 Hyqreal机器狗可拉动一架3吨重的飞机
Hyqreal机器狗可拉动一架3吨重的飞机

大约从 2010 年开始,意大利技术研究所(IIT)的 Dynamic Legged Systems Lab(DLS)就一直致力于研究液压驱动四足机器人,并在 2011 年的 IROS 大会上首次展示了他们的 HyQ 研究平台,自此他们一直利用该平台进行一些重大的研究。但是在机器人学中,九年是一段非常非常漫长的时间,相对于最近(更具活力)的四足动物(如Spotmini、Anymal和Cheetah 3),Hyq似乎已经有些古老了。
近日,意大利理工学院(IIT)的研究人员宣布其研发了全新的大规模升级的四足机器人,名为Hyqreal。在热那亚机场展示了Hyqreal机器人的力量,Hyqrea拉动一架3.3吨重的Piaggio P180 Avanti客机近33英尺。
HyQReal 长 1.33m,高 0.9m,加上内部液压系统和电池,它的重量为 130kg。这款机器人由一个铝制防滚架以及凯夫拉尔、玻璃纤维和塑料组成的外壳保护。机器人还有定制的橡胶垫脚,当前行困难时可提供牵引力。机器人载有两台计算机,一台指引视觉方向,一台用于控制。
近日,Dynamic Legged Systems Lab 负责人 Claudio Semini 在 ICRA 大会举办了一场研讨会,详细介绍了 HyQReal 的整体性能。
在液压系统方面,IIT 和 Moog 合作,使用他们的集成智能致动器,每个致动器都有 3D 打印的钛装置。该装置包含所有传感器、电子器件和流体路径。HyQReal 有两个独立的液压泵,一个驱动前腿,一个驱动后腿。电池(重 15kg)大概可以用两个小时,虽然 IIT 还没有做过续航测试。由于致动器大部分是密封的,所以 HyQReal 是防水防尘的,可以在喷水或洒满沙子的情况下保持移动。
ICRA 上展示了机器人小跑、躺下和再次站起来的简短视频。据说它能够在坠落后自动恢复,但 IIT 还没有测试过这一点。HyQReal 是一款非常非常新的机器人,所以有很多东西研究人员还没来得及搞清楚,也没有机会给它安装结实的电动手臂,而这是对这款机器人的长期规划之一。
其实,拉飞机并不是 HyQReal 的主要工作。更广泛一点来说,它是为了「在紧急情况下支援人类」而开发的,应该是「灾难响应、农业、设施停运和检查」的理想选择。但目前它仍是一款研究型机器人,尽管这份研究是基于 IIT 对之前的 HyQ 所做的工作。IIT 希望接下来能够加快研究,以实现其工业化。
-
IEEE
+关注
关注
7文章
420浏览量
50589 -
机器人
+关注
关注
215文章
31800浏览量
224991
原文标题:Hyqreal机器狗可拉动一架3吨重的飞机
文章出处:【微信号:IEEE_China,微信公众号:IEEE电气电子工程师】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录

[Optiwave] OptiSystem应用:无人机(UAV)中继通信系统仿真
汇川技术助力全球首款3吨级eVTOL首飞

高负载工业机器狗锂电池完整设计方案要求
Ramy RC 巨型 A380 模型首飞背后:Tattu 高倍率电池如何支撑一套四发 EDF 动力系统

40吨重卡的EOL测试:虹科PCAN-Router Pro FD并行总线监控方案

四足机器狗面临的热管理与散热挑战:持续运行的隐形障碍

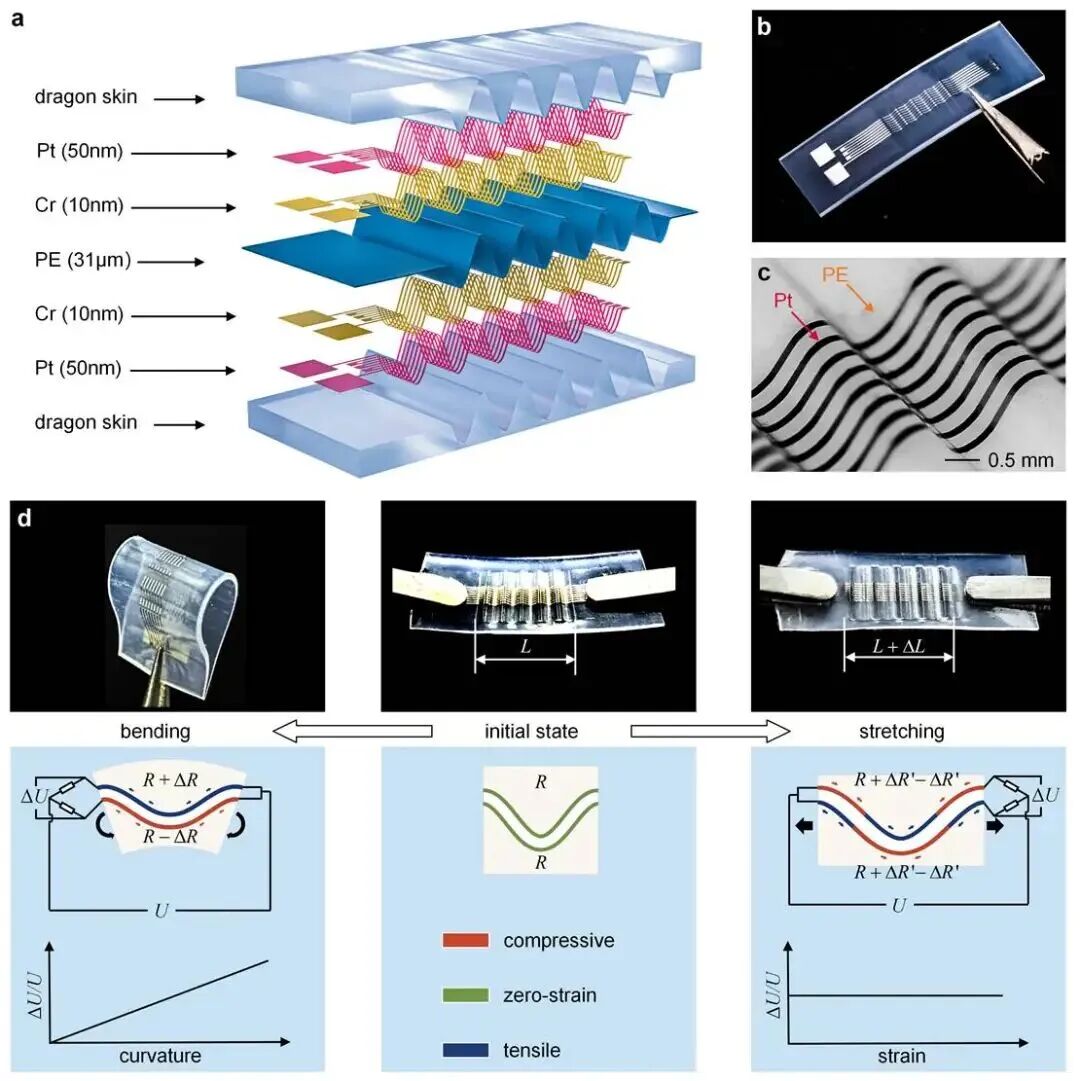
中国科学院:在可拉伸曲率传感器方面取得进展

德国桑格尔(SÄNGER II)高超声速计划:20世纪末空天飞机的技术巅峰与遗产
华为多智能体协同系统为机器狗提供业务体验保障
产品案例 | 遛“狗”新方式,盒子来帮忙

智能网版测试仪应用 | 可拉伸电子器件的丝网印刷




评论