首先,我们会解析彩扩机工作原理;然后,我们根据它的工作原理探讨其工作条件,对系统搭建设计初步方案。
2019-05-21 07:28:00 5610
5610 本文是“开关稳压器的基础”的“降压型开关稳压器的工作原理”相关的补充。在“降压型开关稳压器的工作原理”中,介绍了“降压型异步(二极管)整流式开关稳压器的电路和工作”。作为这篇文章的补充,在此介绍同步
2021-03-05 12:03:307218 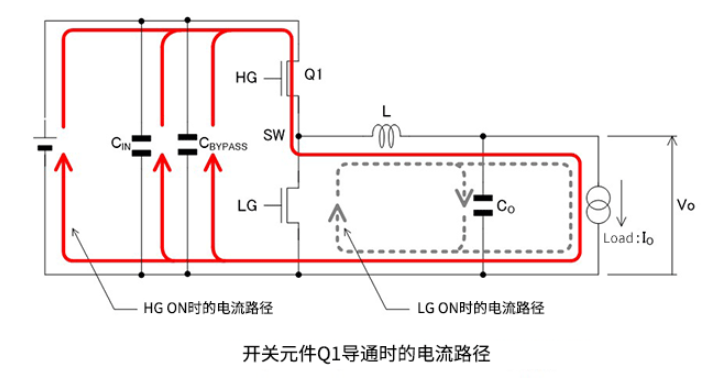
..catkin_make 二、功能包里涵盖的文件 功能包 功能 acml 定位算法 move_base navigation中最主要的框架 base_local_planner 局部路径规划
2021-09-13 16:49:583617 在这篇文章中,我们将介绍鉴频鉴相器(PFD)的工作原理。
2023-11-22 14:49:091594 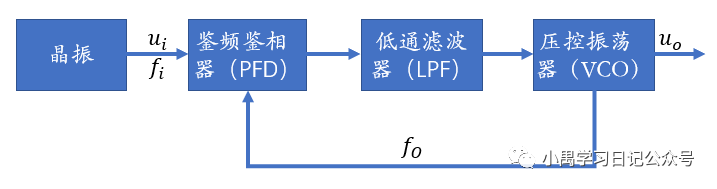
我现在在做机器人的路径规划,想用人工势场的算法,通过用这个labview仿真,就是给定一些起始点,终点,还有这个障碍物的坐标,中间是这个算法计算出来的一些点,能够在执行算法的时候用labview描出这些点,最终形成一条规划好的路径。有没有朋友做过,给点意见呗
2017-05-15 15:25:22
路径规划用到的人工智能技术二 人工智能编程语言/数据结构与算法三 人工智能基础原理四 智能信息获取(简称爬虫) 与数据分析1、发起请求3、解析内容4、保存数据二、Requests库介绍2.1基本介绍
2021-07-20 06:53:18
【嵌入式系统】DMA工作原理与常用函数解析1、DMA基本原理直接存储器访问通道(DMA, Direct Memory Access)用来提供在外设和存储器之间或者存储器和存储器之间的高速数据传输
2021-12-16 07:15:12
LCS的动态规划算法(自底向上)
2020-05-25 15:06:29
S-function函数S-function工作原理
2020-12-31 06:17:03
我现在做这个机器人的路径规划,有一个人工势场的算法,已经用C实现算法,请问一下能否用这个labview仿真,就是给定一些起始点,终点,还有这个障碍物的坐标,中间是这个算法计算出来的一些点,能够在执行算法的时候用labview描出这些点,最终形成一条规划好的路径。
2015-04-22 16:04:32
如何去提高汽车的主动安全性和交通安全性?从算法上解读自动驾驶是如何实现的?有哪几种常见的车辆路径规划算法?
