 PLC控制伺服 如何实现暂停功能?
PLC控制伺服 如何实现暂停功能?

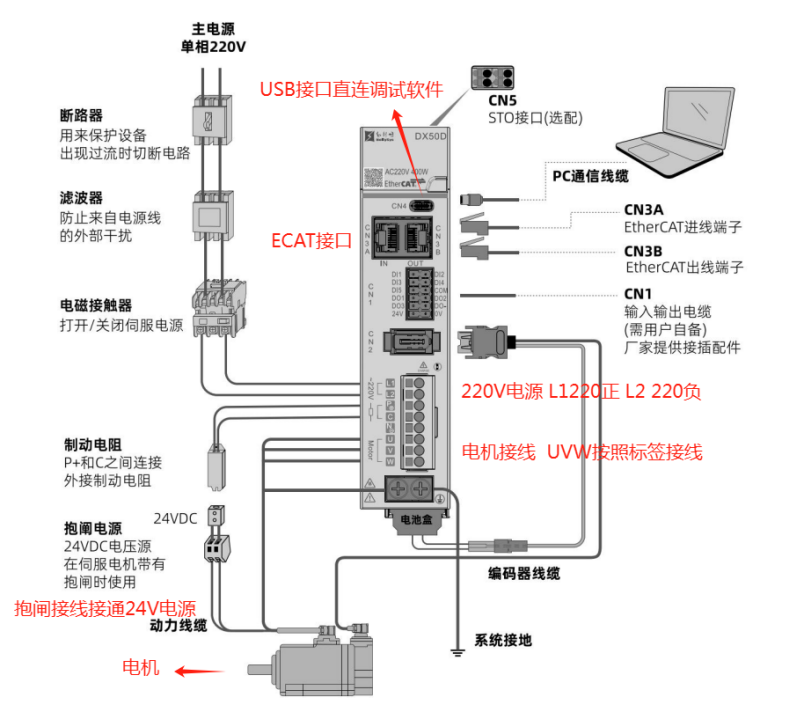
plc控制伺服,如何实现暂停功能,基本可以从硬件和软件的方面去实现伺服电机的暂停功能。硬件方面就是断开伺服驱动器的电源,在这里一般都有一个常闭的信号接到驱动器电源的接触器上,一旦发生故障则断开电源。我们可以利用这个信号来实现暂停功能。有的伺服驱动器还专门配有控制回路电源开关,如下图的L1C和L2C。硬件方面我们主要控制电源的输入来实现暂停功能。

那么软件方面,则主要在使能和脉冲控制这两个信号去实现暂停功能。使能信号伺服电机运行的前提,在驱动器的使能信号ON状态下,接受脉冲电机正常旋转,没有接受到脉冲时是锁死的状态,此时电机是转不动的,当使能信号OFF状态下,则电机无论有没有接受到脉冲都不会旋转。因此可以把使能信号控制为关闭状态实现暂停功能,但容易影响位置精度。脉冲控制则是上位机如PLC发生脉冲的端口进行禁止输出,如三菱plc的可以置位特殊寄存器来实现脉冲停止指令,禁止后输出端口将输出不了脉冲自然就暂停了伺服电机的运行。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电源
+关注
关注
185文章
18986浏览量
264556 -
驱动器
+关注
关注
54文章
9116浏览量
156518 -
PLC控制
+关注
关注
9文章
255浏览量
29730
原文标题:PLC控制伺服,如何实现暂停功能?
文章出处:【微信号:GKYXT1508,微信公众号:工控云学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
固德晟基于瑞萨新一代RA8T2 MCU的EtherCAT双轴伺服控制方案介绍
瑞萨电子携手合作伙伴固德晟推出基于瑞萨新一代RA8T2 MCU的EtherCAT双轴伺服控制方案,该方案采用FOC电机控制算法,实现双轴交流伺服

怎么样才能实现伺服的精确控制
实现伺服系统的精确控制,是一个系统工程,涉及 机械、电气、算法和参数调试 四个维度的协同优化。以下是实现高精度控制的关键环节和具体方法: 1


三菱FX3U PLC控制伺服电机的高速脉冲模式解析
三菱FX3U做为一款入门级PLC,应用很广泛,其实学习PLC就几点,开关量的输入、输出,就是我们平常所说的IO、伺服(或者步进电机)的控制、Modbus通信、模拟量输入输出,掌握了这些

伺服控制要 “集成 + 灵活”?TMC4671:硬件实现 FOC,还支持前馈补偿!
TMC4671:硬件实现FOC伺服控制要“集成+灵活”?做伺服项目时,大家总希望芯片既能装下核心功能,又能应对不同电机需求——而TMC467

智能立库堆垛机西门子1500PLC通过EtherCAT主站转Profinet实现和与多个伺服进行通讯
PROFINET协议。而为了追求更高的控制精度和动态响应,执行层的行走、提升和货叉机构选用了支持EtherCAT总线通讯的高性能伺服驱动器系统。 项目痛点(实施前): 1.核心协议冲突:西门子S7-1200PLC原生不支持Eth
伺服伴侣,Profinet转DeviceNet网关通讯保障后连接伺服驱动器与西门子S7-1200PLC
伺服伴侣,Profinet转 DeviceNet网关 通讯保障后****连接伺服驱动器与西门子S7-1200PLC 在工业自动化和控制系统中,DeviceNet转Profinet网关的
西门子S7-1200 PLC与SINAMICS V90伺服驱动器PROFINET通信控制实例
S7-1200系列PLC可以通过PROFINET与V90 PN型伺服驱动器组合进行速度控制,S7-1200 PLC负责发送控制命令和速度给定
Ethernet/IP转ProfiNet网关:汇川PLC与伺服电机通讯最佳配置方案
一、项目背景 某智能装备制造企业致力于打造高度自动化的生产车间,以提升产品质量和生产效率。在其新规划的生产线中,选用了 汇川PLC 作为核心控制设备,该PLC具备强大的运算能力和丰富的功能
如何实现罗克韦尔PLC与和利时伺服电机通讯-EtherCAT转EtherNet/IP
CEI-382是一款实现EtherCAT从站设备与EtherNet/IP主站设备之间数据交换的通信网关,可以轻松实现伺服驱动器、变频器等采用EtherCAT协议的设备与罗克韦尔(Rockwell)、欧姆龙等品牌
Ethernet/IP 转 CAN 实战:AB PLC 通过编码器实现伺服电机位置闭环控制
AB PLC与编码器通过EthernetIP转CAN通讯的完整应用案例 一、项目背景与需求 某自动化生产线需实现伺服轴的高精度位置检测,采用 AB CompactLogix 5000 系列 P
Profinet转CAN网关模块对实现西门子PLC与CAN变频器协同通信的助力研究
的通讯,确保AGV的精确控制和实时响应。 例如,某仓储物流项目里,运用Profinet转CAN网关模块达成了西门子PLC和雷赛伺服驱动器的连接,以此实现对电机转动的精准

伺服系统和PLC各自在什么场合使用
、铣削、钻孔等高精度加工。 案例 :伺服系统控制刀具的精确移动,实现±0.001mm的加工精度。 机器人关节控制 场景 :工业机器人、协作机器人(如焊接、装配、搬运)。 案例 :伺服电
伺服和PLC有什么区别
伺服系统和PLC(可编程逻辑控制器)在工业自动化中扮演不同角色,主要区别体现在功能、结构、应用场景和控制方式上,以下是具体分析:



评论