 自动驾驶及关键技术V2X研究
自动驾驶及关键技术V2X研究

预期智能网联车在未来十年还将迎来爆发增长,2025年可实现完全自动驾驶汽车的商业化,5G将为车联网行业带来跃进式的产品和商业模式创新,具备巨大的市场潜力。本文对自动驾驶及关键技术的分类、主要应用场景和运营商V2X业务发展建议进行分析。
关键词:自动驾驶 V2X C-V2X
1、引言
车联网指借助新一代信息和通信技术,实现车内、车与车、车与路、车与人、车与服务平台的全方位网络连接,提升汽车智能化水平和自动驾驶能力,构建汽车和交通服务新业态,从而提高交通效率,改善汽车驾乘感受,为用户提供智能、舒适、安全、节能、高效的综合服务。
智能网联汽车被认为是产业发展的方向和战略制高点,近年工信部陆续印发《汽车行业中长期发展规划》、《智能网联汽车技术路线图》、智能网联汽车标准体系与产业体系建设指南征求意见等;发改委印发《智能汽车创新发展战略》征求意见稿,从顶层设计、标准法规制定、试点示范区建设等方面积极推动智能网联汽车发展,而其关键技术V2X通信技术是其重要基石。
车联网产业生态的繁荣与基础网络接入密切相关,预期未来十年还将迎来爆发增长。2025年,远程和短程通讯终端的整车装备率增至80%,DA、PA车辆占有率保持稳定,高度自主驾驶(HA)车辆市场占有率约10%-20%。,5G将为车联网行业带来跃进式的产品和商业模式创新,具备巨大的市场潜力。
2、自动驾驶概述
2.1 自动驾驶等级
自动驾驶并不是仅仅指无人驾驶,自动驾驶技术的发展分为不同层级,以美国汽车工程师学会(SAE)的标准划分为例,可以把自动驾驶分为六个等级。
第0级:无自动化,由人类驾驶员全权操控汽车,可以得到警告或干预系统的辅助。这个等级为无自动驾驶辅助功能,完全是驾驶员控制。
第1级:驾驶支援,通过驾驶环境对方向盘和加减速中的一项操作提供驾驶支持,其他的驾驶动作由人类驾驶员进行操作。
第2级:部分自动化,通过驾驶环境对方向盘和加减速中的多项操作提供驾驶支持,其他的驾驶动作都由人类驾驶员进行操作。这个等级自动系统能够完成某些驾驶任务,但驾驶员需要监控驾驶环境,随时接管。
第3级:有条件自动化,由无人驾驶系统完成所有的驾驶操作,根据系统要求,人类驾驶者提供适应的应答。由系统和驾驶员分享控制权,驾驶员可以在特定场景放弃主要控制权,在系统控制时,驾驶员需要观察周围情况,在系统退出的时候随时接上。
第4级:高度自动化,由自动驾驶系统完成所有的驾驶操作。根据系统要求,人类驾驶者不一定需要对所有的系统请求作出应答,限定道路和环境条件等。在大部分时间中系统可以替代驾驶员操纵,驾驶员无需观察周围环境,属于有限自动驾驶辅助(高度自动驾驶)。
第5级:完全自动化:在所有人类驾驶者可以应付的道路和环境条件下,均可以由自动驾驶系统自主完成所有的驾驶操作。为真正的无人驾驶,汽车完全实现无人驾驶。
2.2 自动驾驶关键技术
自动驾驶的基本过程分为三部分:感知->认知->执行。首先通过传感系统,代替人的视觉和听觉感知,去搜集汽车周边信息,常用的传感器包括了摄像机、激活雷达、毫米波雷达等等,目前两种主流技术路线,一种是以特斯拉为代表的以摄像机为主导的多传感器融合方案;另一种是以谷歌、百度为代表的以激光雷达为主导,其他传感器为辅助的技术方案。然后具有人工智能特性的控制系统,根据驾驶员意图、当前车速度等状态及外部情况,规划驾驶指令、规划行驶路径,最后由执行系统来执行驾驶指令、控制车辆状态。
自动驾驶涉及的关键技术包括了V2X、高精度地图、决策与规划技术等关键技术。
V2X
自动驾驶的传感系统需要通过搜集汽车周边信息,然后做出决策(转向、变道、加速、减速)。与现有的摄像头视频识别、毫米波雷达、激光雷达类似,V2X是一种获得其他车辆、行人行驶状态的手段,V2X的优势在于获得视距外汽车状态的一种有效手段,和雷达、摄像头视频识别、传感器共同组成了车辆对外界环境的信息获取系统。而这些信息是自动驾驶汽车做出决策的重要依据。
