本文提出了普适机器人系统同时机器人定位、传感器网络标定与环境建图的概念,通过分析三者之间的耦合关系,给出同时定位、标定与建图问题的联合条件概率表示,基于贝叶斯公式和马尔科夫特性将其分解为若干可解项,并借鉴Rao-Blackwellized粒子滤波的思想分别求解。
2016-09-18 16:10:23 2776
2776 
现在的机器人少不了有各种传感器,传感器之间的标定是机器人感知环境的一个重要前提。所谓标定,是指确定传感器之间的坐标转换关系。由于标定的传感器各异,好像没有特别通用的方法。
2022-11-25 09:34:463679 在机器视觉中,怎么标定坐标原点啊,我用的图像匹配可以标定一个坐标原点,但是在不同的图像上会有偏移,怎么才能减小偏移呢。求大家指教一下
2013-01-18 15:53:54
本帖最后由 lilin0734 于 2017-11-15 20:09 编辑
机器视觉手眼标定
2017-11-06 10:45:41
请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
目前产业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对产业机器人的运动轨迹进行示教或离线编程,可节约
2015-01-23 15:02:27
机器人视觉、机器视觉傻傻分不清楚。你是不是也有这么个疑问呢?机器人视觉和机器视觉是一样的吗?它们有什么不同?答案当然是不一样。机器人视觉是指用计算机来实现人的视觉功能,也就是用计算机来实现对客观
2020-08-28 10:48:50
视觉系统成为研究的新课题。1965年, Stanford建立机器人实验室开始研究机器人。机器人的定义:【机器人】是一种可以用来移动材料,零件,工具或特定装置的可以重新编程的多功能操...
2021-09-07 08:37:58
1.机器人视觉机器人研究的核心就是:导航定位、路径规划、避障、多传感器融合。定位技术有几种,不关心,只关心视觉的。视觉技术用到“眼睛”可以分为:单目,双目,多目、RGB-D,后三种可以使图像有深度
2019-06-08 08:30:00
labview 视觉机器人抓取工件 CCD相机的二维坐标系的建立?希望分享,谢谢
2017-08-18 20:53:37
列举部分学习过程中接触的部分书籍,部分有中文版,部分有更新版本。1.机器人基础书籍适合入门的书籍:机器人学机器人建模规划与控制机器人学、机器视觉与控制——MATLAB算法基础机器人学导论——分析控制
2019-05-22 06:53:10
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
;人工焊接难度大.加装传感器后的应用优势:加装激光焊缝跟踪传感器,使复杂焊接工序简单化,机器人与焊缝跟踪传感器只需标定一次,传感器将焊缝数据传输给机器人,机器人在接受数据后进行精准定位并焊接,同一种工件无需重复示教标定,大大减少了因工件异形带来的焊接难度,提高生产效率。
2020-12-02 09:36:09
视觉技术是近几十年来发展的一门新兴技术。机器视觉可以代替人类的视觉从事检验、目标跟踪、机器人导向等方面的工作,特别是在那些需要重复、迅速的从图象中获取精确信息的场合。
2019-09-04 08:00:27
物理坐标后,和当时的Z轴坐标几乎是一样的,很相近,那么,为什么不直接用机器人的中心坐标,而要进行旋转标定呢?
2021-11-09 15:36:24
安全,对一些特殊工种,如喷涂,铸造等通过劳动法强制采用工业机器人来代替,这样可以大大增加工业机器人的需求数量。视觉机器人我国的机器人产业化必须由市场来拉动,机器人作为高新技术,它的发展与社会的生产、经济状况
2016-09-08 10:34:05
颜色识别功能是火星人视觉传感器的基本的功能,现有视觉传感器颜色识别距离有限,不适用于多颜色场景。针对这些问题,本传感器采用改进的数字图像处理算法,能完成多个物体颜色识别,提升准确率。处理过程分为三个
2021-12-17 07:47:04
NI VISION 与机器人做引导怎么样实现手眼标定好像没有像其他视觉类似的函数...哪位大侠可以指点一二谢谢了
2018-04-09 15:35:20
``【课程推荐】龙哥手把手教你学LabVIEW机器视觉设计教程请问哪位大神有Labview机器视觉相机标定的程序文件,麻烦分享一下?在下不甚感激!qq:599108466.``
2016-05-25 12:36:45
ZN-RAI02工业机器人与视觉实训平台是什么?ZN-RAI02工业机器人与视觉实训平台有哪些技术性能?ZN-RAI02工业机器人与视觉实训平台的结构是由哪些部分组成的?ZN-RAI02工业机器人与视觉实训平台有哪些配套软件?
2021-08-09 06:22:03
labview视觉九点标定程序分享下,感谢各位大佬
2021-01-25 18:08:29
最近在做视觉,需要用labview做相机的标定,通过空间转换确定空间位置。视觉助手的标定只能标定内参数,没有办法做内外参数的标定,哪位大神给指导指导如何做一个标准的标定程序。
2017-04-24 16:08:44
项目名称:基于机器视觉的工业机器人抓取工作站试用计划:申请理由本人是嘉兴技师学院教师,浙江机器人有限公司技术顾问。在机器人领域有5年多的学习和开发经验,曾设参与多项工业机器人工作站的开发与调试
2019-09-18 14:18:14
申请理由:现在正在参与视觉机器人的项目,想了解更多的关于机器人的产品与知识。项目描述:水果采摘机器人:机器人寻找视野中的水果,并移动到相应的位置,由机械臂进行采摘水果并放到指定的位置。
2015-10-29 11:00:03
项目名称:基于机器视觉的工业机器人抓取工作站试用计划:申请理由 本人是嘉兴技师学院教师,浙江机器人有限公司技术顾问。在机器人领域有5年多的学习和开发经验,曾设参与多项工业机器人工作站的开发与调试
2019-09-18 19:24:11
项目名称:机器人项目评估试用计划:本人在有机器人和视觉领域有7年多的学习和开发经验,曾设计过AGV、机械手、视觉相机等的开发和应用类似谷歌眼镜版的开源AR眼镜,对计算机图像标定技术,图像识别,运动
2019-10-30 17:03:03
双目视觉的原理:由于视差原理,左右两个ccd的位置固定,若能测量空间中同一个点P在左右两个ccd中图像的位置,则根据三角原理,可以求得P点在空间中的坐标位置。可用于摄像头实现空间点的距离测量。下图
2021-09-27 16:52:18
拿到一个题目,视觉采摘机器人。目前对视觉处理方面毫无头绪,由于条件有限,只做出概念实物。机器人只有达到识别该果蔬并采摘下来的效果。有没有大神提供一下思路。
2018-04-10 09:22:27
九点标定,我有助手做到这步就不知道如何进行下去,在助手里面,鼠标在图片界面时能实时转换像素坐标到 机器人坐标 但是生产代码后,就没有如何转换的公式。。。。迷雾啊,大神出来指点一下
2019-07-09 09:56:04
`华南机器人应用培训中心拥有各种设备,开展各种不同的机器人培训班。打造各种工业现场常见的机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生工业机器人培训对外招生。 一、认识机器人技术:工业
2015-09-02 14:03:18
。再说白一点,双目视觉最基本的目的就是从复杂的客观世界中提取出我们感兴趣的“点”、“线”、“面”,再用数字来描述,从而精确的理解并控制它们。这个原理里面包含三大部分内容:下面以机器人导航应用为例进行说明
2013-11-21 16:20:51
表面的三维信息和由摄像机成像的几何模型;(3)获取和发送目标点的坐标视觉定位系统的目标就是为了找出目标物在工业机器人的基础坐标系上的坐标,然后把摄像机获得的标定与图像在工业机器人的基础坐标系上的坐标联系起来
2021-11-17 11:27:44
标定精度的大小,直接影响着计算机视觉(机器视觉)的精度。因此,只有做好了摄像机标定工作,后续工作才能正常展开,可以说,提高标定精度也是当前科研工作的重要方面。 1 摄像机透视投影模型 摄像机通过成像
2019-06-04 08:00:00
效果。付梦印等提出以踢脚线为参考目标的导航方法,可提高视觉导航的实时性。 这里采用视觉导航方式,机器人在基于结构化道路的环境下实现道路跟踪,目标点的停靠,以及导游解说,并取得较好的效果。2 导览机器人
2019-07-04 08:30:00
本系统搭建了基于单目视觉的SCARA机器人硬件平台,并使用圆形供料盘混合投放多种颜色的保险片,利用CCD摄像机获取保险片的图像信息,从图像中提取其轮廓形状及坐标信息,并利用摄像机参数标定,通过坐标变换得到保险片在机器人坐标系的空间坐标,然后控制SCARA机器人夹爪对保险片工件进行精确定位和抓取。
2019-06-19 06:30:00
参数在计算机标定的时候计算出来即可,其矩阵表示如下: 以上就是整个摄像机标定的基本原理和相关概念,在机器3D视觉计算中,先要通过标定确定这些参数,通常的做法是通过一些包含了非常明显的图案样本(棋盘
2018-09-28 10:32:24
制造出像人一样具有智能的能替代人类劳动的机器人,一直是人类的梦想,人类获取的信息80%以上是通过视觉。因此,在智能机器人的研究中,具有视觉的机器人的研究也就成了第一位的。对机器人视觉伺服系统的研究是机器人领域中的重要内容之一,其研究成果可应用在机器人自动避障、轨迹跟踪和运动目标跟踪等问题中。
2019-09-27 08:07:35
组成(台皮带线输送模组、视觉定位及检测模组、码垛模组、装配模组、打螺丝模组、取料模组、机器人TCP标定模组、PC模组等)。通过对该工业机器人视觉装配实训平台的6关节机器人和平面关节机器人、多功能夹具
2021-07-01 12:05:38
ZN-RAI02工业机器人与视觉实训平台一、概述1、ZN-RAI02工业机器人与视觉实训平台以工业机器人与机器视觉为核心,将机械、气动、运动控制、变频调速、PLC控制技术有机地进行整合,结构
2021-07-01 06:38:35
教你如何从零做一个智能象棋机器人?怎样去设计一个基于机器视觉与dobot的象棋机器人呢?
2021-12-23 06:22:11
在物流搬运行业,拳头机器人由于其独特的并联结构,常用于高速整列、装箱等场合。其中,拳头机器人的视觉线跟踪技术正得到广泛的应用,如下图所示:
2020-08-06 06:30:31
关于ros智能机器人,就是一个写智能机器人代码的一个虚拟机,
2021-10-13 19:20:16
机器人视觉传感器详解一种新型的工业机器人已经走到行业的前沿, 他们的主要特点是能够安全地协助人类工作。在网上有很多人谈论它们,但你认真了解过它吗?
2020-08-14 07:24:17
一种新型的工业机器人已经走到行业的前沿, 他们的主要特点是能够安全地协助人类工作。在网上有很多人谈论它们,但你认真了解过它吗?在2008年,很多人爱它们只是处于好奇心。在2012年,机器人被视为
2020-08-17 06:00:49
随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在工厂、生活当中,机器人视觉系统作为智能机器人系统中一个重要的子系统,也越来越受到人们的重视。它涉及了图像处理、模式识别和视觉
2020-04-07 07:27:24
视觉系统的发展趋势怎么样?3D视觉系统应用在哪些方面?未来的机器人3D视觉系统将会发生什么样的变化?
2021-05-11 06:40:14
的使用?相信不少人是有疑问的,今天深圳市四元数数控技术有限公司就跟大家解答一下!深圳市四元数数控技术有限公司机器视觉应用之标定板的使用如下:1、误差测量与评估,高精度标定系统通过精密刻画的专业图像标定板在
2022-02-25 09:55:55
原来一直用AVR做简单机器人,但是到后来机器人功能复杂了就不行了。现在想做有简单视觉功能的小型机器人,没有显示屏,所以没有GUI的问题。个子小(100mm*100mm*100mm以内),重量轻
2020-06-19 09:00:20
想用Labview做机器视觉,怎样将Labview通过视觉算出的工件的偏移量以及偏移角度的值通过Profinet网络赋于ABB机器人里的变量(变量类型:num)?
2016-10-31 13:15:38
我是新人,求帮助啊,明天需要提交轮式机器人应用的报告,求大神给点建议,可用轮式机器人应用于那些方面,要求实际可行,应用于生活,农业,军事都可以,谢谢啦
2013-04-17 16:32:16
基于DM642的机器人双目视觉系统设计
2021-04-02 07:20:41
光学标定板应用领域宏诚光学玻璃系列标定板和陶瓷系列标定板是专为高校实验、研究单位项目研发和机器视觉集成商产品标定等等客户群体使用的常用标定工具,能够方便获得相机的标定数据。标定板作用:为校正镜头畸变
2022-09-20 08:14:32
摘要:CCP 协议是一种CAN 总线标定匹配协议。本文简单介绍该协议的基本原理,以及一种基于该协议的汽车ECU 标定系统的实现方法。最后,结合MC9S12DP256 芯片以及μC/OS-II操作系统
2009-05-16 20:10:34 45
45 机器人视觉伺服系统是机器人领域一项重要的研究方向,它的研究对于开发手眼协调的机器人在工业生产、航空航天等方面的应用有着重要的意义。本文针对机器人视觉伺服系统的
2009-05-30 11:34:0127 本文给出了robocup 中型组足球比赛机器人在全维视觉情况下,对足球比赛中目标定位的一种方法。文中推导了一种针对全向摄像机镜面投影的变换关系,该方法简单有效,为全维
2009-08-14 09:37:3921 本文给出了robocup 中型组足球比赛机器人在全维视觉情况下,对足球比赛中目标定位的一种方法。文中推导了一种针对全向摄像机镜面投影的变换关系,该方法简单有效,为全维
2009-08-14 09:38:448 天津星云律动科技有限公司智能机器视觉自动化设备-尺寸分拣仪-星律自动化非标定制设备
2023-01-13 15:43:56
基于视觉系统的移动机器人导航技术是近年来移动机器人研究领域的一个热点,而摄像机标定是视觉系统的基础,它建立了摄像机系统尺寸(像素)和已知的三维世界坐标系系统
2010-01-20 14:08:3738 CCP协议是一种基于CAN总线的匹配标定协议。 本文介绍了该协议的基本原理,通信方式以及用于ECU标定的各种工作模式,并讨论了一种基于CCP协议的汽车ECU标定系统,该系统实现了对
2010-07-13 17:39:1760 视觉传感器的标定技术
双目视觉传感器由两台性能相同的面阵CCD摄像机组成,基于立体视差的原理,可完
2009-11-07 11:42:011723 利用机器视觉的摄像机标定方法研究
机器视觉的基本任务之一是从摄像机获取图像信息并计算三维空间中物体的几何信息,以由此重建和识别物体。而空间物体表面某
2010-03-04 10:04:541009 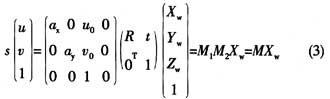
本文提出了普适机器人系统同时机器人定位、传感器网络标定与环境建图的概念,通过分析三者之间的耦合关系,给出同时定位、标定与建图问题的联合条件概率表示,基于贝叶斯公式和马尔科夫特性将其分解为若干可解项,并借鉴Rao-Blackwellized粒子滤波的思想分别求解。
2016-09-19 10:53:1832 本文CameraCalibrator类源代码来自于OpenCV2 计算机视觉编程手册(Robert Laganiere 著 张静 译) 强烈建议阅读机器视觉学习笔记(4)——单目摄像机标定参数
2017-02-08 03:36:38523 (4)——单目摄像机标定参数说明 机器视觉学习笔记(5)——基于OpenCV的单目摄像机标定 机器视觉学习笔记(6)——双目摄像机标定参数说明 1.双目摄像机标定目的 双目摄像机标定最主要的目的就是要得出左右两个摄像机的相对位置关系,但是在OpenCV中,计算表示左右摄像机位置的矩阵R和T的同时,也可
2017-02-08 03:41:12578 一、哪些情况需要标定零点 零点是机器人坐标系的基准,没有零点,机器人就没有办法判断自身的位置。 机器人在如下情况下要重新标定零点: 1.进行更换电机、机械系统零部件之后。 2.超越机械极限
2017-09-19 18:31:0815 在三维视觉测量系统中,对仪器参数的标定是首先需要解决的难题,而对投影仪的内外参数标定是三维结构光测量系统中不可或缺的一部分。就目前而言,投影仪的参数标定还存在着标定精度偏低、方法单一、可操作性差等
2017-11-06 15:30:2120 使用LabVIEW和用于DENSO的ImagingLab Robotics库,机器视觉和机器人系统可以集成在一个应用程序中。本文介绍了使用相同坐标系统在机器视觉系统和机器人系统之间进行标定的方法
2017-11-17 17:03:2512640 机器视觉的基本任务之一是从摄像机获取图像信息并计算三维空间中物体的几何信息,以由此重建和识别物体。而空间物体表面 某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定
2017-11-17 17:53:3814885 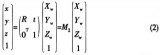
Gibbon机器人快速标定系统适用于机器人焊接、切割、机器人雕刻等要求绝对定位精度和轨迹精度较高的应用场合。
2018-07-05 09:30:002340 针对借助激光跟踪仪标定机器人所涉及的坐标系统一问题,对基于空间几何法拟合建立的基坐标系与机器人理论基坐标系的转换关系进行了研究,提出了一种基于对偶四元数法的机器人基坐标系标定方法。利用指数积公式推导
2018-03-07 10:43:522 在机器视觉的测量中,我们得到的尺寸并不是我们真实的物体尺寸,而是像素值,那么如何将像素值转成我们需要表示的实际物体尺寸,此时,需要进行坐标的标定。
2018-12-29 13:56:334012 常见的机器人视觉伺服中要实现像素坐标与实际坐标的转换,首先就要进行标定,对于实现视觉伺服控制,这里的标定不仅包括摄像机标定,也包括机器人系统的手眼标定。
2020-09-10 16:40:233705 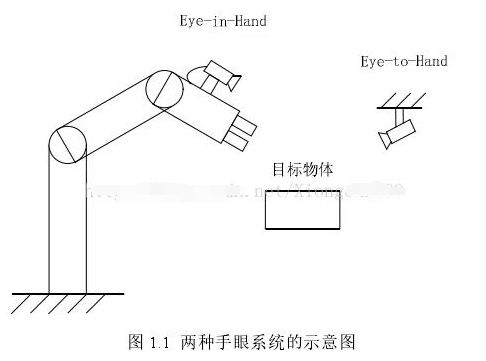
法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。同时也相对于自标定而言,提高了精度,便于操作。因此张氏标定法被广泛应用于计算机视觉方面。 张正友标定法的标定板 今天,我们就来讲解一下张
2020-12-31 10:06:195425 
机器视觉系统基本构成和各部件基本原理介绍。
2021-04-19 15:23:289 组成的多轴系统、Scara四轴机器、六轴机器人(在运行过程中保证几个自由度不动,运行即可) 一、 标定介绍 1. 标定模型A:相机固定(夹具不旋转) 夹具夹取产品或者标定块,选取一个特征,开始进行标定 X轴、Y轴移动一个位置,记录轴的物理坐标
2021-05-08 10:05:1834068 
相机固定不动, 上往下看引导机器人移动 机器人与视觉标定理论详解 1.相机非线性校正使用标定板做非线性校正2.相机与机器人做9点标定可以使用机器人扎9个点,或者机器人抓住工件摆放9个位置,得到
2021-05-27 14:15:533252 
机器视觉系统基础知识与基本原理说明。
2021-05-27 14:44:0515 在大多数条件下,这些参数必须通过实验与计算才能得到。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。
