有什么优点?
由8位单片机控制的温度湿度监控仪,成本低,可靠性好,系统操作简便,测量精度可满足一般家电、农业大棚、办公自动化及工控系统对温度湿度控制及监测的需要,用于监测露点时,其误差小于2%,可用于一些需要监测露点的场合,能满足一般工业场合的需要。

什么是嵌入式系统?嵌入式软件系统测试中的仿真系统架构设计有什...
嵌入式软件是基于嵌入式系统设计的软件,是计算机软件的一种,同样由程序及文档组成,可细分成系统软件、支撑软件、应用软件三类。嵌入式软件大量应用于家用、工业、商业、通讯和国防领域。我国目前在嵌入式应用软件方面具有优势。在嵌入式系统中,软件的工作量约占全部工作量的80%,其中测试与验证的工作量占软件工作量的70%。
怎样设计一个基于VxWorks系统的单板快速恢复方案?
两种启动方式的区别:正常启动就是目前的做法,将整个单板上所有的硬件和软件同时做复位处理,其所需要时间达到了253s,十分漫长;快速恢复启动方案则并没有将整个单板复位,而只是在操作的过程中将CSM6800进行了硬复位操作,其主控CPU没有复位,不仅如此,主控CPU上面驻留的操作系统和操作系统隔离层都没有受到影响,只有应用层的各个任务被重新启动了一遍。

电桥平衡自调节的原理是什么?怎样设计一个基于MSP430单片...
若R2·R3-R1·R4=0,则电桥保持平衡。测量中电桥初始输出值一般不为零,这可能导致传感器在测量信号时超过满量程或者为负值,使得通过A/D转换器所获得的数据不可靠。点画线内为电桥平衡调节的核心部分,其中O≤n≤1。
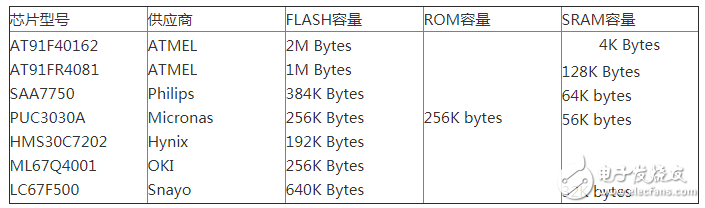
32位RISC CPU ARM芯片有哪些应用?应该怎样选型?
最后需说明的是封装问题。ARM芯片现在主要的封装有QFP、TQFP、PQFP、LQFP、BGA、LBGA等形式,BGA封装具有芯片面积小的特点,可以减少PCB板的面积,但是需要专用的焊接设备,无法手工焊接。另外一般BGA封装的ARM芯片无法用双面板完成PCB布线,需要多层PCB板布线。
怎样设计实现一个基于嵌入式Linux和MiniGUI的SIP...
为了实现这两个条件,在程序实现中使用了写指针和读指针来判断缓冲区是空还是满。在初始化时读指针和写指针为0;如果读指针等于写指针,则缓冲区是空的;如果(写指针+1)%N等于读指针,则缓冲区是满的,%表示取余数,N表示缓冲区队列的长度。
怎样设计并实现一个基于Linux的PPPoE内核模式拨号?
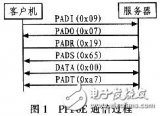
在PPPoE Discovery阶段,客户机首先广播一个PADI(0x09)帧。收到PADI帧的一个或多个服务器会发送PADO(0x07)帧,这个包中包含了服务器的各种标识。然后,客户机会选择其中一个服务器发送PADR(0x19),表明主机选择了这个服务器。最终,收到PADR(0x65)帧的服务器会为新的会话分配资源并向客户机发送PADS(0x65)。当此阶段完成,这两次的对话完成了SESSION_ID以及双方物理地址,为后续数据会话打好基础。