高精地图
高精地图拥有精准的车辆位置信息和丰富的道路元素数据信息,可以帮助汽车预知路面复杂信息,如坡度、曲率、航向等。和传统相比具有更高的实时性。由于道路路面经常发生变化,如道路整修、标识线磨损或重漆、交通标识改变等,这些改变都要及时反映在高精地图上。高精地图将更强调空间的三维模型以及精度,将精度从米级降到厘米级,必须非常精确的显示路面上的每一个特征和状况。
规划决策
决策是无人驾驶体现智能性的核心的技术,相当于自动驾驶汽车的大脑,它通过综合分析环境感知系统提供的信息,及从高精度地图路由寻址的结果,对当前车辆进行规划(速度规划、朝向规划、加速度规划等),并产生相应的决策(跟车、换道、停车等)。规划技术还需要考虑车辆的机械特性、动力学特性、运动学特性。常用的决策技术有专家控制、隐马尔科夫模型、贝叶斯网络、模糊逻辑等。
3、车用无线通信技术(V2X)
3.1 V2X定义
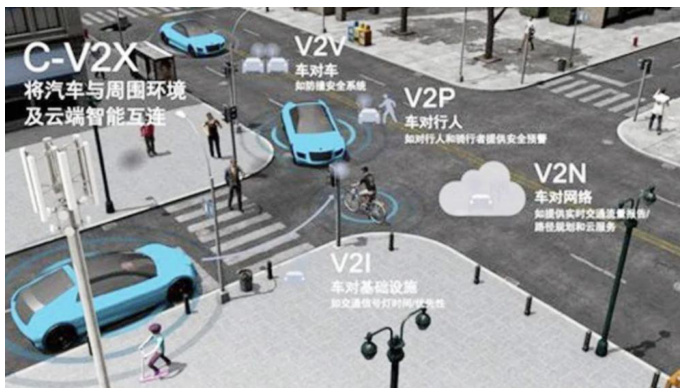
车用无线通信技术(Vehicle to Everything ,V2X)是将车辆与一切事物相连接的新一代信息通信技术,其中V代表车辆,X代表任何与车交互信息的对象,当前X主要包含车、人、交通路侧基础设施和网络。V2X交互的信息模式包括:车与车之间(Vehicle to Vehicle,V2V)、车与路之间(Vehicle to Infrastructure ,V2I)、车与人之间(Vehicle to Pedestrian,V2P)、车与网络之间(Vehicle to Network,V2N)的交互。
V2V技术允许车辆通过转发自身及前方的实时信息来预防事故的发生,从而减少驾驶时间,最终实现改善交通环境,减少交通拥堵的目的。
V2I技术通过无线的方式帮助车辆和路侧的交通设施实现数据交换,主要应用包括交叉路口安全管理、车辆限速控制、电子收费、运输安全管理,以及道路施工和限高警示等。这项技术会推动交通设施智能化,包括禁止驶入灯标、天气信息系统等交通设施都可进化为通过多种算法可识别高风险情况并自动采取警示措施的智能交通设施。
V2P技术则使得行人和骑车人通过智能手机成为V2X通信环境中的一个节点。它可以发送或接收警示信号,例如可以预先告知联网信号灯自身是否需要延长过马路的时间,也可以提示附近车辆前方路口有行人要过马路,或者提示车辆相邻车道有自行车在骑行。
3.2 V2X两大产业化阵营
V2X产业分为DSRC和C-V2X两个标准和产业阵营。在中国市场,因为本身又坐拥全球最大的4G LTE网络和成熟的产业链,并且对DSRC技术上没有太多积累,考虑到规避专利风险等因素,因此有分析认为会向C-V2X倾斜。
DSRC(专用短程无线通信标准),以IEEE802.11p为基础,V2V为其主要的应用方式。DSRC最大的竞争筹码是启动早,早在1999年,美国联邦通信委员会就在5.9 GHz区域为V2X留出了75 MHz的带宽,美国、欧洲等国家已提出相关标准规格,经过十多年的发展历史,形成成熟的产业链,并可以进入商用。
C-V2X,C是蜂窝(Cellular),是基于4G/5G等蜂窝网通信技术演进形成的车用无线通信技术,包含LTE-V2X和5G-V2X,从技术演进角度讲,LTE-V2X支持向5G-V2X平滑演进。C-V2X 是移动通信标准化组织3GPP的推进下开始启动,目前正处于标准制定的关键阶段,并在2017年制定了第一版的标准,形成以华为、高通等通信产业链企业、电信运营商和汽车企业为主的产业阵营。
3.3 V2X典型应用场景
