 KUKA机器人高级编程- 全局变量的应用举例
KUKA机器人高级编程- 全局变量的应用举例

使变量、常数、信号、用户数据类型全局可用
可通过数据列表或通过 $CONFIG.DAT 使变量、信号和自定义数据类型全局可用。
常数必须始终在数据列表中进行声明并同时初始化。因此,只能通过数据列表使其全局可用。
通过数据列表使对象全局可用:
1. 在程序顶部的数据列表中添加关键词 PUBLIC:
DEFDAT MY_PROG PUBLIC
2. 在协议时使用关键词 GLOBAL。
示例 (变量的协议):
DEFDAT MY_PROG PUBLIC
DECL GLOBAL INT counter
...
ENDDAT
只有在数据列表中已经协议了变量、信号和自定义数据类型时,才能将 GLOBAL 用于它们。
PUBLIC 只用于在此所述的用途,即在数 据列表中与 GLOBAL 确定的数据对象一起使其全局可用。PUBLIC 单独无作用。
$CONFIG.DAT
在段落 USER GLOBALS 的 $CONFIG.DAT 中声明该对象。关键词 GLOBAL 在此不需要,在此也不使用。
在 $CONFIG.DAT 中不允许使用用关键词 GLOBAL 在数据列表中定义的数据类型。
示例:
在 DEFDAT PROG() 中已经用关键词 GLOBAL 定义了计数类型 SWITCH_TYP:DEFDAT PROG()
GLOBAL ENUM SWITCH_TYP ON, OFF
...
如果在 $CONFIG.DAT 中使用该数据类型,则编译器报告错误 “类型未知:***DECL SWITCH_TYP MY_VAR ”。
DEFDAT $CONFIG
DECL SWITCH_TYP MY_VAR
...
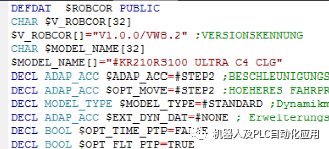
VASS标准中的例子:
全局关键词PUBLIC的应用。
$ROBCOR全局文件的使用:
$MACHINE全局文件的使用:
审核编辑 :李倩
-
变量
+关注
关注
0文章
616浏览量
29585 -
数据类型
+关注
关注
0文章
238浏览量
14236
原文标题:KUKA机器人高级编程- 全局变量的应用举例
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
如何搞定嵌入式 C语言中的全局变量问题?
C语言全局变量重点使用
请问C语言开发单片机为什么大多数都采用全局变量的形式?
探索RISC-V在机器人领域的潜力
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由!
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
什么是机器人?追溯机器人技术的演变和未来




评论