2021-06-17 10:56:09
使用dijkstra算法,dijkstra算法是特别经典的路径分析算法,文章中的算法也确实很容易理解,文章中算法的起点终点均是在节点上并且是已经构建好路网了,但是我们实际运用过程中需要自己构建用于计算的路网
2019-05-23 08:13:33
动态规划算法资料。
2017-08-30 20:44:12
论文主要研究一种改进的遗传算法在多个自动导引车(AGV)路径规划中的应用。其创新体现两方面,首先,三交换启发交叉算子用来获得比传统的两交换启发交叉算子的改进遗传算法优化的更多信息,产生更多的后代
2019-09-11 11:52:16
本帖最后由 gk320830 于 2015-3-8 06:44 编辑
大家来讨论一下用蚁群算法实现路径规划的硬件实现问题,不仅仅是用matlab做仿真算法,具体的硬件连接都可以再下面讨论,谢谢大家,共同学习~~
2013-04-26 17:19:54
本帖最后由 eehome 于 2013-1-5 10:10 编辑
這是一篇基楚教學[attach]开关电源工作原理详细解析[/attach]
2012-09-21 05:09:51
机器人路径规划学习者一枚,谁了解现在最新的路径规划方法及实现,求指教,不胜感激啊。。。。。。。。。。。
2013-09-03 21:15:09
1、求路径规划的代码源程序2、路径规划的学习资料(最好是基于c语言的代码学习)3、关于基于模糊神经网络的路径规划的算法的C程序的学习4、各种路径规划的学习资料也可以
2016-09-25 17:22:47
最终要去哪,但是对于机器人怎么绕开眼前的障碍物特别在行。这两个层次的规划模块协同工作,机器人就可以很好的实现从A点到B点的行动了,不过实际工作环境下,上述配置还不够。比如A*算法规划的路径是根据已知地图
2017-08-01 13:50:56
蓝牙耳机的工作原理蓝牙耳机听个响?
2020-12-30 06:28:24
采用动态可变长编码的方法,以栅格表示环境。针对遗传算法大型障碍物难的问题,采用follow wall行为,较好地解决了基于遗传算法的快速路径规划和大型障碍物避障问题。该算法适
2009-04-17 09:31:43 53
53 针对势场法所固有的几个缺陷,提出了一种基于势场法的移动机器人避障路径规划算法,并成功应用于未知复杂环境下移动机器人的路径规划中。仿真试验表明:提出的方法具
2009-05-27 12:59:2730 为了提高家用吸尘器使用的效率,并保证安全性和可靠性,提出利用超声波传感器来测距的环境信息采集的吸尘器清扫路径规划算法。首先本文简要描述了机器人路径规划的目标,超
2009-06-26 11:42:2646 本文介绍了基于神经网络和微粒群优化算法的移动机器人动态避障路径规划算法。通过神经网络改进的微粒群算法,充分利用了神经网络的融合性和并行性来提高微粒群算法中适应
2009-07-11 08:52:3118 采用进化规划算法进行IIR数字滤波器的优化设计。进化规划算法是一种模拟自然选择和变异机制的随机并行优化算法。本文首先描述了进化规划算法,并将进化规划算法用于IIR 数字
2009-08-07 09:53:3921 对于非常规环境下的局部路径规划,建立了相应的数据量测模型,提出了分块和滤波算法体系。通过实车试验验证算法及系统的可靠性,并对结果进行分析、规律进行总结,研究
2009-12-14 16:45:075 针对移动机器人规避障碍和寻找最优路径问题,提出了在复杂环境下移动机器人的一种路径规划方法。采用了栅格法建立了机器人工作平面的坐标系,整个系统由全局路径规划和
2009-12-18 11:58:4326 本文对基于空间数据库的移动机器人路径规划算法中引入先裁剪再检索的思想,在此基础上提出一种全新的移动机器人路径规划算法。该算法能使规划的路径成功地得到短的无碰路径,