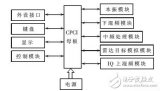
怎样设计实现一个基于ARM控制器LPC2214的税控收款机系...
税控收款机是指具有特定税控功能的电子收款机,它是集软硬件为一体的嵌入式系统,硬件设计考虑高性价比和高可靠性,软件设计考虑系统的稳定性和可靠性。根据这一原则,本文介绍了一种基于ARM控制器LPC2214的税控收款机的设计方案。
基于ARM内核处理器的的实时测控系统开发平台设计与实现
ARM内核处理器具有高性能、低功耗、低成本、低开发难度等一系列优点,是测控系统由8位机升级到32位机的理想选择。此外,ARM7、ARM9、ARM10、XScale的指令兼容,已有的软件资源和开发经验不会由于升级到更高性能的处理器而受到巨大的损失。
基于J2ME的可移植应用开发标准平台
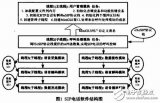
该网络运行状态监控系统的设计目的是对企业的计算机网络系统的运行状态进行实时监控和报警。该系统可以实时采集网络运行资料、判断网络运行状况并对网络故障报警。无线应用模块的主要功能是:通过手机等无线设备进行网络故障报警,对网络运行状态、网络设备、维护负责人等信息进行查询,方便对网络运行的实时监控和维护工作。

51单片机13×14点阵缩码汉卡的设计依据是什么?有哪些应用...
由上可见,目前单片机各种汉字显示方案均不理想。标准字库法,单片机不堪重负;而其它方法最大且又无法克服的缺点是,所显示文字皆有局限。显示内容也皆须专业人员设计而定,用户难于更改。这便极大地限制了单片机在各个领域的开拓和应用。究其原因,皆为单片机本身无汉卡,而这也正是我们致力于“51汉卡”开发的初衷。
设计硬件实时操作系统的运行原理是什么?
实时操作系统的核心是任务调度内核,其主要功能是根据调度算法,在每个调度时机确定下一个将要执行的任务,并适时进行现场切换。为此,调度内核需要维护一系列的任务队列(如就绪任务队列和等待任务队列),并在每个调度时机,根据优先级重新排列就绪队列,以计算出优先级最高的就绪任务。

基于32位处理器MPC5200B的PCI仲裁器逻辑扩展设计
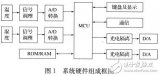
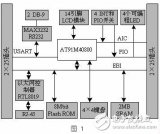
飞思卡尔公司的MPC5200B是基于PowerPC架构下的一款性能卓越的微处理器。它具有760MIPS、带浮点运算单元(FPU)、低功耗等特点。该处理器采用高性能的e300内核,集成了高性能存储控制器、中断控制器、DMA控制器、PCI控制器、以太网控制器以及USB、CAN 2.0A/B、I2C等丰富的接口。其结构框图如图1所示。
可提高软件模块化、并行性和维护性的实时操作系统
在Windows中常见的沙漏现象(即用户等待现象)在实时系统中是绝对不允许的。因为这可能造成通讯中断,马达损毁等灾难性的结果。DSP/BIOS是特别针对实时系统,运行于德州仪器C5000,C6000系列的DSP之上的一个实时操作系统。DSP/BIOS实际上是一个可调用的系统模块API的集合。以下就各个模块分别加以介绍。

基于FPGA的图像采集压缩SOC系统设计与实现
虽然本设计所构建的SOC系统是基于FPGA的,但是在上板调试前首先在PC上建立整个系统的仿真环境,对系统进行充分的验证,这样可大大的加速整个项目的进度。本设计中为系统建立的仿真环境如图6所示。
硬件实时操作系统信号量管理的工作原理是什么?怎样去实现它?
该硬件系统中ECB基本存储单元通过调用系统的IP核来实现,根据存储数据的不同,采用不同的IP核;多个基本单元通过一个上层文件生成一个ECB单元,每个单元再作为一个基本器件用于实现整个ECB的存储体。通过地址的译码选通ECB单元,根据控制信号对数据做读写操作。

在动态称重系统中高速数据采集电路有什么应用?
本电路使用内部精密参考电源。传感器的信号经滤波放大后送到MAX120,再经内部采样保持电路后便开始转换,然后经14个时钟周期后完成一次转换,此时INT/BUSY变为低电平,并由D0~D12送出转换后的数字信号,并一直保持到下一次转换结束。图3是MAX120在模式5下的时序。该电路用INT/BUSY作为串行时钟,并利用其下降沿将转换后的数据打入CPLD中的存储体。

基于模型的设计代码验证有什么优点?
控制工程发展的下一步曾是个很大的挑战:产品级的代码生成。快速原型代码通常包含许多调试例程、数据收集代码、主机-目标通信代码以及用于交互测试的其他补充代码。一般而言,这些代码的优化程度不足以将其运用在可交付使用的系统中。代码生成工具经过改进后,可以生成高效率的代码,足以部署到产品级嵌入式系统中。今天,许多行业都认为从控制模型自动生成产品级代码是最佳的做法。















编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |


