通过软件指令块S7-300 CPU支持多少个PID回路?
LMN变小:例如LMN从80 减小为50,则高低电平比例从8:2变为5:5,低电平的持续时间边长;由....
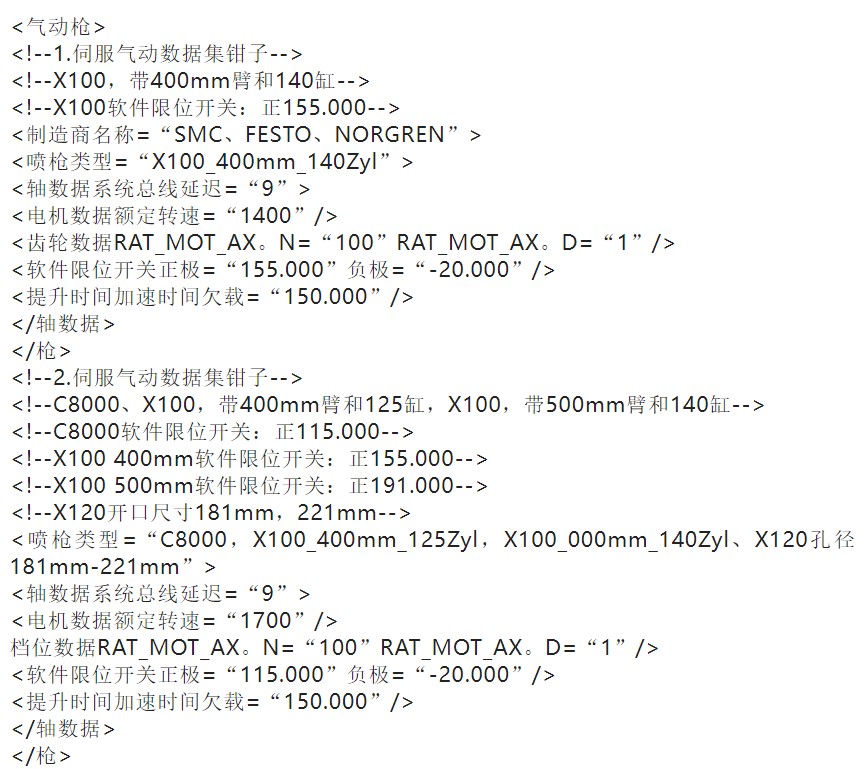
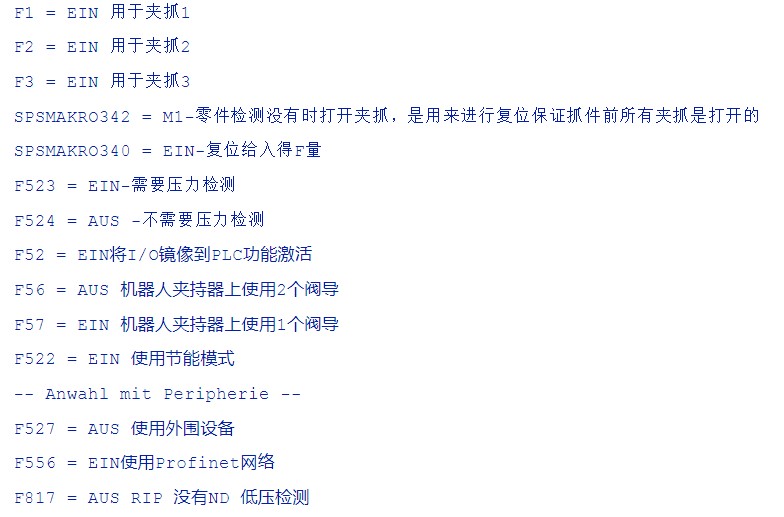
机器人定位抓手的使用原则
工位背景:机器人带抓手抓件,将抓手放到工位里,然后PLC和夹具将机器人抓手固定,机器人于抓手脱开,其....
关于焊钳二极管的一些报警
当预定义的变压器被选定时, 将会自动选择匝数比和二极管的类型, 当变压器的类型未知,必须设定变压....
通过接触位置确定后续坐标位置
当M29被触发后当前位置被报存为BASE31,从而后续使用BASE31的轨迹点的轨迹点实现偏移.
S7-1500和S7-1500之间S7通信
使用 STEP7 V14 在同一个项目中,新建两个S7-1500站点,然后做 S7 通讯。
S7-300 PN CPU之间的TCP通信(STEP7)
SIMATIC S7- PN CPU包含一个集成的 PROFINET 接口,该接口除了具有 PROF....
PROFINET IO中的诊断机制分析
PROFINET IO 支持您使用一致性诊断概念。PROFINET 以三种不同的方法提供有关系统错误....
S7-400H参数设置
S7-400H冗余站中的参数配置与S7-400 标准站中的过多区别。相比标准S7-400系列,S7-....
使用TIA Portal创建用于操作和监视机器与工厂的画面
预定义的对象可协助您创建这些画面;可以使用这些对象仿真机器、显示过程和定义过程值。
S7-300读写时钟和时钟同步的步骤解析
S5TIME是用BCD码保存的,在数据存储区占用两个连续的字节。下图给出的例子中时间值为127,时基....
C#打开文件对话框(OpenFileDialog)
OpenFileDialog是一个类,实例化此类可以设置弹出一个文件对话框。比如:我们发邮件时需要上....
字符串定义及格式
从第三个字符开始为实际有效的字符,最大可设置254个字符长度,每个字符的数据类型是:Char。字符是....
使用LPNDR_ReadGlobalInfo函数块读取IP地址和MAC地址
使用 LPNDR_ReadGlobalInfo 函数块可以读取 PROFINET 设备的 IP 地址....
启动仿真软件WinCC Runtime Advanced测试可视化功能
可通过仿真软件“WinCC Runtime Advanced” 测试可视化功能。
FC对输出的错误处理
如果没有数据被写至 FC 的 OUT参数,FC将会输出一个随机值!对于 FB, 因为其可以使用背景数....
PROFINET将ET 200S组态为PROFINET IO设备
运行 SIMATIC 管理器,然后打开您按照《入门指南》的“CPU 315-2 PN/DP 、317....
PROFINET将ET 200S组态为PROFINET IO设备的步骤简析
运行 SIMATIC 管理器,然后打开您按照《入门指南》的“CPU 315-2 PN/DP 、31....
怎样去使用KUKA 8.3系统中MAKRO40 POT空运转呢
计算空运转时P值得赋值PAR2就是你要给空运转时设备的运行虚拟时间
西门子PLC多重背景的使用规则与解决方法
用户也可以将多个电机的背景数据同时传递到一个背景DB。为此,用户必须增加一个FB来管理电机控制器的多....
对于FC或FB中的临时变量使用
由于 FC 没有自己的存储空间,所以必须指定实参给它的参数(这就是为什么 FC 的输入输出管脚必须填....
SEW-MOVIDRIVE之ProfiNet网卡
Profinet,新一代工业自动化通讯标准 , Profinet成功地实现了工业以太网和实时以太网技....
西门子S7-300/400系列CPU数据块寄存器使用错误
西门子 S7-300/400 系列 CPU 拥有两个数据块寄存器,它们保存着当前打开的数据块编号: ....