2010-02-23 13:51:2513 提出一种分层路径规划算法来解决大范围海洋环境下的智能水下机器人(AUV)的全局路径规划问题。该算法将
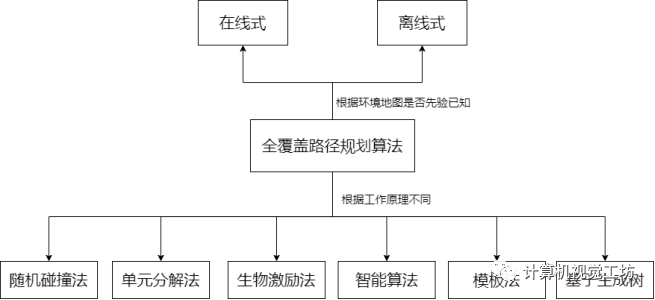
2010-03-03 14:52:0118 路径规划技术是机器人控制技术研究中的一个重要问题,目前的研究主要分为全局规划方法和局部规划方法两大类。在对一些较有代表性的研究思想及其相关算法分析的基础上,比
2010-03-03 14:53:3839 提出一个基于插值的路径规划算法-插值 A*。此算法可以在每个栅格路径代价不一致的情况下生成一条平滑路径。由于大多数基于栅格算法规划的路径只能从一个栅格中心到另一栅
2010-03-03 14:59:2616 交通资源规划是一种比较典型的组合优化问题,新型的仿生算法——蚁群算法,由于具有正反馈性、鲁棒性、并行计算、协同性等特点,非常适合于解决交通资源规划问题。针对出租车
2010-09-01 09:42:040 三极管开关电路工作原理解析
图一所示是NPN三极管的 共射极电路,图二所示是它的特性
2009-11-24 10:50:36270157 校验码工作原理解析
元件故障噪声干扰等各种因素常常导致计算机在处理信息过程中出现错误。为了防止错误,可将信号采用专门的逻辑线路进行编码以检测错误,甚
2010-04-13 14:16:072036 
组合逻辑控制器组成结构及工作原理解析
按照控制信号产生的方式不同,控制器分为微程序控制器和组合逻辑控制器两类
微程序控制器是
2010-04-15 11:20:5112372 针对目前导航系统中重要的多约束条件下路径规划功能,结合A*算法和蚁群算法提出一种新的不确定算法,该算法首先将多约束条件进行融合使其适合蚁群转移,并在基本蚁群算法基础
2012-06-07 08:56:530 针对基本蚁群算法在机器人路径规划问题中容易陷入局部最优的问题,提出了一种改进的蚁群算法,利用遗传算法加入了变异因子使最优路径产生变异,从而降低了蚁群算法陷入局部极
2012-08-29 14:48:3678 多轴联动线性插补及其_S加减速”规划算法
2016-05-03 14:23:2613 触摸屏的应用与工作原理解析
2017-02-08 02:13:1738 基于实时交通信息的动态路径规划算法性能比较_黄西洲
2017-03-16 10:04:380 改进蚁群算法的机器人焊接路径规划_王春华
2017-03-19 11:41:391 改进蚁群算法的飞机冲突解脱路径规划方法_倪壮
2017-03-19 19:04:391 路径规划是游戏人工智能领域的核心问题,如何建立一种高效的路径规划方法仍是研究的热点之一。针对游戏中NPC的路径规划问题,将A*算法与改进的人工势场法相结合,提出了一种混合算法。A*算法用于全局路径
2017-11-14 14:55:337 基于传统人工势场法的机器人路径规划存在障碍物附近目标不可达和局部极小点的问题。在研究该问题产生原因的基础上,提出了一种基于改进人工势场法的移动机器人路径规划算法。该算法在斥力函数中引入了机器人
2017-11-20 14:28:2515 联接起来,因此,转换器常常是两个仪表(或装置)间的中间环节。下面就来看看D/A与A/D转换器工作原理解析
2017-11-24 11:16:57106356 
为了缓解无线传感器网络(WSN)中传感器节点分布不均匀、传感器节点感知数据量不同而造成能耗不均衡、热区等问题,提出一种优化网络生命周期和最短化路径的WSN移动sink路径规划算法(MSPPA)。首先
2017-11-29 14:46:560 针对传统的路径规划算法并不一定能计算得到现实中最优路径的问题,提出一种融合了出租车驾驶经验并以时间为度量的路径规划算法。该算法的实现是将路径规划这个以计算为中心的技术变为以数据为中心的数据驱动挖掘
