 亚马逊增加打包机器人 是人类打包速度的4至5倍
亚马逊增加打包机器人 是人类打包速度的4至5倍

据路透援引知情人士报道称,亚马逊近年来在开始在少数几个仓库中增加打包机器人,能浏览从传送带上下来的商品,并在随后几秒的时间里将其打包装入定制的盒子中,其每小时可打包600-700个包裹,是人类打包速度的 4 至 5 倍。
亚马逊目前还只是在少部分仓库采用了这一技术,但消息人士还告知外媒,亚马逊正考虑将这一技术应用到另外十多个仓库中,这些打包的机器可以替代每个仓库中至少24名相关的员工,目前亚马逊每个仓库的员工超过了2000名。这意味着亚马逊在美国的55个物流中心将削减1300多个岗位,预计将在两年内收回成本。
作为一家电子商务的巨头,亚马逊的物流中心是该公司最重要的运作引擎,在这些巨大的仓库中,工人们在把每一份订单送到买家的手中之前,都会对其进行追踪、打包、分类和检验。
这种新机器叫做CartonWrap,由意大利CMC Srl公司提供。据该公司官网介绍,CMC CartonWrap是一个自动纸箱包装系统,可以满足电商和其他使用大量不同大小盒子的公司的打包需求。亚马逊并不是唯一家测试CMC包装技术的公司。据一位知情人士透露,京东和Shutter Fly以及沃尔玛也使用了这些机器人。沃尔玛于3年前开始在美国的几个地点部署这些机器人。
近年来,越来越多的报道显示出亚马逊对提高生产效率的迫切需求。2018年2月,亚马逊正在研发的一款智能快递机器人被曝光。该机器人支持自动驾驶功能,能够从某个地方触发,带着要运送的包裹,然后将它自动送到正确的地方。
2019年1月,亚马逊与法国仓库机器人公司Balyo日前达成投资协议,亚马逊在未来七年内可以持有后者近三分之一的股份。该协议旨在促进这家法国公司无人驾驶叉车技术的出售。
2019年4月11日消息,据TechCrunch报道,亚马逊宣布收购了机器人初创企业Canvas Technology。Canvas Technology是一家仓库机器人公司,主要研发能够改善货仓内存货管理效能的智能管理系统,并已造出了可在仓库周围移动货物的智能推车。
更有业内人士透露,亚马逊将在2019年推出一款集云服务、大数据、智能语音、物联网、AI以及5G技术为一体的多功能机器人。这一机器人问世后,将成为该网络巨头在开发创新智能设备领域超越竞争对手的秘密武器。
-
机器人
+关注
关注
213文章
31444浏览量
223667 -
亚马逊
+关注
关注
8文章
2736浏览量
85889
原文标题:【配天机器人 | 市场】亚马逊引入打包机器人,数千人工作将被取代
文章出处:【微信号:gaogongrobot,微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
10米/秒,刷新世界纪录!宇树科技H1速度逼近人类百米巅峰速度

Neway电机方案在机器人技术方面的优势
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
小萝卜机器人的故事
亚马逊计划用机器人取代美国60万名工人
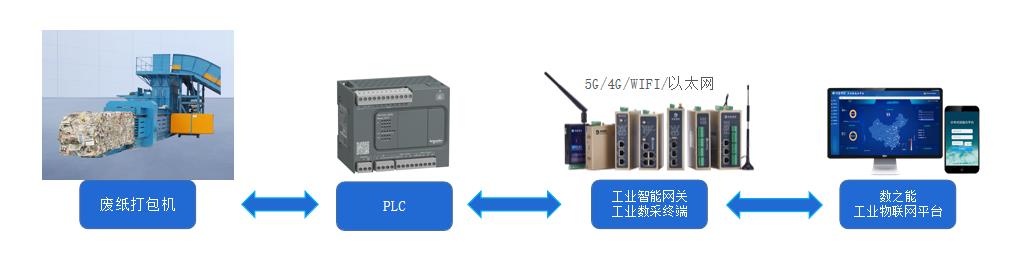
废纸打包机远程监控运维管理系统方案
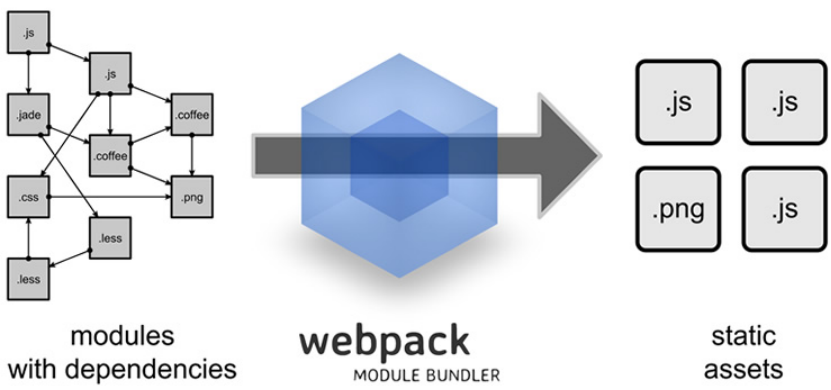
聊聊 Webpack 那些安全事儿:打包风险与防护小技巧
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
里程碑!亚马逊第 100 万个机器人上岗!人类员工岌岌可危?
当机器人遇上“语言障碍”:CCLINKIE转Profinet的“破冰外挂”来啦\\!
打包机数据采集远程监控系统方案

Linux文件系统打包及镜像制作,触觉智能RK3562开发板演示



评论