V2X目前主要覆盖3大典型应用场景:交通主动安全、交通效率和信息服务,并且向支持实现自动驾驶应用演进。在未来移动通信论坛和车载信息服务产业应用联盟,共同发布的《智能网联汽车基本应用白皮书》中定义了72种智能网联汽车应用场景,其中基本应用场景包括了以下:
交通主动安全:前向碰撞预警、左转辅助/告警、汇入主路辅助/碰撞告警、交叉路口碰撞告警(有信号灯/无信号灯/非视距等,存在路边单元)、交叉路口碰撞告警(有信号灯/无信号灯/非视距等,不存在路边单元)、超车辅助/逆向超车提醒/借道超车、盲区告警/换道辅助、紧急制动预警(紧急电子刹车灯)、车辆安全功能失控告警、异常车辆告警(包含前方静止/慢速车辆)、静止车辆提醒(交通意外,车辆故障等造成)、非机动车(电动车,自行车等)横穿预警/行人横穿预警、紧急车辆提示、道路湿滑/危险路段提醒(大风、大雾、结冰等)、创红灯(/黄灯)告警)
交通效率:减速区/限速提醒(隧道限速、普通限速、弯道限速等)、车速引导、车内标牌、电子不停车收费
信息服务:进场支付、自动停车引导及控制、SOS/eCALL业务、车辆被盗/损坏(包括整车和部件)警报、车辆远程诊断,维修保养提示
4、基于蜂窝网通信技术的车用无线通信技术(C-V2X)
4.1 C-V2X通信接口
C-V2X中包含了两种通信接口:一种是车、人、路之间的短距离直接通信接口(PC5),另一种是终端和基站之间的通信接口(Uu),可实现长距离和更大范围的可靠通信。C-V2X 直接通信可提供扩展的通信范围和增强的可靠性,而不依赖蜂窝网络的协助或覆盖。
网络通信(Uu接口),利用LTE广播,通过V2X服务器中转,把信息传送到另一个节点。通过LTE方式无线基站对V2V数据的调度和接口的管理进行辅助。Uu接口具有广覆盖,可回传到云平台特点,适合信息娱乐类、远距离的道路危险或交通状况、延迟容忍安全消息等业务类型。
直连通信(PC5接口),以LTE标准中的D2D(Device-To-Device,设备间)邻近通信服务为基础。PC5接口,可以实现250Kph的高速度和高密度通信,支持无LTE网络覆盖下通信LTE-V2X同时支持基站和全球导航卫星系统(GNSS)的时间同步。允许用户在有或没有网络覆盖的条件下彼此间直接广播消息。PC5接口具有低延时、覆盖范围小特点,适合交通安全类、局域交通效率类业务。
4.2 C-V2X标准化进展
C-V2X的标准化可以分成3个阶段:
支持LTE-V2X的3GPP R14版本标准已于2017年正式发布,在TR22.885中定义了V2V(车到车)、V2I(车到路边设施)、V2P(车到人)、V2N(车到网络)、V2X(车到其它)等27类场景,面向辅助驾驶和交通安全。
支持LTE-V2X增强(LTE-eV2X)的3GPP R15版本标准于2018年6月正式完成。标准TS22.886中已经定义了25个用例共计5大类增强的V2X业务需求,包括基本需求、车辆编队行驶,半/全自动驾驶、传感器信息交互和远程驾驶。
支持5G-V2X的3GPP R16+版本标准于2018年6月启动研究,将与LTE-V2X/LTE-eV2X形成互补关系。5G eV2X当前仅完成需求规范,定义了25个用例,包括自动排队驾驶、半/全自动驾驶、支持扩展传感、远程驾驶和通用需求。目前,3GPP 5G NR支持V2X的标准化工作,有望在2018年年底,列为R 16版本的标准化项目进行研究与标准化;预期NR-V2X产品最早有可能于2022年在上市车型中面世。
我国也在推进C-V2X标准化工作,例如工信部联合国标委发布“国家车联网产业标准体系建设指南”, 其中信息通信分册为V2X通信标准建设给出了体系参考;CCSA为主承担V2X通信行业标准制定,目前完成总体及空口要求,计划2018年完成安全及网络设备标准;此外多个行业协会或联盟在应用及其他关键技术上开始发力。
5、国内外电信运营商V2X业务发展情况及建议
5.1 国内外运营商积极推进V2X业务
摩根士丹利于近期发布了一份无人驾驶研报预计,无人驾驶汽车将给全球通信产业带来1.3万亿美元的市场增量。“以5G通讯网络为基础的无人驾驶将带来产业革命,而这场革命带来的市场机会没有受到足够的重视”,该研报小组负责人Emmet Kelly称,“无人驾驶汽车对通讯行业的改变要比智能手机的出现对其改变还要大。”一级无人驾驶汽车需要每小时3G的数据空间,而五级无人驾驶汽车每小时将消耗50G数据。
国内外各大运营商都积极推进C-V2X业务:
AT&T在消费者电子展上宣布,它将于德尔福和福特合作,共同提升汽车与其他车辆及基建设施的沟通效率。AT&T也正在与美国驾驶测试中心合作,在密歇根建立了无人驾驶汽车测试中心。
NTT Docomo在今年世界移动通信大会上,与SONY联合展示新概念车,发力无人驾驶市场。所构建的基于5G连接的自动驾驶车辆,装备了4K摄像头、传感器和数字标识系统,可以带来一个全新的乘车体验。车上的4K数字标识和显示系统可以用来展示广告和信息;通过车辆上安装的图像传感器手机的视频进行分析,可实现基于位置的信息交互;通过超高清摄像机解决方案,4K驾驶显示屏可以实现360度测量,超过人类视觉;通过云可以实现远程驾驶和控制。NTT Docomo同时构建了基于边缘计算的车联网平台,为今后车联网大数据分析做好基础设施准备。
国内的三大运营商也纷纷联合车厂、通信设备商在5G试验环境完成无人驾驶车测试,例如在今年4月,中国电信携手中兴通信和百度在雄安新区完成了基于5G环境的无人驾驶试验。
5.2 运营商V2X业务发展建议
但无人驾驶的商业化投资成本巨大,我国的高速公路有20万公里左右,按照站间距200米算,大概需要100万的设施数量,高速路旁边立的10多米杆的费用是每个10万及以上甚至更多,投入很大。因此需要解决商业模式、产业合作等问题,目前由哪一方来为车联网投资还不明朗,如果政府投资,持续性很难保证,政府还需要考虑更多优先级更高的投资。作为电信运营商企业,投资需要考虑有商业模式在里面,不仅仅是技术的选择,还需要考虑消费的需求,需要结合最终受益者和出资方的想法,面向具体应用场景进行解决方案的客户化适配。
例如将V2X运用在红绿灯提醒等辅助类驾驶功能这种场景,老百姓消费意愿比较弱,而如果在“两客一危”上,通过V2I为这些车做安全提示跟车速引导,可以有效减少危险事故的发生,这样对于政府监管部门也有积极性去建路测设备,老百姓也可以从中受益。此外客户对于自动驾驶的消费意愿更加强烈,可以优先在车速度低的封闭园区、高速公路等封闭类的道路应用场景来推动网联化的自动驾驶,寻求一两个市场接受的应用场景,形成良性循环。
-
运营商
+关注
关注
4文章
2441浏览量
46656 -
自动驾驶
+关注
关注
794文章
14993浏览量
181566
原文标题:技术 | 自动驾驶及关键技术V2X研究
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
贸泽电子自动驾驶汽车在线资源中心助力解决实际部署面临的各项挑战
Transformer如何让自动驾驶大模型获得思考能力?
Qorvo UWB和V2X技术构筑车联网安全防线

自动驾驶BEV Camera数据采集系统:高精度时间同步解决方案

汽车自动驾驶的太阳光模拟应用研究

不同等级的自动驾驶技术要求上有何不同?
西井科技端到端自动驾驶模型获得国际认可
想实现自动驾驶,哪些技术非常关键?
卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

科普|V2X是什么意思?

韩国自动驾驶技术交流团到访光庭信息
车联网V2X通信:贴片电容信号完整性优化与EMC设计
V2X技术全解析
基于CANoe的V2X安全通信方案



评论