2017-11-30 09:27:130 动态规划算法和贪心算法,这两种算法都是选择性算法,就是从一个候选集合中选择适当的元素加入解集合。两种算法的应用背景很相近,针对具体问题,有两个性质是与算法选择直接相关的,最优子结构性质和贪心选择性
2017-11-30 10:22:1875172 
针对有向异构节点部署存在覆盖漏洞多、局部部署不均匀等问题,提出一种有向异构传感器网络目标路径覆盖的精确部署算法( DHPSA)。自主部署过程分为两个阶段:首先,节点在邻居节点的虚拟作用力和指定路径
2017-11-30 10:33:520 用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。
2017-11-30 10:34:4324212 
动态规划算法是通过拆分问题,定义问题状态和状态之间的关系,使得问题能够以递推(或者说分治)的方式去解决。
2017-11-30 16:09:3415386 针对无人艇运动规划问题,通过Dubins路径的理论分析,提出一种利用纯粹几何方法的Dubins路径计算方法。该方法中没有出现解方程组的运算,而是首先根据无人艇运动状态计算转向圆,然后利用几何方法计算
2017-11-30 17:37:052 为解决拖挂式移动机器人系统路径规划算法精准性低、稳定性差和无法考虑系统间安全性等的问题,提出一种基于路径跟踪方法的路径规划算法。该算法融合快速拓展随机树( RRT)基本算法和路径跟踪控制方程,通过
2017-12-04 14:18:306 针对路径规划算法收敛速度慢及效率低的问题,提出了一种基于分层强化学习及人工势场的多Agent路径规划算法。首先,将多Agent的运行环境虚拟为一个人工势能场,根据先验知识确定每点的势能值,它代表最优
2017-12-27 14:32:020 为寻找传感节点均匀分布时Sink节点的最优移动路径和最大网络生存时间,提出一种无线传感网的Sink节点移动路径规划算法MPOA)。在MPOA算法中,将Sink节点的数据收集范围分解成多个圆环,将监测
2018-01-18 15:20:580 针对快速探索随机树( RRT)算法进行路径规划时随机性大且未考虑移动代价的问题,提出了任意时间快速探索随机树算法。生成一组快速探索随机树,之后每个树都重新使用上个树的信息来不断改进树的延伸。为进一步
2018-02-10 11:57:310 自主构建环境地图,具有重要的现实意义。 针对智能机器人如何以最优探测路线自主探测和构建室内环境地图的问题,提出一种基于滚动窗口的路径规划算法。将传统遍历构图的牛耕遍历方式改进为未知环境的探测策略,并结合滚动窗
2018-02-27 10:02:5018 Lattice算法隶属于规划模块。规划模块以预测模块、Routing模块、高精地图和定位的结果作为输入,通过算法,输出一条平稳、舒适、安全的轨迹,交给控制模块去执行。我们可以看到,规划模块在Apollo中是一个承上启下的重要模块。
2018-09-05 14:14:2410062 针对A° 算法在数宇高程模型(DEM)路径规划中的低效问题,提出一种基于距离与坡度的改进A”寻路算法。该算法面向规则网格DEM,以距离和坡度作为路径搜索评估指标,设计新的评价函数,并以地表障碍评判
2018-11-22 16:01:465 针对多 Agent 路径规划问题,提出了一个两阶段的路径规划算法。首先,利用改进的蚁群算法来为每个Agent规划出一条从起始点到目标点,不与环境中静态障碍物碰撞的最优路径。在蚁群算法的改进中引入反向
2019-04-26 16:24:0310 协同工作,机器人可更好的规划从起始点到终点的行走路径。A*与D*机器人路径规划算法介绍在实际情况中,机器人路径规划除了考虑已知环境和未知环境地图,还要考虑到动态和静态环境下的路径规划。A*(A-Star
2019-09-06 21:34:512341 自动驾驶汽车的路径规划算法最早源于机器人的路径规划研究,但是就工况而言却比机器人的路径规划复杂得多,自动驾驶车辆需要考虑车速、道路的附着情况、车辆最小转弯半径、外界天气环境等因素。
2020-03-08 17:29:0015735 车辆自主驾驶系统从本质上讲是一个智能控制机器,其研究内容大致可分为信息感知、行为决策及操纵控制三个子系统。路径规划是智能车辆导航和控制的基础,是从轨迹决策的角度考虑的,可分为局部路径规划和全局路径规划。
2020-07-28 09:04:344412 走机器的路,让你看一下。 在机器人研究领域,给定某一特定任务之后,如何规划机器人的运动方式至关重要。 最近,GitHub 上开源了一个存储库,该库实现了机器人技术中常用的一些路径规划算法,大部分代码
2020-11-12 18:27:241938 路径规划是移动机器人导航最基本的环节,指的是机器人在有障碍物的工作环境中,如何找到一条从起点到终点适当的运动路径,使机器人在运动过程中能安全、无碰撞地绕过所有障碍物。
2020-12-26 10:49:254361 最近,GitHub 上开源了一个存储库,该库实现了机器人技术中常用的一些路径规划算法,大部分代码是用 Python 实现的。值得一提的是,开发者用 plotting 为每种算法演示了动画运行过程,直观清晰。
2020-12-28 14:25:486493 
路径规划是车载导航系统的基本功能,由于其有较强的应用价值,国内外学者对此进行了深入的研究[1-3]。现今较流行的算法有Dijstra算法(简称D算法)和A*算法,但D算法搜索速度较慢,A*算法搜索速度快但成功率不高,且这些算法只能在静态地图上进行路径规划,没有考虑实时变化的交通状况。
2021-04-05 08:36:003162 
路径规划是车载导航仪的重要功能模块。在开发车载导航仪过程中,为了实现路径规划模块,对单车辆路径规划算法进行了研究。
2021-03-31 13:45:051864 
路径规划算法是自主水下航行器(AUV)完成水下自主巡航的核心算法之一。分别综述了基于环境建模和路径搜索两类AUⅣ路径规划算法。阐述了栅格法、可视图法和维诺图法等环境建模方法的囯内外硏究现状,并指出
2021-04-09 16:01:078 未知环境及动态障碍的改进人工势场( Artificial Potential field,APF)路径规划算法。在该算法中,智能体构建了以目标点为中心的引力势场,以及以障碍物为中心的斥力势场,在智能体行进路途中感知局部障碍及目标点的运动信息,并且
2021-04-14 14:52:145 自动驾驶汽车从A点行驶到B点,需要轨迹规划算法来进行全局规划,而具体都有哪些算法呢?这篇文章想和大家分享一下一类最常用的轨迹规划算法,基于图搜索的规划算法。 在开始介绍图搜索算法之前,先简单介绍一下
2021-04-25 18:02:373017 
为解决非结构化复杂场景下基于搜索的寻路算法中存在的计算时间长、路径非最优等问题,在跳点搜索( Jump pointsearch,JPS)算法的基础上,提岀一种带权重的跳点搜索( weighted
2021-05-06 16:29:2413 智能路径规划法。首先,将切片后得到的二维平面进行凹多边形凸分解,形成打印子区;然后,对每个分区内部进行沿分区长轴打印以减少打印路径数量和总行程;最后,将子分区的连接视作TSP旅行商问题,使用遗传算法完成子分区间的打印
2021-05-17 16:25:1616 针对多自动导引车( Automatic guided vehicle,AGV)在柔性制造系统中岀现的路径规划与冲突问题,提出了一种基于时间窗的改进 Dijkstra算法,实现多ΔGⅤ的动态路径规划
2021-05-17 16:30:5610 整理和分类,按照结果最优性的不同,多智能体路径规划算法被分为最优算法和近似算法2类。最优的多智能体路径规划算法主要分为基于A*搜索、基于代价增长树、基于冲突搜索和基于规约的4种算法。近似的多智能体路径规划算法主要
