针对温度控制而设计的FB58(TCONT_CP)简析
特 点:具备温度信号转换的功能,带自整定功能,同时具备模拟量输出和PWM输出方式,两步控制方式,比例....
基于以太网的PC Station与S7-1200进行通信
在第一个槽中,从“用户应用程序”,选择“OPC服务器”添加一个OPC Sever 的应用。
在第三....
Simatic Net PC软件的S7 OPC通信服务功能
Simatic Net PC软件的S7 OPC通信服务是该软件最常用的功能,用于具备OPC客户端功能....
如何去实现S7-1500从站的激活与取消激活
当D_ACT_DP指令的输入参数 MODE=1或MODE=2 时,RET_VAL输出指令运行时的故障....
用户定义数据类型的结构
用户定义数据类型(UDTs)是你自己创建的特殊数据结构。因用户数据类型指派了名字,他们可以用很多次。....
FESTO模块配置
通过现场总线实现非环参数访问,通过以太网实现非环数据访问,快速启动 (FSU),通过现场总线实现通道....
通过PROFINET进行电源管理
借助CapCtrl.xml 进行的工业以太网接口配置不是PROFIenergy的函数并且必须分开考虑....
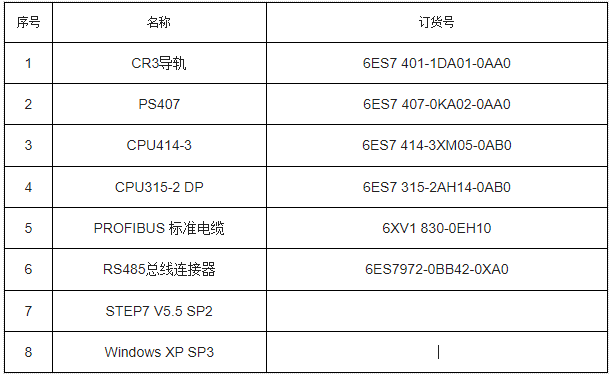
S7-400基于PROFIBUS总线的S7单边通信
2. 组态 2.1配置S7-400站点 S7-400站点配置参见表2。 序号 说明 图示 1. ....
FESTO焊钳故障报警分析
这次焊钳的气管接错,没有造成焊钳故障报警,但是在焊钳进行夹紧时出现卡顿现象.在作机器人E1轴移动时报....
针对机器人负荷情况如何偏量学习
所有机器人的零点标定位置都是相似的,但不尽相同。精确位置在同一机器人型号的不同机器人之间也会有所不同....
KUKA用KRC浏览器在线工作
仅在 编程和诊断 工作区域内: "Programming and diagnosis " 将 Wor....
KUKA机器人系统函数
功能 INVERSE 从一个笛卡尔位置用附加轴角度计算合适的机器人轴角度。在此不必为笛卡尔位置指定状....
KUKA机器人高级编程- 全局变量的应用举例
PUBLIC 只用于在此所述的用途,即在数 据列表中与 GLOBAL 确定的数据对象一起使其全局可用....
KUKA机器人程序中铣削清零方式
KUKA机器人程序中铣削清零方式: ;FOLD bin3 ( !F329 ) = 1 ....
关于PLC的组态文件
程序中的系统数据指的是PLC的组态文件 系统数据块(SDB)由各种应用程序创建,有时甚至由CPU自行....
关于PROFIBUS 配置
PROFIBUS 配置 KEB 上的 PROFIBUS(KUKA 扩展总线) 扩展总线被插入到 Wo....
S7-400基于PROFIBUS总线的S7单边通信的组态步骤
S7协议是SIEMENS S7系列产品之间通讯使用的标准协议 ,其优点是通信双方无论是在同一MPI总....
KUKA扩展总线的PROFIBUS配置分析
使用搜索功能 (2) 在 DTM 目录 (3) 中找到 PB I/O 模块,然后双击将其分配给空闲插....
如何诊断PROFIBUS DP通信的中断问题
① 检查至 DP 主站的总线电缆是否断开,主站是否上电。可以通过测量电阻阻值的方法判断DP电缆的通断....
STEP 7 Safety V17 指令-CMP
输入指令上方操作数占位符中的第一个比较值(< 操作数 1>)。输入指令下方操作数占位符中的第二个比较....
机器人关于A577先导阀问题
机器人在手动执行使时, 顺序块在原位,程序中断,所以在手动时不执行程序驱动向前时,是不会有A277的....
TIA Portal Openness V13 SP1安装程序
安装程序会自动安装“TIA Portal Openness V13 SP1”附加软件包。
KUKA机器人的负载电压US1和US2选项
当接口带负载电压 US1/US2 时,负载电压US1 未接,US2 通过安全技术连接,由此可在驱动装....
机器人关于RIP的程序代码设计
当使用 F819时 MIT_VW_WASS(水控制单元)将被激活, 控制A513 开水,或A515关....