2022-06-21 11:12:347613 文中提出的方法介于传统标定法和自标定法之间,但克服了传统标定法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。同时也相对于自标定而言,提高了精度,便于操作。因此张氏标定法被广泛应用于计算机视觉方面。
2022-08-22 10:07:232538 相机非线性矫正2、相机与机器人做9点标定3、计算机器人的旋转中心4、相机通过公式计算得出最终输出结果注:由于选择中心距离视野很远,通常拟合出来的旋转中心存在比较大的误差,给定位精度造成影响。
2022-11-11 09:32:401210 法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。同时也相对于自标定而言,提高了精度,便于操作。因此张氏标定法被广泛应用于计算机视觉方面。
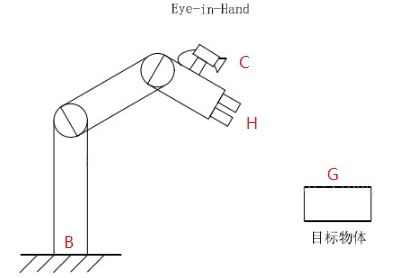
2022-11-14 10:14:402383 常见的机器人视觉伺服中要实现像素坐标与实际坐标的转换,首先就要进行标定,对于实现视觉伺服控制,这里的标定不仅包括摄像机标定,也包括机器人系统的手眼标定。 以常见的焊接机器人系统为例,有两种构型。
2023-02-06 15:24:211136 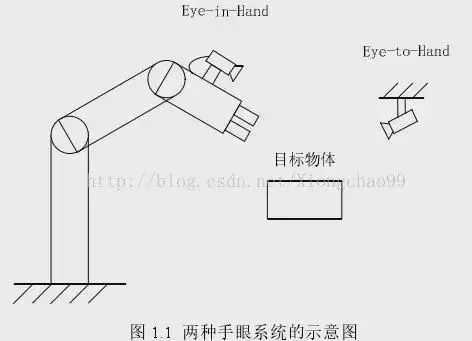
机器人的零点标定是需要将机器人的机械信息和位置信息同步,来定义机器人的物理位置,从而使机器人能够准确地按照原定位置移动。
2023-02-16 10:46:011958 随着工业现场需求的日益变化,机器视觉在机器人集成项目中的应用越来越广泛。在视觉与机器人的配合中,要解决的问题有很多,比如视觉的内外参标定,视觉系统和机器人间的标定问题,视觉和机器人间的通讯等等。
2023-07-14 11:01:314039 
常见的机器人视觉伺服中要实现像素坐标与实际坐标的转换,首先就要进行标定,对于实现视觉伺服控制,这里的标定不仅包括摄像机标定,也包括机器人系统的手眼标定。
2023-08-04 11:48:47579 
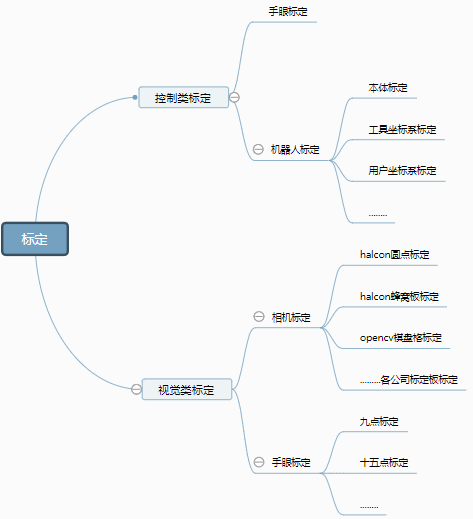
机器人标定技术是提高机器人末端绝对定位精度的重要方法。可分为三个层次:一是关节级标定,二是机器人运动学标定,三是机器人动力学标定。
2023-09-15 09:49:521226 
利用本质矩阵和基本矩阵的摄像机标定方法;利用主动系统控制摄像机作特定运动的自标定方法(主动视觉标定方法)。
2023-10-16 11:42:11253 
这个逼近的过程就是「相机标定」,我们用简单的数学模型来表达复杂的成像过程,并且求出成像的反过程。标定之后的相机,可以进行三维场景的重建,即深度的感知,这是计算机视觉的一大分支。
2023-10-18 17:00:07476 
在机器人零点校正时,轴被移到一个定义的机械位置,即所谓机械零位。如果机器人在这机械零位, 那么每个轴的绝对传感器值被存储。零点标定目的是使机器人各轴的轴角度与连接在各轴电机上的绝对值编码器的脉冲计数值对应起来的操作。具体而言,是为了求取零度姿势的脉冲计数值的操作。
2023-11-19 16:19:411140 
作为无人车以及智能机器人而言,在装配过程中各个传感器之间的外参标定一直是比较头疼的问题。这里作者也系统的学习了一下,传感器的外参标定和在线标定问题。
2023-11-20 15:45:05303 
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论