2021-06-04 11:56:434 改进鲸鱼优化算法在路径规划的应用综述
2021-06-23 17:02:4815 基于元胞遗传算法的机器人路径规划技术
2021-06-29 16:12:114 基于改进蚁群算法的水下无人机路径规划
2021-06-30 10:49:2512 嵌入式GIS中最优路径规划算法研究与实现(嵌入式开发项目经理)-嵌入式GIS中最优路径规划算法研究与实现
2021-07-30 12:49:524 A星路径规划算法完整代码资料汇总
2021-12-03 17:16:5511 ,在边界和区域管控、反恐防爆监视以及军事应用中具有很高的效费比。无人机群监视覆盖航路规划算法是提升无人机群监视任务效率和能力的核心算法。传统覆盖航路规划算
2022-03-03 16:01:59471 
摘要: 为解决传统覆盖航路规划算法结果样式单一、对抗性环境下灵活性差的问题,提出了基于遗传算法的监视覆盖航路规划算法,生成样式多样、监视任务执行中对抗性好的监视覆盖航路。在人工势场法的基础上,将激发
2022-04-01 11:02:311030 什么是晶振 晶振工作原理解析
2022-12-30 17:13:573727 
a. 本栏路径规划利用矩阵(二维数组)来表示栅格地图(因为对于矩阵,无论MATLAB、C++还是Python,矩阵更适合数组的表达,更便于编程。)
2023-03-15 11:40:351146 第一章 自动驾驶决策规划算法数学基础 第一节:决策规划算法的地位和作用 该笔记来自b站up主(偶像):憨厚老实的老王 视频链接主页 第二节:为什么规划中经常见到五次多项式
2023-06-02 14:17:520 算法。而局部路径规划是在全局路径规划之后对
路径进行一个符合车辆动力学,平稳性的轨迹优化,主要采用计算几何与数值分析中的拟合曲线。本篇文章主要是介绍路径规划算法的
大纲。
2023-06-07 14:23:410 什么是安全光栅?工作原理及应用领域解析
2023-06-24 10:19:531005 
什么是安全光栅?工作原理及应用领域解析
2023-06-29 09:45:24959 
RRT 算法是一种对状态空间随机采样的算法,通过对采样点进行碰撞检测,避免了对空间的精确建模带来的大计算量,能够有效地解决高维空间和复杂约束的路径规划问题。
与PRM类似,该方法是概率完备且非最优的。可以轻松处理障碍物和差分约束(非完整和动力学)的问题,并被广泛应用于机器人路径规划。
2023-07-28 15:45:541174 
本文会用matlab实现Dijkstra算法,并且会分享一些函数用法的链接,也是本人学习得来,供大家参考,批评指正。
2023-09-06 15:36:53409 基于搜索的路径规划算法已经较为成熟且得到了广泛应用,常常被用于游戏中人物和移动机器人的路径规划。
2023-10-13 14:23:42155 
如何规划机器人的运动方式是机器人开发领域的一大课题,本文分享GitHub的一个机器人技术中常用的路径规划算法的开源库,并用动图直观演示运行过程。其中大部分代码由Python实现。
2023-10-21 09:36:24370 
路径规划算法主要可分成两种,一种是基于搜索结果的规划,另一类便是本文中将要提及的基于采样的规划。 一般而言,基于搜索的规划(如Astar)通常是运行在栅格地图上的。当栅格的分辨率越大时,算法搜索
2023-11-16 15:45:03180 
通往目的地的安全和无碰撞的路径。 路径规划问题可以分为两个方面: (一)全局路径规划:全局路径规划算法属于静态规划算法,根据已有的地图信息(SLAM)为基础进行路径规划,寻找一条从起点到目标点的最优路径。 通常全局路径
2023-11-24 15:57:31284
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论